一种半潜式污损生物清洗系统
2019-01-17 02:08秦亚军甘文兵戚战峰
机械管理开发 2018年12期
秦亚军, 甘文兵, 戚战峰, 曹 仲
(宜昌测试技术研究所, 湖北 宜昌 443000)
引言
在海洋中使用的舰艇水下表面容易附着生长海生物污损,严重时其厚度可达到5 cm以上,使船只的航行阻力明显增大,从而损耗更多的燃料,增加额外的航行时间。另外附着在其表面的污损生物也会破坏船体的防护涂层,因此对于生物污损需要及时清除。当前海生物污损清除主要是在干船坞中人工使用铲子、液压刷等工具进行清除,这些方法工作效率低,易造成船体材料和防护涂层损伤。空化水射流清洗设备,可达到高效无损的清洗效果,但是清洗作业需要潜水员长时间下水操作,水中操作难度大,工作效率偏低。因此有必要发明一种可在水面以上操作的空化清洗系统,在降低工人劳动强度的同时提高清洗工作效率,并能保证操作人员安全。
1 工作原理
该种清洗系统的工作原理是:利用半潜趸船搭载自适应的柔性空化清洗喷嘴模块,在趸船下潜状态下,将被清洗舰艇驶入趸船的中间位置,并使用缆绳固定。控制柔性水下清洗喷嘴模块升起并紧贴船底,高压水经空化喷嘴形成清洗的空化水射流,开始污损生物清洗,同时喷嘴模块在控制机构的推动下自船底首部向船尾运动,直至完成船底清洗。其特殊设计的喷嘴模块可自动适应船体表面曲线的变化,从而保障更好地清洗效果和效率。该清洗系统总体结构如图1所示。

图1 系统总体结构示意图
2 结构组成
该清洗系统的主要组成包括:半潜趸船、空化清洗设备,柔性空化喷嘴模块、喷嘴模块控制机构、辅助监控等。
其中半潜趸船为水下搭载平台。
空化清洗设备用于为水下喷嘴模块组提供一定压力和流量的高压水。主要由潜水泵、高压泵、压力流量控制部件、高压水输出管等组成。空化清洗设备是利用特殊结构的喷嘴使高压水射流在喷枪出口处时产生大量气化空泡并喷出,空炮溃灭时,周围水体向空泡凹陷的方向加速流动,产生微射流,微射流的速度很高,使其与被清洗面接触时压力可达成百上千兆帕,迅速将污损生物从船体表面剥离,由于微射流的尺度很小,因此适合清洗硬而脆的钙化质污损生物,而对船体本身伤害很小。
喷嘴模块控制机构用于驱动和调节喷嘴模块在水下姿态形状,并推动其沿船底表面运动,根据船底形状进行自适应调整。主要由减速电机、传动带,导轨、伸缩缸、滑架等组成。结构如下页图2所示。
空化喷嘴在工作时需要调整好与被清洗表面的距离和角度才能发挥最好清洗效果。因此为保证清洗效果和效率,需要设计相应机构对喷嘴的清洗角度和清洗的距离进行控制。柔性水下空化喷嘴模块(简称空化喷嘴模块)是将若干个空化喷嘴和定距胶轮、驱动扭簧固定于柔性铰链的每个链节和销轴上,使用时柔性铰链可根据船底轮廓在喷嘴模块控制机构和扭簧回弹力的作用下自动改变铰链弯曲的局部和总体形状,从而抱紧船体底板,带动各喷嘴定位于距离船底表面预定位置和角度处。并且当被清洗船体移动时这些喷嘴模块可自动适应船体轮廓变化。空化喷嘴可将高压水转换为空化水射流用于清洗污损生物。结构如图3、图4所示。
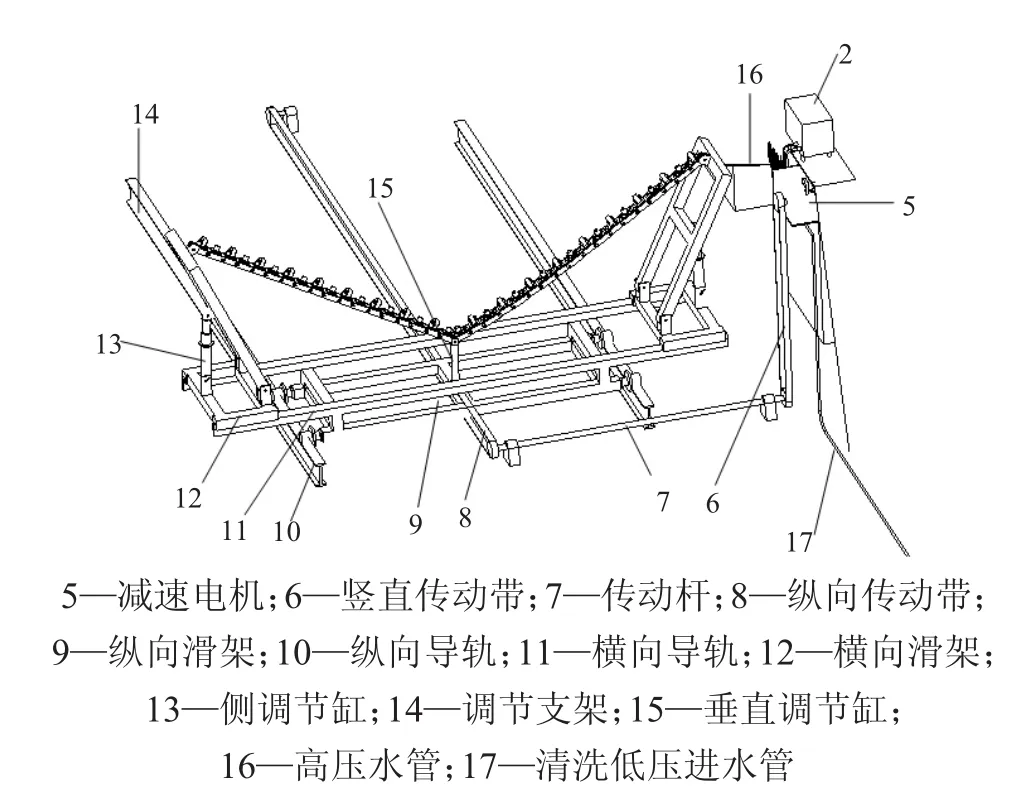
图2 喷嘴模块控制机构结构示意图

