双平面多参数并行辨识双滑模观测器
2019-01-17 06:14张懿吴嘉欣孙霄阳韦汉培魏海峰李垣江储建华
电机与控制学报 2019年12期
张懿 吴嘉欣 孙霄阳 韦汉培 魏海峰 李垣江 储建华
摘要:针对传统滑模观测器低速性能差的问题,提出一种带定子电阻辨识的五相感应电机滑模速度观测器,实现宽范围的五相感应电机无速度传感器运行。建立五相感应电机在旋转坐标系下的电压方程,基于此将五相感应电机解耦成基波平面与三次谐波平面分别独立控制。谐波面上构建第一滑模观测器用于电机定子电阻和转子转速在线辨识。在此基础上,将第一滑模观测器辨识结果加载入基波面上的第二滑模观测器,用于转子电阻和转子时间常数在线观测,继而有效克服温度、集肤效应等因素对转子参数的影响,进一步提高无速度传感器运行性能。实验结果验证了本文所设计双滑模观测器无速度传感器技术的有效性和实用性。
关键词:五相感应电机;滑模观测器;定子电阻辨识;解耦控制;无速度传感器
DOI:10.15938/j.emc.(编辑填写)
中图分类号:(TM301) 文献标志码:A 文章编号:1007 -449X(2017)00-0000-00(编辑填写)
Abstract:The performance of the traditional sliding mode observer at low speed is poor. In view of this problem, a sliding mode speed observer for five phase induction motor with stator resistance identification is proposed to realize the wide range speed sensorless operation. The voltage equation of the motor inrotating coordinate system was established. Based on this, the motor was decoupled from the fundamental plane and the three harmonic plane independently. On the harmonic plane, first observer was constructed to realize the online identification of stator resistance and rotor speed. And on the fundamental plane, identification results of the first