
基于几何特征与三维点云特征的道路边沿识别算法
2019-01-14 02:46陈俊吉皮大伟谢伯元王洪亮王霞
河北科技大学学报 2019年6期
关键词:传感器技术
陈俊吉 皮大伟 谢伯元 王洪亮 王霞
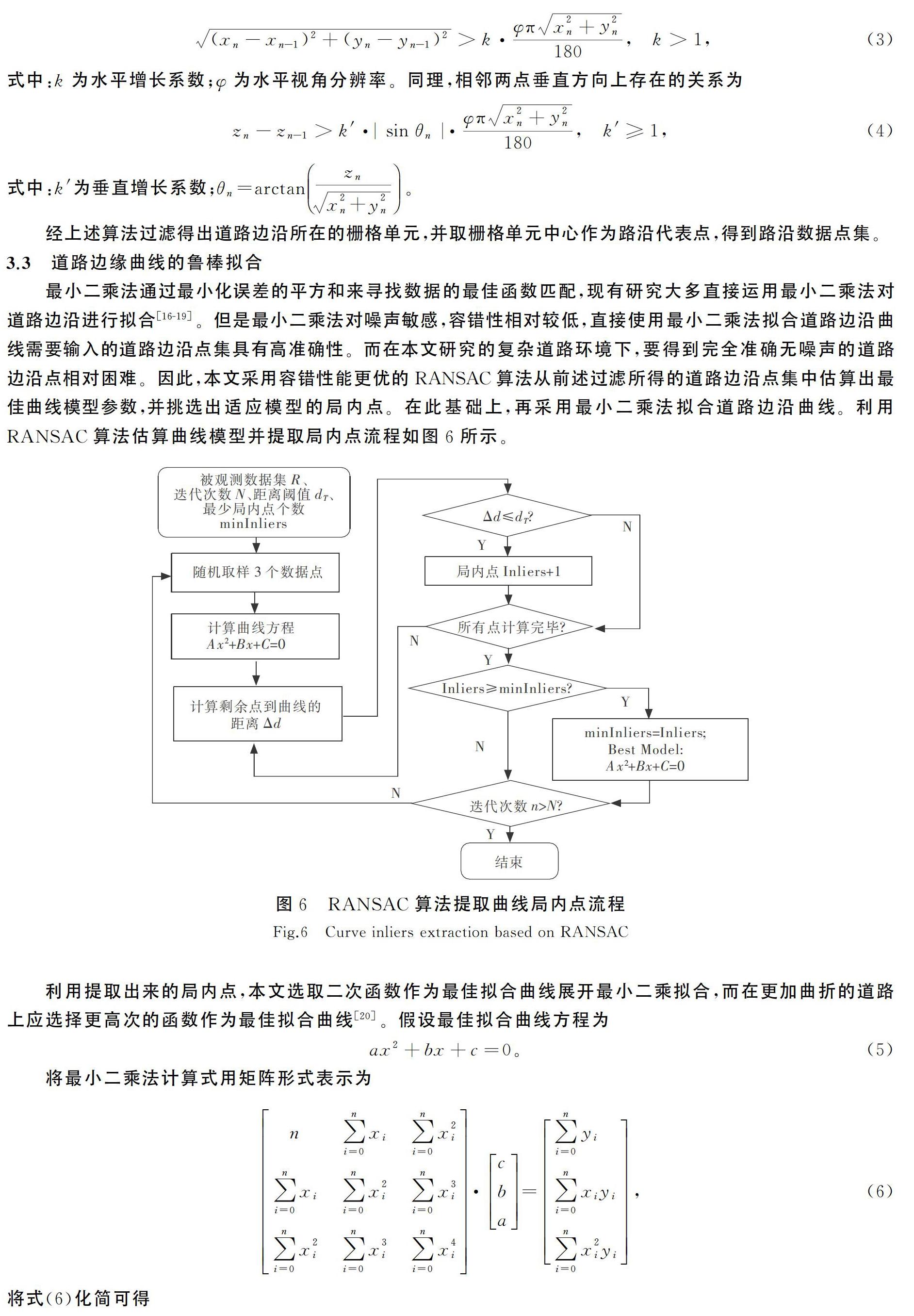
摘 要:针对目前典型道路边沿识别算法存在实时性与可靠性难以兼顾的问题,基于多线激光雷达,根据道路边沿的几何特征与三维点云特征,提出了一种权衡实时性与可靠性的道路边沿识别算法。依据多线激光雷达扫描获取的大量点云数据,基于RANSAC算法的地面分割方法,滤除了预设感兴趣区域内的地面数据点,然后将剩余的无序点进行有序栅格化投射处理,根据道路边沿区域的几何特征与点云分布特征进行匹配筛选,再融合RANSAC的最小二乘法,以完成道路边沿曲线的鲁棒拟合。实验表明,算法在直道和弯道场景识别准确率均大于95%,耗时均低于15 ms,具有良好的准确性和实时性。所提算法能有效识别道路边沿,可为智能车可行驶区域的识别及控制提供理论参考与方法依据。
关键词:传感器技术;智能车辆;道路边沿;几何特征;三维点云;融合RANSAC
中图分类号:TN958.98 文献标志码:A doi:10.7535/hbkd.2019yx06002
Abstract:Typical curb recognition algorithms have difficulty in balancing real-time performance and reliability. In this paper, with a multi-line LiDAR used, a curb recognition algorithm based on geometric features and 3D point cloud features of curb areas is proposed, which reaches a tradeoff between real-time performance and reliability. Faced with the large amount of point cloud data, the algorithm firstly proposes a ground segmentation method based on RANSAC algorithm, filtering out the ground points in the preset region of interest, and then the orderly rasterization of the remaining