直驱XY平台变增益交叉耦合互补滑模轮廓控制
2019-01-17 06:14金鸿雁赵希梅
电机与控制学报 2019年12期
关键词:不确定性
金鸿雁 赵希梅

摘 要:针对永磁直线同步电动机(PMLSM)直接驱动XY平台存在的系统不确定性因素及双轴间耦合的问题,在建立双轴直驱平台数学模型和分析系统轮廓误差的基础上,采用将互补滑模控制器(CSMC)与变增益交叉耦合控制器(VGCCC)相结合的轮廓控制策略以保证系统实现高精密轮廓加工。CSMC作为反馈控制器,可抑制参数变化、外部扰动以及摩擦力等不确定性因素对系统的影响,保证系统的强鲁棒性。同时,引入VGCCC解决直驱XY平台间参数不匹配造成的耦合问题,VGCCC可根据轮廓误差估计模型得到的实时轮廓误差改变控制器的补偿增益值,将轮廓误差按照一定比例分配到各轴中,减小系统轮廓误差,从而实现双轴精密轮廓加工,满足系统要求的控制精度。实验结果表明,该方法使直驱XY平台伺服系统具有较强的鲁棒性能和跟踪性能,进而提高了系统的轮廓加工精度。
关键词:直驱XY平台;不确定性;互补滑模控制器;变增益交叉耦合控制器;轮廓控制
DOI:10.15938/j.emc.(编辑填写)
中图分类号:TP273文献标志码:A 文章编号:1007-449X(2016)00-0000-00(编辑填写)
Abstract:For permanent magnet linear synchronous motor(PMLSM) direct drive XY table has the problems of uncertainties and biaxial coupling,on the basis of the establishment of PMLSM mathematical model and the analysis of system contouring error, a contouring control strategy combined complementary sliding mode control(CSMC) and variable gain cross-coupled controller(VGCCC) is proposed. CSMC is designed as a feedback controller. It can suppress the influence of uncertainties such as parameter variations, external disturbances and frictions of the system, and guarantee the strong robustness. Meanwhile, VGCCC is introduced to solve the coupling problems caused by mismatched parameters between the XY table.VGCCC can change the controller's compensation gain based on the real-time contour error obtained from the contour error estimated model. The contour error is allocated to each axis in a certain proportion to reduce the system contour error, thus the