observer were loaded on the second observer to realize the online observation of rotor resistance and time constant, then the effect of temperature and skin effect on the rotor parameters were effectively overcome to further improve the performance of the speed sensorless. Experimental results verified the effectiveness and practicability of speed sensorless technology with double sliding mode observer designed in this paper.
Keywords: five phase induction motor; sliding mode observer;stator resistance identification; decoupling control; speed sensorless
0 引言
多相感應电机闭环控制需速度传感器,考虑到减小控制装置大小、降低成本,以及系统的后期维护和可靠性问题,需摒弃传感器,实现无速度传感器控制。传统无传感器控制算法大多基于滑模观测器扩展反电势的观测,但因其固有抖振特性以及测量噪声使得其输出反电势存在大量的噪声扰动,尤其在低转速工况下反电势幅值低,性噪比低,造成电机转速值估计不准确。另外,多相感应电机高性能控制中,电机参数对解耦效果以及控制精度至关重要。随着运行工况的变化,集肤效应和温升等会造成定、转子阻值参数值发生摄动,气隙磁场饱和度也会相应地影响电感参数值,造成转子时间常数等的波动,影响整个控制效果[1 - 3]。因此,对于多相感应电机来说,相关定、转子参数的准确辨识有着至关重要的意义。
为有效降低电机参数摄动对控制性能的影响,国内外学者对有关电机参数辨识问题进行了不懈努力,各种参数辨识法被相继提出,如模型参考自适应法[4 - 5]、人工智能法[6 - 8](遗传算法、模糊系统、神经网络等)、递推最小二乘法[9]以及扩展Kalman滤波法[10 - 12]等。感应电机参数辨识方面,其中以转子时间常数辨识较为困难,其作为间接磁场定向控制的敏感变量。Zhao L等在文献[13]中通过转子槽谐波提取技术估计电机转速,在转速估计的前提下,提出一种用于转子时间常数辨识的感应电机模型导数形式,克服了转子磁链计算中的纯积分问题,调整后的粒子群优化算法利用该模型跟踪转子时间常数。