disordered points is carried out for matching and screening curb areas according to the curb's geometric characters and the points' distribution feature. After that, the least square method fused with RANSAC is proposed to achieve the robust fitting of curb curve. Experiments show that the recognition accuracy of the algorithm is more than 95% in both straight and bend scenes, and the time-consuming is less than 15 ms, which indicates the good accuracy and real-time performance of the proposed algorithm.The algorithm can effectively identify road curb, thus providing a theoretical reference and method basis for intelligent vehicle driving area recognition and its' control.
Keywords:sensor technology; intelligent vehicle; curb; geometric characters; 3D point cloud; fusing RANSAC
隨着现代科技的快速发展,汽车产业在智能化方向不断推陈出新,道路边沿识别是智能车辆在环境感知环节中的一项重要研究内容。将感知环境分为道路区域和非道路区域,可为车辆可行驶区域划分及其路径规划提供更为准确的道路区间,对减少后续计算量、提高环境感知的实时性能等有着重要意义。
目前,大量传感器可以用来搜集道路信息,感知智能车辆的行驶环境[1-3]。常用的路沿检测方法主要有基于视觉传感器的方法、基于激光雷达的方法、视觉和激光雷达融合的方法。相比之下,视觉传感器具有低成本和易用性的特点。随着机器视觉技术的发展,摄像头被广泛用于道路边沿的检测识别。陈敬义等[4]将CMOS摄像头获取的图像灰度化,通过自适应Otsu法二值化分割出道路信息并利用Canny算子提取道路边沿;PANEV等[5]用装有鱼眼镜头的单目前视相机采集图像,从中提取HOG特征,利用SVM分类器结合高度和相对车辆的距离等信息来提取道路边沿,并在时域内进行跟踪筛选,取得了较好的效果。