precision contour machining is realized and the control precision required by the system is met. The experimental results show that this method makes direct drive XY table has strong robust performanceand tracking performance, and further improves the contour machining accuracy of the system.
Keywords: direct drive XY table;uncertainties;complementary sliding mode controller;variable gain cross-coupled controller, contouring control
0 引 言
高新技術的快速发展和机械产品的更新换代对数控机床系统进给伺服驱动提出了越来越高的要求,这就需要数控机床满足高精度、高效率的加工需求[1-2]。XY平台采用永磁直线同步电动机(permanent magnet linear synchronous motor, PMLSM)作为直接驱动方式,消除了传统旋转电机中的机械变换机构,有效减小机床在进给过程中所受的摩擦力,提高加工效率,在高精密、高可靠性、快响应的进给系统中具有极大的优势[3]。
在多轴联动数控机床系统中,数控加工精度会受到机械部件、电气设备以及运行环境等方面影响,使加工过程中实际轮廓运动和参考轮廓运动之间产生轮廓误差,而轮廓误差的存在会大大影响工件的加工质量[4]。为满足数控机床多轴联动系统的伺服性能,需保证两方面:其一,要保证单轴的运动精度和动态性能;其二,要保证多轴系统之间的协同运动精度[5]。而现有的控制策略大多着重于提高单轴系统跟踪精度,以减小轮廓误差,但在实际应用场合中,轮廓误差不是每个轴跟踪误差的简单线性叠加,因此,提高单轴精度不一定能时刻满足系统进给要求[6-7]。就XY平台轮廓加工而言,轮廓加工轨迹是通过x、y轴协同运动完成的,保证单轴位置跟踪精度和双轴联动精度对于提高XY平台伺服系统轮廓加工性能有很大意义[8-9]。
文献[10]采用积分滑模控制器改善数控机床轮廓加工精度,有效解决了滑模控制的抖振问题,但需对滑模面和积分控制律进行选取,而滑模面的选择主要基于经验法则,且只适用于具有虚数部分开环极点的系统。文献[11]提出基于函数链径向基神经网络的双直线电机交叉耦合控制(cross-coupled control, CCC)方法,有效改善了系统跟踪精度,降低了系统抖振,但该方法所采用的CCC只适用于线性轮廓加工,无法保证非线性轮廓下的加工精度。文献[12]采用基于径向基神经网络的滤波型滑模控制方法保证双轴协同运动系统稳定运行,抑制了系统总不确定性对系统性能的影响,提高了单轴跟踪精度,但由提高单轴精度而引起的轮廓误差改善效果并不明显。文献[13]对龙门定位平台的精密运动进行控制,设计了一种Hsieh-Pan摩擦力模型抑制非线性摩擦力对系统的影响,但新模型的设计过程中需采用遗传算法和粒子群算法进行参数估计。