Laroche E等在正弦稳态模式下进行感应电机参数估计,基于参数摄动得到一个模型,相对于新的参数集是线性的,此方法可在较小计算量的情况下得到一系列的参数估计,避免了关注局部极小问题[14]。Yepes A G等人在文献[15]中采用最小二乘法,实现了多相感应电机相关参数的离线辨识,并在文献[16]中对漏感等参数进行在线辨识,但是该方法只局限于正弦波结构的多相电机。总体看来,目前多相感应电机在抗参数摄动方面仍存在诸多难点,相关研究有待进一步加强。
针对复杂工况下五相感应电机定、转子参数摄动以及传统滑模观测器无速度传感器低速性能差的问题,设计一种双滑模观测器用于电机相关参数的在线辨识。提出以下思路:(1)将五相感应电机基波面和谐波面进行解耦,独立控制,双平面内分别构建滑模观测器;(2)谐波面观测器实现定子电阻和转速的在线辨识,加载于基波面滑模状态方程的构建,有效提高低速运行效果;(3)基波面观测器实现转子电阻和转子时间常数的在线观测,降低不同转差对其的影响,提高瞬态响应性能。为验证本文所提出控制策略的可行性和实用性,选取1.2kW五相感应电机为实验控制对象,对比实验结果验证了设计观测器参数辨识的可行性。
3 实验验证与分析
在五相感应电机交流调速平台上,对本文提出的双滑模观测器进行实验研究,实验电机参数为:额定功率 ,额定电压 ,额定电流 ,极对数 ,定子电阻 ,基波转子电阻 ,谐波转子电阻 ,基波互感 ,谐波互感 ,输出额定转矩 ,额定频率 ,额定转速 。实验中滑模面比例系数 ,转速自适应系数 ,定子电阻自适应系数 。具体实验系统平台如图2所示。
(1)谐波平面的滑模观测器验证
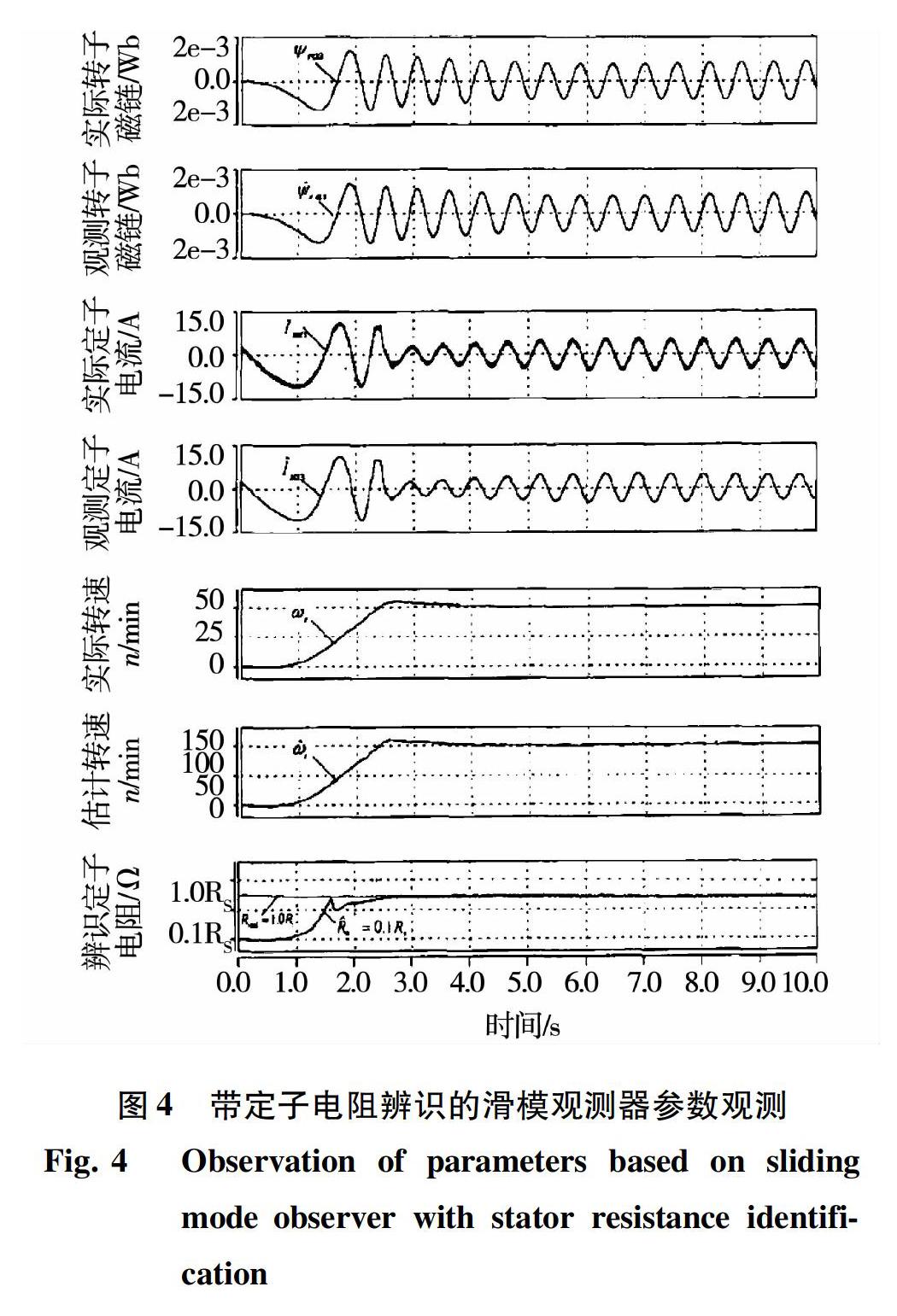
为验证定子电阻辨识对于滑模观测器的有效性,分别基于传统滑模观测器和本文提出的带定子电阻辨识的滑模观测器作对比实验,如图3和图4所示。分别给定电机 的低转速值,图3滑模观测算法中始终将定子电阻值设置为 不变,对比图3,图4中滑模观测算法中的定子电阻值始终在辨识更新中,定子电阻初始值为 。对比结果可知,定子电阻值误差对于谐波面上的转子磁链、定子电流观测以及转速估计均产生影响,产生相应的谐波和抖动,尤其在转子转速估计方面,定子电阻误差使得转子估计误差大大增加,抖振尤为明显。
图4投入定子电阻辨识环节,定子电阻辨识值从设定初值迅速收敛至实际值,转速估计逼近实际转速,误差大大減小,抖振消失,谐波面上的转子磁链以及定子电流观测更加平滑,正弦度增强。经分析,电机低速运行时,反电势值较小,定子电阻压降对系统影响较大,定子电阻的辨识对于低转速估计尤为重要。
(2)基波平面的滑模观测器验证
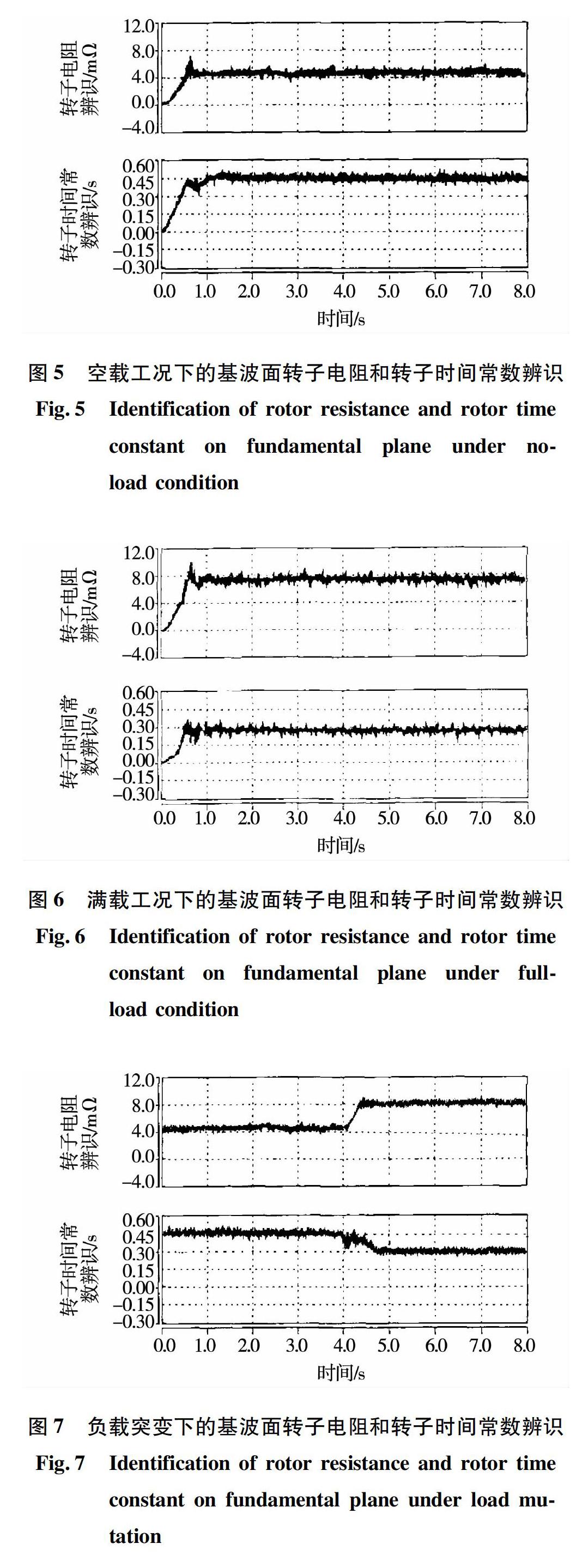