但视觉传感器易受环境光线和天气的影响,对于在室外运作的智能车辆,基于视觉的路沿识别算法稳定性较差。激光雷达受环境和天气影响较小,同时相对于单线的二维激光雷达,多线的三维激光雷达能够获取包括三维坐标在内的更多目标信息,因此三维激光雷达在道路边沿识别方面的应用也受到了许多研究人员的关注。典型的有动态轮廓模型(active contour model)——Snake模型,其常被用来从图像或是三维点云投射的图像中提取道路边沿[6-8],但Snake模型中的能量函数需要提供一个轮廓位置,且将三维点云投射之后会损失三维信息而降低提取效果。XU等[9]利用3D激光雷达点云反射强度信息提出用能量函数进行路沿点预选,再利用最低成本路径模型进行路沿的优化拟合。段建民等[10]基于四线激光雷达数据,利用区间共线点提取算法提取路沿数据点,并改进DPCA算法对路沿数据点聚类,采用最小二乘法线性拟合实际路沿。但基于能量或是基于聚类等的复杂算法通常伴随着实时性的损失,不利于智能车辆的行驶安全。此外,不少研究根据道路边沿的高度、宽度、坡度等几何特征进行识别提取[11-13],在面对一些复杂的道路环境时,如道路两旁地势起伏、植被丛生,即道路两旁的非路区域也存在相同几何特征的情况,但是仅基于几何特征算法的可靠性会大大降低。
2 道路模型
智能车辆行驶道路情况复杂多变,针对目前路沿识别存在的一些问题,本文假设所处理的道路路面满足以下要求:
1)道路边界为规则直线或曲线;
2)道路区域路面基本平坦,道路区域的高度一致性大于道路区域和非路区域之间的高度一致性;
3)道路区域与非路区域有一定的高度差,即道路区域与非路区域间有人造路沿、围墙等明显界限。
本文實验选择的道路场景为园区道路,包含直线路段和弯曲路段,且满足以上要求。图2所示为理想直道模型,激光雷达的圆形扫描线在道路边沿处发生弯折变化,且交界面上的各扫描点间距与路面各点间距不同,其连线的斜率基本一致,即各点基本在同一条线段上。相比之下,图3所示的弯道模型中,由于道路区域与非路区域交界面为曲面,因此其上各扫描点连线斜率不再保持一致,呈曲线分布。
对于智能车辆实际行驶的园区道路,除了道路区域与非路区域具有高度差、坡度变化等几何特征,其非路区域的高度一致性也相对较差,地势起伏和栽种的植被都具有一定的高度差、坡度变化等,但非路区域的不规则起伏或是植被的参差缝隙等都会使得雷达返回点在空间上存在跳跃性,故应将道路边沿的几何特征与边沿面上扫描点的分布特征结合起来,才能较为准确地识别出路沿区域。
3 道路边沿识别算法
