
反射式矩阵LED远光设计
2019-01-15 03:46吴杰邓亮
汽车零部件 2018年12期
吴杰,邓亮
(常州星宇车灯股份有限公司,江苏常州 213000)
0 引言
随着汽车数量的增多,交通安全越发引人关注,尤其是在夜间,重大伤亡交通事故频繁发生。据统计,国内夜间行驶量不到总量的1/3,却造成了70%以上的交通事故[1]。事故原因主要有:夜间的光线差、照明不良及会车时远光使用不当造成驾驶员眩目,其中远光使用不当占40%。因此,解决行车过程中远光引起的眩目,对提高夜间行车安全性,降低驾驶疲劳具有重要的意义[2-5]。
汽车远光防眩目方法可分为被动式防眩目法和主动式防眩目法。被动式防眩目法是在人眼处、前挡风玻璃处或其他光线传播过程的某处,对远光光线进行过滤或吸收处理以防止驾驶员眩目。主动式防眩目法实现远光初精细的照明区域控制,产生暗区避免炫目。本文作者介绍的反射矩阵式LED远光装置属于主动式防眩目法,通过9颗LED光源,按矩阵方式排列成LED阵列,在点亮时分别发射光束,这些光束经各自对应的光学反射镜反射,沿着各主照射方向在前方形成光亮区域,这些光亮区域可组合成预定的光分布(远光分布)。此模组有两种工作状态:当所有的LED都接通时,为普通远光照明状态,此时光分布满足法规GB 25991-2010要求;而当关闭一个或几个LED时,可以在前方特定的区域(来车或前车区域)形成“暗区”,此时为自适应无眩目远光照明状态,满足ECE R123要求。
1 前照灯远光配光系统设计
1.1 整体设计
该配光系统由9颗LED光源及6块自由曲面反射镜构成,其中LED光源按矩阵阵列排放,且每块反射镜对应1~2颗LED。
图1为左、右前照灯配光系统及其功能的示意图。
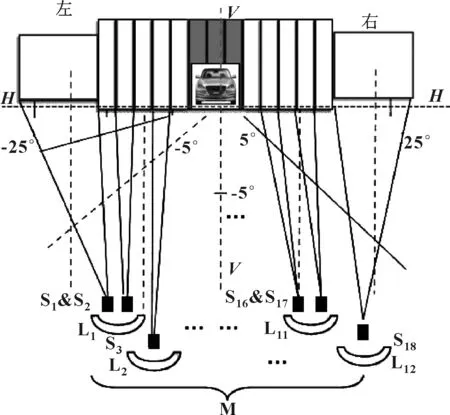
图1 前照灯配光系统及其功能的示意图
其中L为反射镜;S为光源;H-H线表示水平方向;V-V线表示垂直方向。由图1可见,左、右两个前照灯配光系统各有9颗LED发出光束,经由各自对应的反射镜反射,可在前方呈现9个光亮区域,组合形成远光分布。
1.2 反射镜种类的选取