图5为空载工况下基波面转子电阻和转子时间常数辨识结果,考虑到滑模固有抖振性,将转子电阻和转子常数自适应律系数作相应减小, 左右收敛至实际值。对比图6满载工况下的实验结果,满载工况下转子电阻辨识值由空载的 变为约 ,增大约 ,转子时间常数相应地减小,由空载的 降低至 。经分析,一方面负载的变化改变了转差率,导致转子电流频率随之改变,由于集肤效应的存在改变了转子等效电阻值,并对转子漏感造成影响;另一方面,给定负载的变化增大了电流幅值,电机内温升使得转子电阻增大。
为了验证电机运行动态过程中参数辨识算法的有效性,进行了负载突变下的基波面转子电阻和转子时间常数辨识实验,如图7所示。在4s时刻之前,电机运行在空载工况下,对应图5所示的运行工况,在4s时刻给定电机突加额定负载,由图可知,转子电阻辨识经过大约0.4s时间快速趋于稳态,几乎无超调,而转子时间常数辨识值在突加负载时会有一个较小的超调,之后经过大约0.7s时间同样趋于稳态,最终辨识结果与图6基本一致。
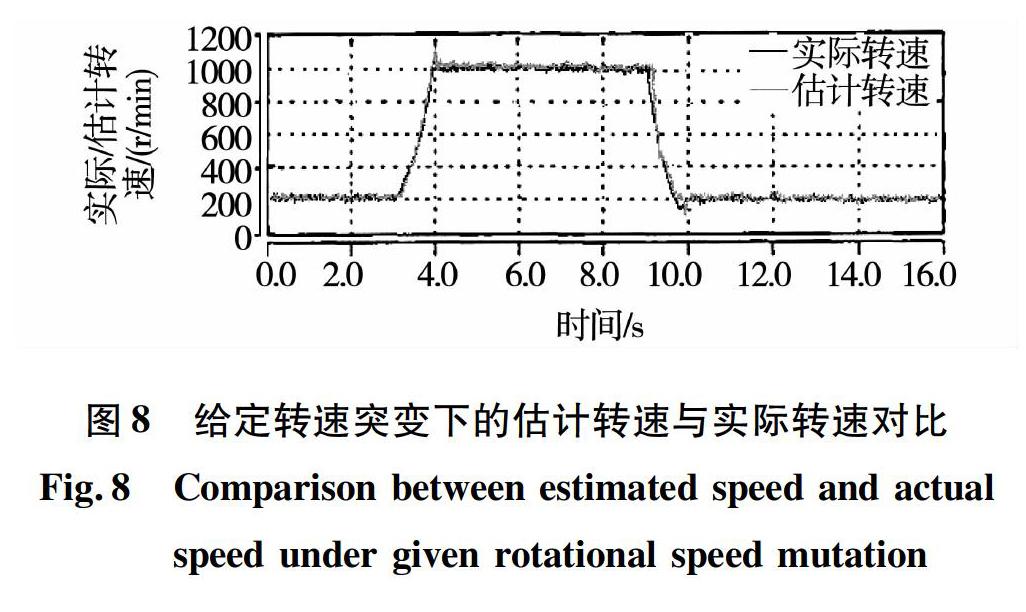
为了验证电机运行动态过程中转速辨识算法的有效性,进行了给定转速突变下的转速辨识实验,如图8所示为估计转速与实际转速对比。在3.0s时刻之前,给定电机200r/min的转速运行,在3.0s时刻,给定转速突升为额定转速值,在9.0s时刻,给定转速突降为200r/min。由图可知,电机转速估计在给定转速突变时能够严格跟随实际值,估计动态性能较好。
4 结论
传统三相感应电机控制的基础上,将五相感应电机解耦成双平面的三相感应电机,实现五相感应电机双平面多参数并行辨识。谐波面构建带定子电阻辨识的转速滑模观测器,有效拓宽了无速度传感器运行范围,改善低速运行效果。在谐波面定子电阻和转速辨识的基础上构建基波面上的新型滑模观测器,实现了基波面上的转子参数在线观测,有效避免温升、集肤效应对转子参数的摄动影响。实验结果显示所设计的滑模观测器观测效果较好,具有广阔的应用前景。
参考文献:
[1] 李辉,谢翔杰, 刘行中, 等.风电变桨电机参数对控制系统影响分析及改进辨识方法[J].电机与控制学报, 2019, 23(7): 9.
LI Hui, XIE Xiangjie, LIU Xingzhong, et al. Influ-ence of parameters on control system and improvedidentification method of pitch motor in wind turbin-e generator system[J]. ElectricMachines andContr-ol,2019, 23(7): 9.