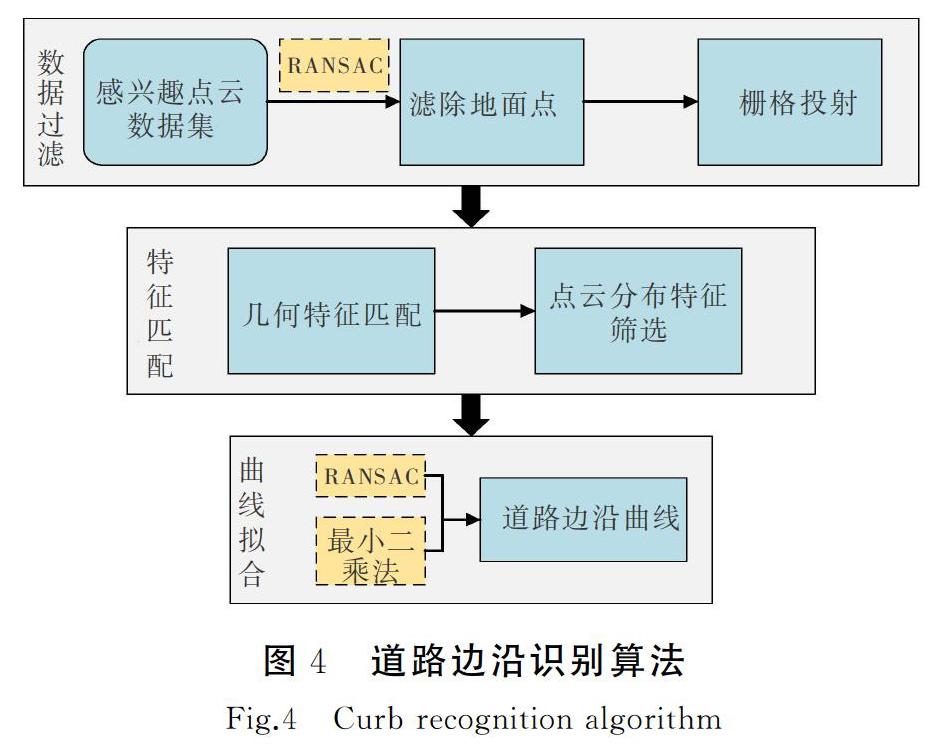
根据道路模型特征,从激光雷达数据预处理后得到的感兴趣点云集合中挑选出道路边沿点,如图4所示。本文先采用基于RANSAC(random sample consensus)算法的地面分割方法将点云集合中的地面点滤除,再将剩余点投射到栅格空间中。通过对栅格单元简单几何特征匹配的初选,得到道路边沿所在的预选区域。在预选区域中进行点云分布特征的过滤,得到含有极少噪声点的道路边沿点,最后结合RANSAC算法和最小二乘法进行道路边沿的拟合。
3.1 基于RANSAC的地面点过滤
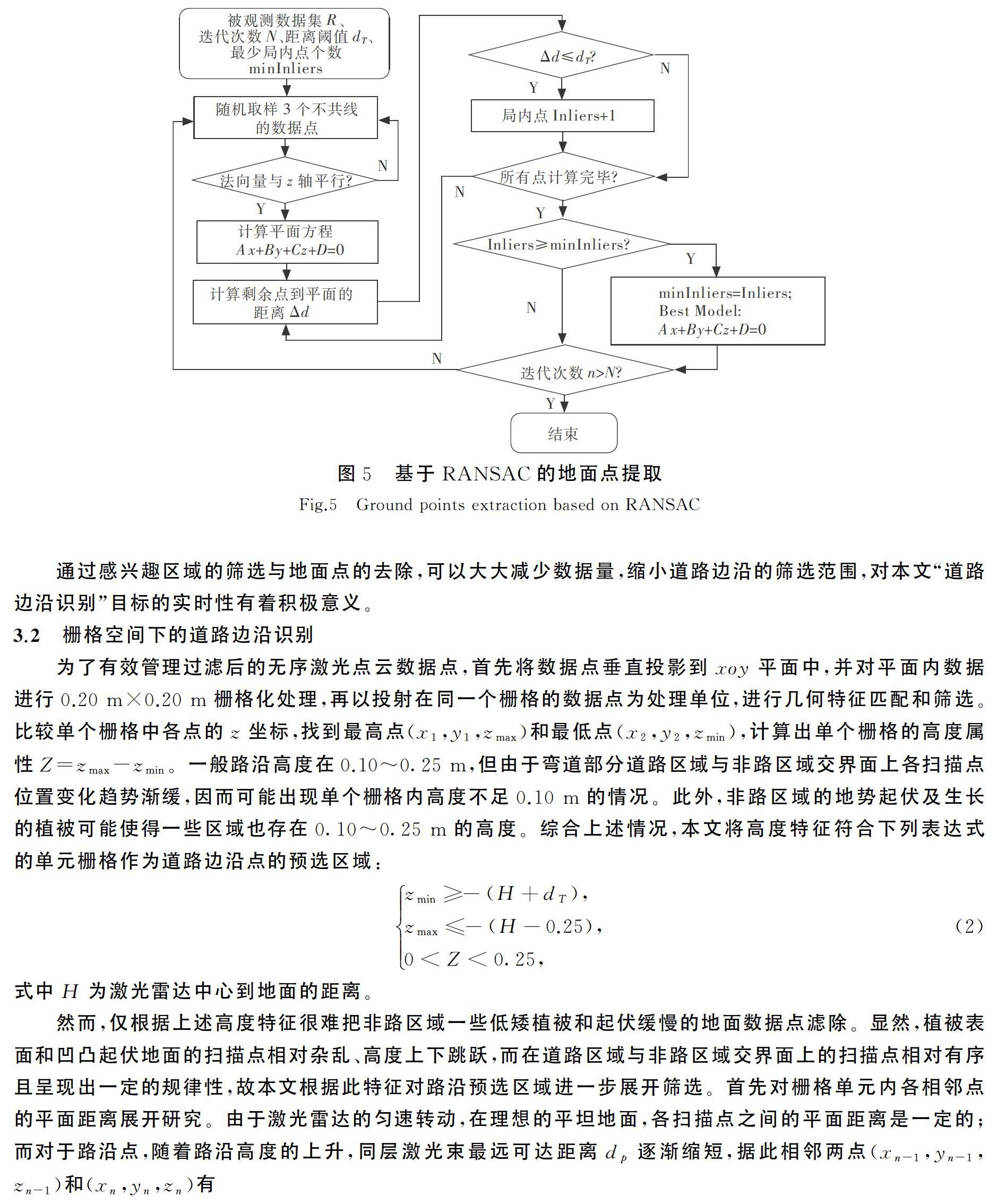
路面畅通、路边无停驻行人和车辆时,可以直接通过找出地面点,求解其边缘从而得到道路边沿。但当路边有较多行人、车辆等遮挡时,就无法再通过这种方法得到准确的道路边沿,路面点成了无效的噪声点。因此,本文首先将感兴趣区域内的地面点滤除,进一步缩小了道路边沿点所在的数据集。RANSAC算法是一种鲁棒的模型拟合算法,其通过迭代方式,从一组包含离群点的被观测数据中估算出数学模型的参数[14-15]。道路面是一个相对平坦的平面,通过RANSAC算法可以较好地实现路面模型提取,算法流程如图5所示。考虑路面可能存在的小石块及小坑洼等,取距离阈值dT=0.03 m,通过RANSAC算法筛选出地面距离阈值范围内的全部局内点,并将其过滤掉。
4 实验验证
根据本文所提算法,选择如图7所示的直道与弯道场景进行实验验证。
在直道实验中,图8 a)显示的原始点云包含了路面点、路沿点、路上行人、周围树木、草坪、座椅等,是一个有着大量噪声点的数据集合。图8 b)所示点集是根据激光雷达安装位置通过高度特征(-H±dT)筛选的路面点,图8 c)是本文基于RANSAC筛选出的路面点,可以看出,本文所提方法在路面分割完整度、准确度及路沿保留完整度方面都优于直接根据高度筛选的结果。图8 d)为单独采用最小二乘法对算法所选点进行拟合的结果,其左侧由于存在少量没有过滤完全的噪声点,左侧拟合路沿比实际路沿偏左,最大宽度达8.13 m,准确率为97.17%,耗时6 ms。图8 e)显示了应用本文算法对直道路沿识别拟合的结果,可以看到,识别结果与实际左右路沿都具有较高的吻合度,数据显示拟合的道路宽度为7.78 m,而实际道路宽度为7.90 m,识别准确率为98.48%,在Intel(R) Pentium(R) CPU G3200 @3.00 GHz处理器上单次识别处理耗时7 ms。可见,在直道路沿识别中,本文算法具有更高的准确性,虽然牺牲了一点实时性,但仍能满足智能车辆的行驶要求。