针对PMLSM直驱XY平台伺服系统,本文采用一种互补滑模控制器(complementary sliding mode controller, CSMC)和变增益交叉耦合控制器(variable gain cross-coupled controller, VGCCC)相结合的控制方法解决不确定性因素和双轴间的耦合对系统的影响,改善系统轮廓加工性能。CSMC作为单轴PMLSM系统的反馈控制器,将互补滑模面与积分滑模面结合,对系统中存在的参数变化、外部扰动和摩擦力等不确定性因素进行抑制,确保系统具有强鲁棒性。另外,通过建立轮廓误差估计模型得出轮廓误差与跟踪误差之间的关系,采用VGCCC实现两轴间解耦,根据轨迹运动的实时位置,调整控制器的补偿增益值,从而减小由两轴间参数不匹配问题对系统造成的影响。实验结果表明,该方法能有效改善XY平台伺服系统的鲁棒性能和轮廓加工精度。
1 XY平台数学模型
1.1·PMLSM数学模型
XY平台由两台PMLSM直接驱动轴向互相垂直的x、y两轴进行平面精密轨迹运动。由于两台PMLSM在结构上相同,故PMLSM数学模型一致。
1.2 轮廓误差模型
轮廓误差由直驱XY平台中两轴间的位置跟踪误差耦合产生,是由于单轴PMLSM的跟踪误差导致的实际轨迹与参考轨迹之间的偏差。因此,在系统运行时,单轴受到的任何系统不确定性因素以及双轴间的不匹配问题都会影响轮廓误差。XY平台轮廓误差模型如图1所示。
图中, 为参考位置; 为刀具运动的实际位置,是x轴和y轴PMLSM协同运动而产生的; 为加工圆弧的轨迹半径; 为 相对于x轴的倾斜角度; 为 相对于x轴的倾斜角度;e为位置跟踪误差;ex和ey分别为e在x和y轴的分量; 为轮廓误差,是实际位置到参考位置之间的垂直距离。
2 XY平台伺服系统总体设计
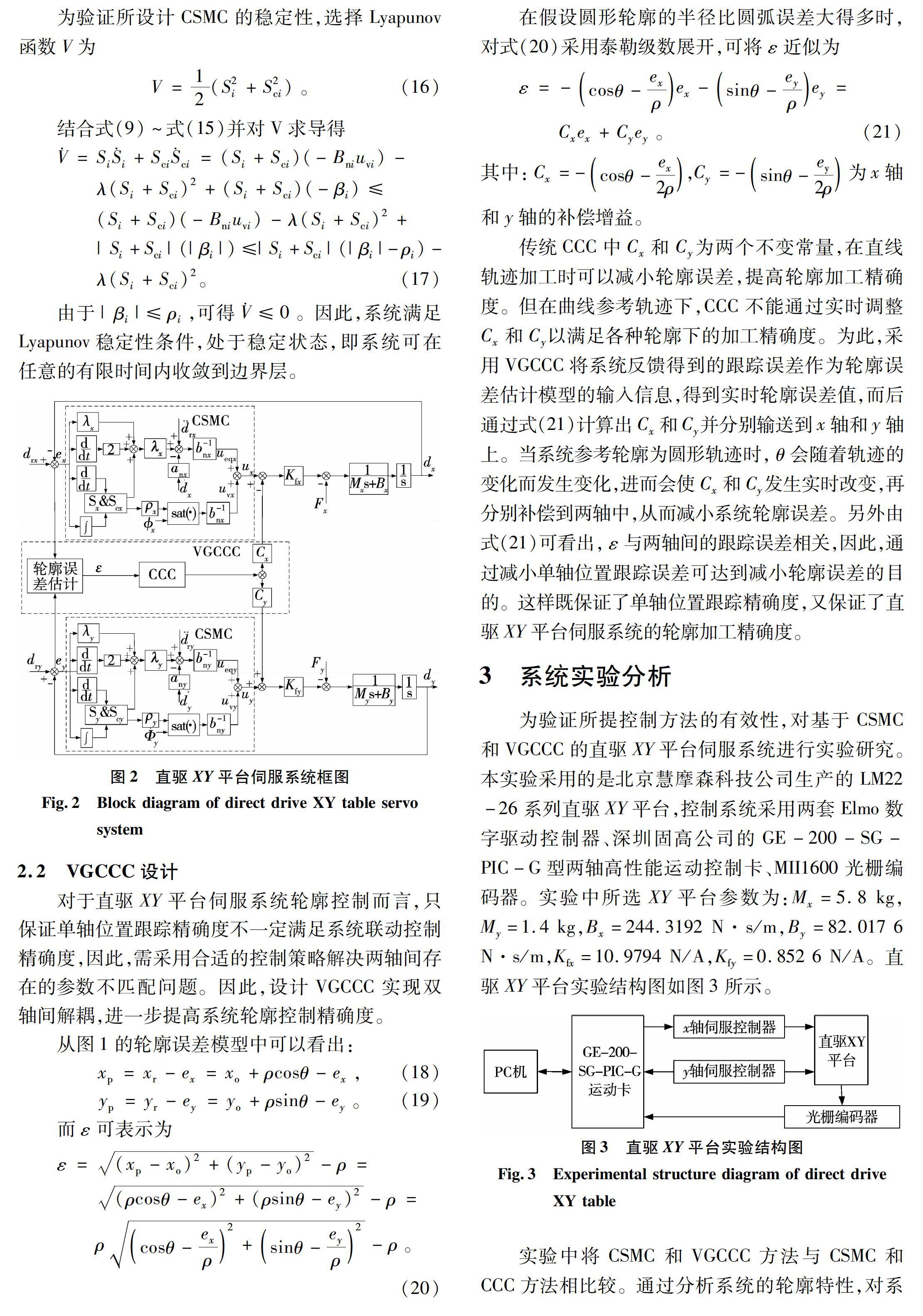
直驱XY平台伺服系统框图如图2所示。由于PMLSM易受到不确定性因素和耦合问题影响而降低系统性能。为保证系统轮廓加工精度,采用CSMC和VGCCC相结合的轮廓控制策略。CSMC用来抑制系统中存在的参数变化、外部扰动和摩擦力等不确定性因素,保证单轴PMLSM的鲁棒性能,减小单轴位置跟踪误差。VGCCC用来实现x、y轴间的解耦,通过轮廓误差估计模型得出轮廓误差,再根据系统实时位置调整控制器补偿增益值,从而提高系统轮廓加工精度,保证系统实现高精度轮廓控制。2.1·CSMC设计
由于PMLSM直接驱动的XY平台伺服系统会受到参数变化、外部扰动和摩擦力等不确定性因素的影响,伺服系统的控制性能会大大降低。因此,设计CSMC改善系统鲁棒性能和跟踪性能。CSMC由积分滑模面和互补滑模面构成,可以使系统状态轨迹收敛于两个滑模面的交线上,保证系统的稳定性。CSMC系统框图如图2中虚框所示。
4结论
为解决直驱XY平台伺服系统中存在的不确定性因素以及耦合问题,采用CSMC和VGCCC相结合的轮廓控制方法。CSMC可以抑制参数变化、外部扰动及摩擦力等不确定性因素对系统的影响,减小单轴PMLSM跟踪误差,提高系统的跟踪精度和鲁棒性能。利用VGCCC解决直驱XY平台间动态参数不匹配等引起的耦合问题,提高系统的轮廓加工精度。实验结果表明,所提出的控制方法是有效可行的,使系统既有较强的鲁棒性能,又有准确的跟踪能力,从而提高XY平台的轮廓加工性能。
参考文献:
[1] PANAH P G, ATAEI M,MIRZAEIAN B, et al. A robust adaptive sliding mode control for PMLSM with variable velocity profile over wide range [J]. Research Journal of Applied Sciences Engineering & Technology, 2015, 10(9): 997-1006.