图3 柔性空化喷嘴模块结构及姿态调整示意图

图4 柔性喷嘴模块背面
监控设备包括控制台、水下摄像头、水下光源、主机等部件,主要用于实时观测水下污损生物清洗状态,控制清洗感端设备输出的高压水压力和喷嘴模块控制机构的动作速度。
其连接关系为,空化清洗设备干端和喷嘴模块控制机构的减速电机安装在多功能半潜趸船的上层甲板上(该甲板在趸船吃水最深时仍位于水面以上),喷嘴模块控制机构大部分安装在趸船底层甲板面上(该甲板层清洗船只污损生物时将沉入水面以下),空化喷嘴模块安装在喷嘴模块控制机构滑架的可调节支架上。其中滑架部分可在甲板上纵向、横向水平移动,配合其上驱动调节支架的液压控制缸,可在工作时控制喷嘴模块调整位置和姿态,以适应不同船型和船体表面形状变化的需要。空化清洗干端设备依靠潜水泵从趸船水面以下吸水,增压后通过高压管供给安装在调节支架上的空化喷嘴模块的空化喷嘴进行清洗工作。
3 工作过程
1)工作时将趸船1底层甲板潜入大于被清洗舰艇吃水线以下,再将被清洗舰艇驶入趸船1中间,使用缆绳从四角固定被清洗舰艇至趸船四角上。
2)启动减速电机5,将纵向滑架调节至被清洗舰艇船首部位正下方,调节中间液压缸15,使喷嘴模块4下部接触到船体底部,调节侧液压缸13,使喷嘴模块4依靠自身扭簧回弹的驱动和倾斜杆的牵引从而紧贴船体。
3)打开空化清洗干端设备2,高压水经高压水管16至空化喷嘴模块4转变为空化水射流,开始清洗。与此同时减速电机5动作,最终带动纵向滑架9从船头底部向船尾底部缓慢移动,同时垂直调节缸15和侧液压缸13根据其端部的传感器信号随时调节其行程,同时扭簧驱动各链节向船体表面回弹,使喷嘴模块4可以始终紧贴船体,从而使喷嘴处于最佳清洗距离和角度。直至喷嘴模块4从船体前部移至船尾,完成清洗。
4 结论
该水下自动清洗系统具有如下4个突出优点:
1)使用该系统进行清洗工作,操作人员只需在上层甲板上通过显控台的实时图像显示进行控制操作即可完成任务,无需下水作业,从而大大降低了清洗作业的劳动强度和保障了人员安全。
2)该清洗系统清洗端采用集成多个喷头的喷嘴链组进行清洗工作,可一次性清洗大面积的污损生物,大大优于使用潜水人员水下操作的普通空化清洗设备,所以工作效率大大提高。
3)空化喷嘴模块可适应不同船体表面自动调节清洗喷嘴位置和方向,可达到最佳的清洗效果和最快的清洗效率。
4)无需舰艇进入干船坞,船只在码头间歇时即可进行清洗工作。
猜你喜欢
计算机仿真(2022年9期)2022-10-25
流体机械(2022年8期)2022-10-13
火箭推进(2022年2期)2022-05-14
科海故事博览(2021年29期)2021-11-10
数学小灵通·3-4年级(2021年6期)2021-07-16
流体机械(2021年1期)2021-02-23
珠江水运(2020年19期)2020-11-04
资源节约与环保(2019年11期)2019-01-21
中国铸造装备与技术(2018年3期)2018-06-08
江苏船舶(2017年2期)2017-06-26