针对图7 b)显示的弯道路沿实验场景,其左侧道路边沿存在一块缺角,图9所示为对应的实验结果。同样地,可以看到在图9 a)原始点云中包含了路面、路沿、行人、灌木、草坪等。图9 b)和图9 c)为不同方法下提取地面的效果图。显然,在弯道场景下,本文所用的基于RANSAC的地面分割方法在地面识别完整度和准确度方面都高于直接利用高度特征分割的方法。如图9 d)所示,利用最小二乘法进行道路边沿拟合,由于要尽量满足所有筛选出来的路沿点,其中包含了路边缺角引入的噪声点,因而所得到的拟合结果与实际路沿有着明显的偏差,拟合所得道路宽度最大可达9.12 m,准确率为86.62%,处理耗时10 ms。而本文采用融合了RANSAC的最小二乘法拟合出的道路边沿与实际路沿基本贴合,拟合的道路宽度为8.26 m(实际道路宽度为7.90 m),识别准确率为95.64%,处理耗时12 ms,如图9 e)所示。相比之下,本文所提算法虽然在融合RANSAC算法进行拟合时消耗了一定的时间,但得到的准确率明显更高,而所消耗的时间也满足智能车辆环境感知的实时性要求。
综合上述实验可知,相比直接根据高度分割地面的方法,本文所提出的基于RANSAC算法的地面分割方法有着更高的完整度和准确度,所采用的道路边沿识别及拟合算法在直道和弯道场景下均具有较高的准确性和良好的实时性。尤其在部分路沿不连续的场景下(如本文弯道场景),实际路边的缺角不连续部分的数据点在采用算法拟合的时候被作为局外点去除,最终得到的道路边沿准确度明显优于仅通过最小二乘法拟合的结果,可见本算法具有优良的可靠性。
5 结 语
本文利用三维激光雷达传感器,基于道路边沿的几何特征与激光点云的分布特点,提出了一种道路边沿识别算法,采用基于RANSAC的地面分割方法滤除感兴趣区域内的路面点,有效减少了识别中的噪声点。通过栅格投射,将无序点变成有序集合单元,通过分析栅格单元的几何特征及单元中点的分布特点,筛选出道路边沿区域。通过融合RANSAC的最小二乘法进一步降噪优化,拟合出道路边沿曲线。本文算法采用了多次降噪筛选,具有较好的鲁棒性。同时实验表明,无论是在直道还是在弯道场景下,本文算法均具有良好的准确性与实时性,符合智能车辆的行驶需求。
本文主要针对平坦的结构化道路进行了道路边沿识别算法的实现与实验,未来还需完善更多类型的道路边沿识别,如起伏道路、非结构化道路等,以提升算法在多场景中的适应性。
参考文献/References:
[1] LUNDQUIST C, SCHN T B, GUSTAFSSON F. Situational awareness and road prediction for trajectory control applications[J]. Handbook of Intelligent Vehicles, 2012:365-396.