汽车前照灯的反射系统一般可分为两种:抛物面反射式和自由曲面反射式。由抛物面的性质可知,当光源置于抛物面反射镜的焦点附近时,光源发出的光线经由反射镜反射,会沿着与抛物面主轴近乎水平的方向出射,即抛物面可将空间立体角内全部的光能量汇聚,以平行光出射,如图2所示。为实现照明区域分布,抛物面反射镜还需要配合配光镜。
自由曲面式反射镜上可分为多个子面,且各子面间曲率不连续或焦点不同。如图3所示,自由曲面与抛物面的区别在于,自由曲面可同时达到光线的偏移和散射目的。此矩阵LED远光模组中各反射镜对应一颗或两颗LED,即有两个焦点,且其出射的角度和展宽均不同,因此反射镜采用自由曲面式设计。
自由曲面反射镜的设计步骤为:(1)光源模拟的选取,导入光源;(2)基面选取及基础面的划分,根据实际配光需求对基础面进行划分;(3)各子面的光型精细调整,使边缘截止线清晰、光型方正且分布均匀。(4)各子面间的光顺与衔接。(5)设计的反射面输出到三维造型软件。
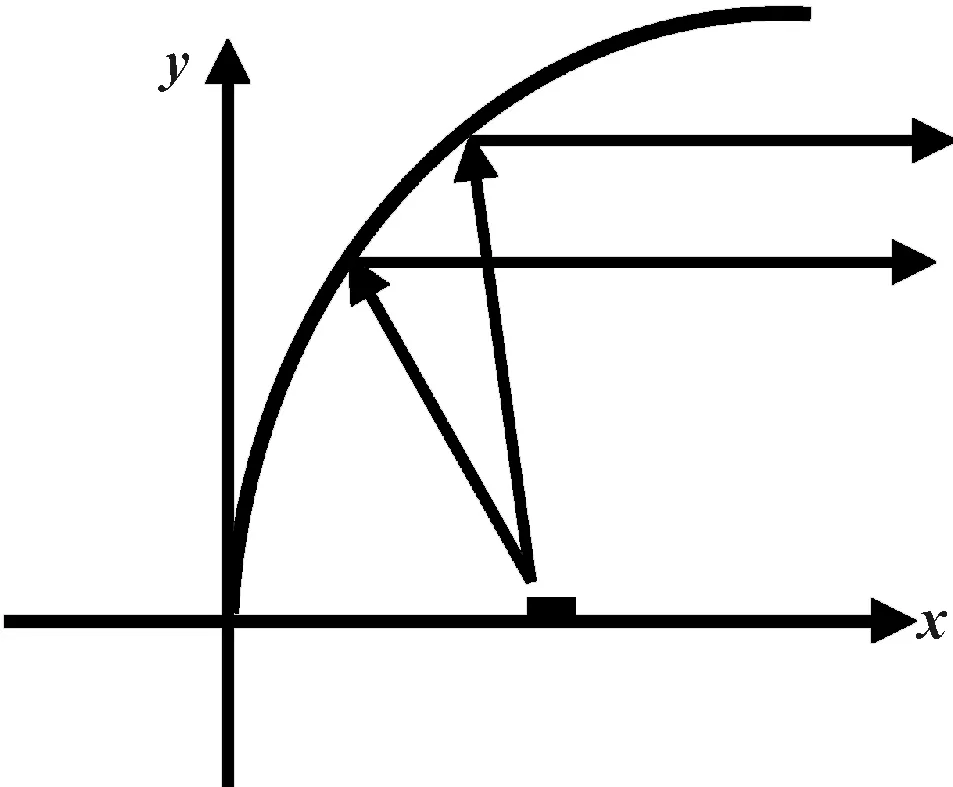
图3 自由曲面反射镜截面图

图2 抛物面反射镜截面图
1.3 自由曲面反射镜设计原理
图4为自由曲面反射镜光线追迹原理图。其中点O为光源中心点,点P为光源发出的一束光线与自由曲面反射镜的一个交点。假设点O的坐标为(xO,yO,zO),则其发出的光线的空间方程可表示为
(1)
式中:s为OP之间的距离;α、β、γ分别为点O发出的光线沿x轴、y轴、z轴的方向余弦。定义反射镜曲面在点P处的单位法向量为N(αN,βN,γN)时,则反射光线单位方向向量为
(2)
式中:iO为光线的入射角,则有:
cosiO=ααN+ββN+γγN
(3)
当已知点P的坐标(xP,yP,zP),又可求得经反射镜反射后的光线空间方程:
(4)
式中:s1为点P到屏幕上目标点Q的距离值。由式(1)—(4)可知,一旦反射镜面的位置及形状固定,点O至反射镜曲面任一点的单位方向向量、距离和其在反射镜曲面的单位法向量都已确定,由点O坐标可计算得到点P的坐标值,再确定前方测试屏幕的距离,即可获得点Q坐标值。
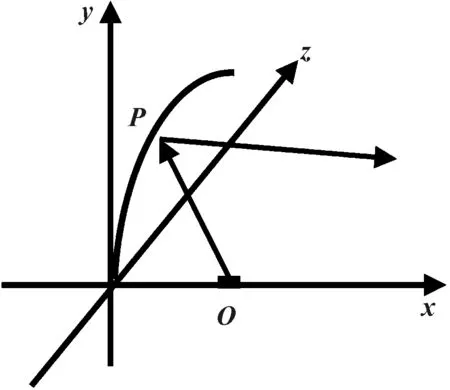
图4 自由曲面反射镜光线追迹原理图
1.4 反射镜校准设计