[2] 夏超英,谷海青, 寇丽萍.考虑总漏感随频率变化的异步电机参数离线辨识算法[J].电机与控制学报, 2-018, 22(3): 42.
XIA Chaoying, GU Haiqing, KOU Liping. Offline parameter estimation algorithm for induction motor in consideration of leakage inductance variation wit-h frequency[J]. ElectricMachines andControl,201-8, 22(3): 42.
[3] 漆星,张倩. Actor-Critic框架下的数据驱动异步电机离线参数辨识方法[J].电工技术学报, 2019, 34(9): 1875.
QI Xing, ZHANG Qian. Data-driven induction mot-or parameters offline identification method based o-n Actor-Critic framework[J]. Transactionsof ChinaElectrotechnical Society, 2019, 34(9): 1875.
[4] 车海军, 王亮亮, 霍丽娇, 等. 改进的无功功率模型参考自适应异步电机转速辨识[J]. 电机与控制学报,2017, 21(10): 40.
CHE Haijun, WANG Liangliang, HUO Lijiao, et al.Improved reactive power model reference adaptive speedidentification applying to induction motor[J]. Electric Machines and Control, 2017, 21(10): 40.
[5] 韦文祥, 刘国荣. 基于CESO磁链观测器的模型参考自适应感应电机转速辨识[J]. 电机与控制学报, 201-6, 20(4): 57.
WEI Wenxiang, LIU Guorong.Speed identification for induction motor based on CESOflux observer and MRAS[J]. Electric Machines and Control, 2016,20(4): 57.
[6] WLAS M, KRZEMINSKI Z, TOLIYAT H A. Neural networ-k based parameter estimations of induction motors[J].IEEE Transactions on Industrial Electronics, 20-08, 55: 1783.
[7] 张立伟,张鹏, 刘曰锋, 等.基于变步长Adaline神经网络的永磁同步电机参数辨识[J].电工技术学报, 2018, 33(2): 378.
ZHANG Liwei, ZHANG Peng, LIU Yuefeng, et al.Parameter identification of permanent magnet synch-ronous motor based on variable step-size adaline n-eural network[J]. Transactionsof ChinaElectrotech-nical Society, 2018, 33(2): 378.
[8] 王耀南, 陈维. 无速度传感器的感应电机神经网络鲁棒自适应控制[J]. 中国电机工程学报, 2008, 28(33):92.
WANG Yaonan, CHEN Wei. Speed sensorless neur-al network robust adaptive control for induction m-otors[J]. Proceedings of the CSEE, 2008, 28(33): 9-2.
[9] WANG K, CHIASSON J, BODSON M, et al. A nonlinearleastsquares approach for identification of the induct-ion motor parameters[J]. IEEE Transactions on aut-omatic Control, 2005, 50(10): 1622.
[10] WLALAMI A, WAMKEUE R, KAMWA I, et al. Unscent-ed kalman filter for non-linear estimation of induct-ion machine parameters[J]. IET electric power appl-ications, 2012, 6(9): 611.
[11] BARUT M, BOGOSYAN S, GOKASAN M. Experimental evaluation of braided EKF for sensorless control ofinduction motors[J]. IEEE Transactions on IndustrialElectronics, 2008, 55(2): 620.
[12] 尹忠剛, 赵昌, 钟彦儒, 等. 采用抗差扩展卡尔曼滤波器的感应电机转速估计方法[J]. 中国电机工程学报, 2012, 32(18): 152.
YIN Zhonggang, ZHAO Chang, ZHONG Yanru, etal. A speed estimation method of induction motorsusing the robust extended kalman filter[J]. Proceedi-ngs of the CSEE, 2012, 32(18): 152.
[13] ZHAO L, HUANG J, CHEN J, et al. A parallel speed a-nd rotor time constant identification scheme for in-direct field oriented induction motor drives[J]. IEE-ETransactions on Power Electronics, 2016, 31(9):64-94.
[14] LAROCHE E, BOUTAYEB M. Identification of the induct-ion motor in sinusoidal mode[J]. IEEE Transactionson Power Electronics, 2010, 25(1): 11.
[15] YEPES A G, RIVEROS J A, Doval-Gandoy J, et al. Pa-rameter identification of multiphase induction mac-hines with distributed windings-Part 1: Sinusoidale-xcitation methods[J]. IEEE Transactions on EnergyConversion, 2012, 27(4): 1056.
[16] RIVEROS J A, YEPES A G, BARRERO F, et al. Paramete-r identification of multiphase induction machines with distributed windings—Part 2: Time-domain tec-hniques[J]. IEEE Transactions on Energy Conversi-on, 2012, 27(4): 1067.