[2] 王科.城市交通中智能車辆环境感知方法研究[D].长沙:湖南大学,2013.
WANG Ke. Environment Perception Method of Intelligent Vehicle in Urban Traffic[D]. Changsha: Hunan University, 2013.
[3] 王俊.无人驾驶车辆环境感知系统关键技术研究[D].合肥:中国科学技术大学,2016.
WANG Jun. Research on Technology of Unmanned Vehicle Perception System[D].Hefei: University of Science and Technology of China, 2016.
[4] 陈敬义,方博文,张晓东.直线道路识别实用性的优化分析[J].机械设计与制造,2019(2):241-244.
CHEN Jingyi, FANG Bowen, ZHANG Xiaodong. The analysis of optimization of utility for linear lane detection[J]. Machinery Design & Manufacture, 2019(2):241-244.
[5] PANEV S, VICENTE F, FERNANDO D L T, et al. Road curb detection and localization with monocular forward-view vehicle camera[J]. IEEE Transactions on Intelligent Transportation Systems, 2018,99:1-17.
[6] MARIKHU R, DAILEY M N, MAKHANOV S, et al. A family of quadratic snakes for road extraction[C]//Asian Conference on Computer Vision.Heidelberg: Springer, 2007: 85-94.
[7] RODRGUEZ-CUENCA B, GARCA-CORTS S, ORDEZ C, et al. An approach to detect and delineate street curbs from MLS 3D point cloud data[J]. Automation in Construction, 2015, 51:103-112.