[2] 孫宜标, 仲原, 刘春芳. 基于LMI的直线伺服滑模位移跟踪控制[J]. 电工技术学报, 2019, 34(1):33-40.
SUNYibiao, ZHONGYuan, LIUChunfang. Predictive robust contour tracking control for direct drive XY table servo system[J]. Transactions ofChina Electrotechnical Society, 2019, 34(1): 33-40.
[3] 朱国昕, 雷鸣凯, 赵希梅. 永磁同步电机伺服系统自适应迭代学习控制[J]. 沈阳工业大学学报, 2018, 40(1): 6-11
ZHU Guoxin, LEI Mingkai, ZHAO Ximei. LMI-based sliding mode displacement tracking control for permanent magnet linear synchronous motor [J]. Journal of Shenyang University of Technology, 2018, 40(1): 6-11.
[4] 武志濤,杨永辉. 一种永磁直线电机驱动X-Y 平台精密轮廓跟踪控制策略[J]. 电工技术学报, 2018, 33(17): 4037-4043.
WU Zhitao, YANG Yonghui. A precise contour tracking control method for X-Y table driven bypermanent magnet linear motors [J]. Transactions ofChina Electrotechnical Society, 2018, 33(17): 4037-4043.
[5] IWASHITA Y, IIJIMA K. High-precision contouring control of table drive system in machine tools using lost motion compensation based on static characteristics of ball screws [J]. Journal of the Japan Society for Precision Engineering, 2016, 82(9): 828-836.
[6] 赵希梅, 赵久威, 李洪谊. 直驱XY平台伺服系统预测鲁棒轮廓跟踪控制[J]. 电机与控制学报, 2014, 18(8):94-98.
ZHAO Ximei, ZHAO Jiuwei, LI Hongyi. Predictive robust contour tracking control for direct drive XY table servo system[J]. Electric Machines and Control, 2014, 18(8): 94-98.
[7] BA D B, UCHIYAMA N, SIMBA K R. Contouring control for three-axis machine tools based on nonlinear friction compensation for lead screws [J]. International Journal of Machine Tools & Manufacture, 2016, 108: 95-105.
[8] MOHAMMAD A, UCHIYAMA N, SANO S. Energy saving in feed drive systems using sliding-mode-based contouring control with a nonlinear sliding surface[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(2): 572-579.
[9] EKM A, UCHIYAMA N, Sano S. Sliding mode contouring control design using nonlinear sliding surface for three-dimensional machining [J]. International Journal of Machine Tools & Manufacture, 2013, 65(2): 8-14.
[10] Xi X C, ZHAO W S, POO A N. Improving CNC contouring accuracy by robust digital integral sliding mode control [J]. International Journal of Machine Tools & Manufacture, 2015, 88: 51-61.
[11] LIN F J, CHOU P H, HUNG Y C, et al. Field-programmable gate array-based functional link radial basis function network control for permanent magnet linear synchronous motor servo drive system[J]. Iet Electric Power Applications, 2010, 4(5):357-372.
[12] LIN F J, HSIEH H J, CHOU P H. Tracking control of a two-axis motion system via a filtering-type sliding-mode control with radial basis function network [J]. Iet Control Theory & Applications, 2010, 4(4): 655-671.
[13] LIN C J, YAU H T, TIAN Y C. Identification and compensation of nonlinear friction characteristics and precision control for a linear motor stage[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(4): 1385-1396.
猜你喜欢
南风窗(2017年9期)2017-05-04
首席财务官(2016年11期)2017-01-05
湖北函授大学学报(2016年14期)2017-01-04
东方教育(2016年4期)2016-12-14
美与时代·城市版(2016年10期)2016-12-12
科技视界(2016年20期)2016-09-29
考试周刊(2016年11期)2016-03-17
湖南大学学报·自然科学版(2014年3期)2014-12-30