在LED光源贴片时,总会存在误差,即光源离焦量,离焦量对光线偏移的影响较严重,因此必须进行LED的容差分析,以二维抛物线为例进行分析,如图5所示。

图5 离焦量对光型偏移影响
图5中点O为抛物线焦点处的光源,点O1为偏移Δx后的光源位置,点A、B分别为光源O与O1发出的相平行的光与抛物面的交点,反射后分别到达接收屏的点C和点D,l为抛物线在点B处的法线。当抛物线方程、偏移量Δx、点A坐标值已知时,点A、B、E的坐标值都可以通过简单方程联立计算求得。
现假设点A坐标为(x,y),点B坐标为(x1,y1),点E坐标为(x2,y2),屏距离y轴为x3,那么光线在屏上的偏移量Δy:
(5)
通过式(5)可以得到轴向的离焦量引起光线的偏移值。同样,可以通过简单的数学模型观察计算其他方向的离焦量对光线偏移的影响,这里不做赘述。由图6可以更直观地观察反射镜与光源的相对偏差对光型的影响,可见光源轴向或左右偏移0.3 mm和0.6 mm时,光型的形状和位置都发生了明显的失真。
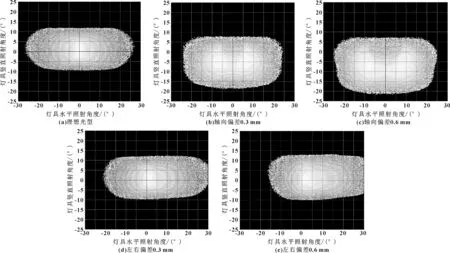
图6 反射镜与光源的相对偏差对光型的影响
该模组对反射镜的定位精度及LED的贴片精度有很高的要求,在实际生产过程中,需要设计专用设备修正光学误差。
2 系统建模与仿真
通过LucidShape光学仿真软件对配光系统进行建模和仿真,为方便反射面的微调,建模时需要单独设计每个反射镜。图 7(a)、(b)、(c)分别为左前照灯中部分LED的子光型分布图。

图7 前照灯部分LED的子光型分布图
由图7可知,每颗LED照明的角度区域都不同,L4光分布的最大照度为48.9 lx;L5光分布的最大照度为51.3 lx;L6光分布的最大照度为59.1 lx。通过这些子光分布的排列组合,可形成多种无眩目光分布。
当9颗LED全部点亮时,各LED产生的子光型组合形成普通远光分布,如图8所示。

图8 左前照灯普通远光分布图
由图8可知,该光型边缘截止线较清晰,照度值较高。为进一步了解此普通远光分布情况,对其进行法规点模拟测试,可得表1中结果,可知普通远光满足GB 25991-2010法规要求。其中H,V测试点为屏幕照度分布的(0,0)处,H2-H3、H1-H4为法规测试区域。

表1 普通远光的法规测试结果 lx