[8] KUMAR P, MCELHINNEY C P, LEWIS P, et al. An automated algorithm for extracting road edges from terrestrial mobile LiDAR data[J]. ISPRS Journal of Photogrammetry & Remote Sensing, 2013, 85(11):44-55.
[9] XU S, WANG R, ZHENG H. Road curb extraction from mobile lidar point clouds[J]. IEEE Transactions on Geoscience & Remote Sensing, 2016, 55(2):996-1009.
[10] 段建民,李帅印,王昶人,等.基于激光雷达的道路边界与障碍物检测研究[J].应用激光,2018,38(6):1000-1007.
DUAN Jianmin, LI Shuaiyin, WANG Changren, et al. Detection of road boundaries and obstacles based on Lidar[J].Applied Laser, 2018,38(6):1000-1007.
[11] KELLNER M, HOFMANN U, BOUZOURAA M E, et al. Laserscanner based road curb feature detection and efficient mapping using local curb descriptions[C]//17th International IEEE Conference on Intelligent Transportation Systems (ITSC). Qingdao: IEEE, 2014: 2602-2609.
[12] 李广敬,鲍泓,徐成.一种基于3D激光雷达的实时道路边缘提取算法[J].计算机科学,2018,45(9):294-298.
LI Guangjing, BAO Hong, XU Cheng.Real-time road edge extraction algorithm based on 3D-Lidar[J].Computer Science, 2018,45(9):294-298.
[13] 谭宝成,严征.基于激光雷达的道路边界检测的研究[J].电子设计工程,2015,23(17):80-82.
TAN Baocheng, YAN Zheng. A study on a road edge detection based on laser radar[J]. Electronic Design Engineering, 2015,23(17):80-82.
[14] SCHNABEL R, WAHL R, KLEIN R. Efficient RANSAC for point-cloud shape detection[J].Computer Graphics Forum,2007, 26(2): 214-226.
[15] 周春霖,朱合華,李晓军.随机抽样一致性平面拟合及其应用研究[J].计算机工程与应用,2011,47(7):177-179.
ZHOU Chunlin, ZHU Hehua, LI Xiaojun. Research and application of robust plane fitting algorithm with RANSAC[J].Computer Engineering and Applications, 2011,47(7):177-179.
[16] 邹乐强.最小二乘法原理及其简单应用[J].科技信息,2010(23):282-283.
[17] 王晓原,孔栋,孙亮,等.基于32线激光雷达的道路边界识别算法[J].科技通报,2018,34(9):148-153.
WANG Xiaoyuan, KONG Dong, SUN Liang, et al. Road boundary identification algorithm based on 32 line laser radar[J]. Bulletin of Science and Technology, 2018, 34(9): 148-153.
[18] 李强,杜煜.基于3D激光雷达道路边缘实时检测算法的研究与实现[J].计算机应用与软件,2017,34(10):219-222.
LI Qiang, DU Yu. Research and implementation of real-time road edge detection algorithm based on 3D lidar[J]. Computer Applications and Software, 2017, 34(10): 219-222.
[19] HATA A Y, OSORIO F S, WOLF D F. Robust curb detection and vehicle localization in urban environments[C]//2014 IEEE Intelligent Vehicles Symposium Proceedings. Dearborn:IEEE, 2014: 1257-1262.
[20] 张永涛,贾延明.最小二乘法中代数多项式曲线拟合的分析及实现[J].计算机与数字工程,2017,45(4):637-639.
ZHANG Yongtao, JIA Yanming. Analysis and program implementation of least squares polynomial curve fitting[J]. Computer & Digital Engineering, 2017, 45(4): 637-639.
猜你喜欢
科学与财富(2017年1期)2017-03-17
环球人文地理·评论版(2016年9期)2017-03-15
商情(2016年51期)2017-03-05
科技资讯(2016年28期)2017-02-28
卷宗(2016年10期)2017-01-21
中国新技术新产品(2017年2期)2017-01-20
考试周刊(2016年78期)2016-10-12
求知导刊(2016年15期)2016-08-15
考试周刊(2016年47期)2016-06-29