在前照灯系统处于无眩目远光模式时,前置图像传感器会自动检测前方道路情况,当检测到前方有其他车辆时,会将位置信号传递给控制器,由控制器关闭相应的LED,使得前方车辆处于前照灯照明范围之外,避免驾驶员产生眩目,增加行车安全性。图9为含“暗区”的无眩目光分布的两种视角,其中图9(a)为俯视视角;图9(b)为驾驶员视角。
由图9中两种视角可以明显看出,该模组产生的无眩目光光分布截止线清晰,分布均匀,总体效果较好。参考欧盟ECE法规,对此前照灯产生无眩目光分布作模拟测试,具体如表2所示。
表2中α、β分别表示前方测试屏水平和垂直方向的角度值,且图中只列出了右行交通情况下的测试结果值。由表2中结果可见,该无眩目光分布满足ECE法规中的要求,防眩目效果较好。值得一提的是,该前照灯可产生30多种有效的无眩目光分布,基本满足道路行驶的需求。

图9 无眩目光分布图
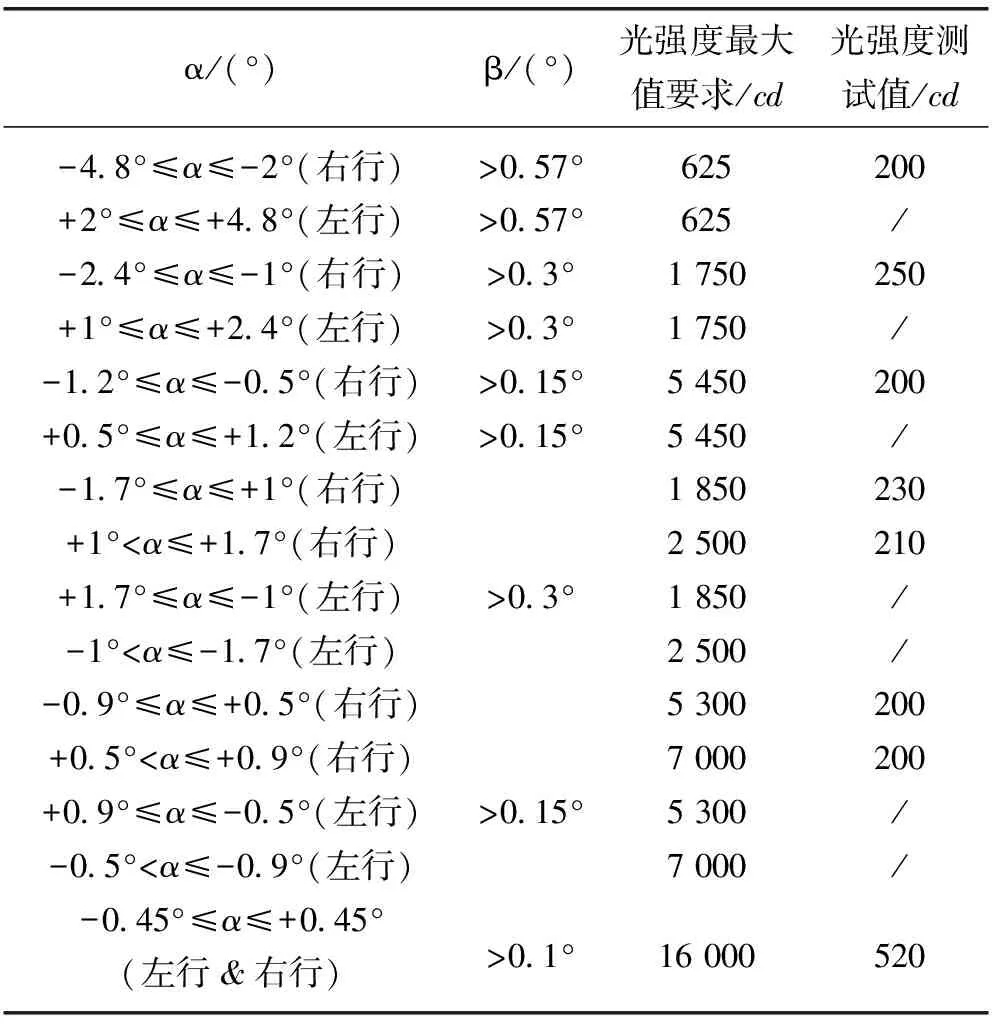
表2 无眩目光分布的法规测试结果
注:“-”表示光线偏离基准线向左照射,“+”表示光线偏离基准线向右照射。
3 结束语
介绍并设计了一种基于反射的矩阵式LED前照灯,既可产生普通远光照明分布,又可通过控制各LED的通断产生无眩目光分布,并提出了一种反射镜的位置可调的结构,可以得到最优化的光型分布,防止生产制造误差引起光型过差。通过LucidShape光学软件进行仿真,仿真结果表明:普通远光分布满足法规GB 25991-2010要求,且可实现多种含“暗区”光分布,达到防眩目的效果;满足ECE R123法规要求,可供防眩目前照灯设计参考。
猜你喜欢
新能源科技(2022年9期)2022-11-20
时代汽车(2022年17期)2022-09-06
汽车维护与修理(2022年1期)2022-06-28
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
科学与技术(2019年12期)2019-03-29
汽车技术(2019年2期)2019-03-04
汽车维护与修理(2018年19期)2018-04-28
卷宗(2017年16期)2017-08-30
科学时代·上半月(2013年9期)2013-09-16
