激光威胁下电视导引头优先跟踪方式研究
2019-01-14 03:39:02朱战飞韩新文杨树涛郭恩泽
火力与指挥控制 2018年12期
朱战飞,韩新文,杨树涛,郭恩泽
(中国洛阳电子装备试验中心,河南 洛阳 471000)
0 引言
电视制导工作在可见光波段,具有隐蔽性好、目标识别度高、制导精度高、抗电磁干扰能力强等优点,这些优点使电视制导武器在精确制导武器中占有重要地位,并表现出巨大的作战潜力[1]。为应对这种精确制导武器威胁,采用激光作为杀伤源对其导引头进行软杀伤已成为一种极为实用、高效、普遍的对抗手段[2]。文献[3-7]针对导引头核心部件CCD光电探测器,开展了未加成像跟踪系统条件下激光对CCD的作用机理、损伤现象及干扰效果等研究。在此基础上,本文以某电视导引头模拟器为实验对象,通过模拟打击可见光合作目标,研究导引头在不同跟踪模式下激光的干扰效果,并给出不同功率激光信号威胁下导引头跟踪的优先选择方式。
1 电视导引头工作原理
电视导引头是以电视摄像机为传感器的被动制导系统,跟踪原理[8]框图如下页图1所示。工作中,外界视场内的目标和背景(三维图像)的光能,经大气传输进入镜头聚焦,成像在摄像管靶面上(二维图像)。因目标和背景的光能反差不同,在靶面上形成不同的电位起伏,通过电子束的水平(行扫描)和垂直(场扫描)扫描将电位抹平,此时靶面输出与抹平电位成比例的视频信号电流(一维时间t的函数)。如果把行、场扫描正程的中心作为零点,那么由目标形成的行、场视频信号相对于行、场正程中心出现的时间,就可确定目标水平位置偏差±Δx和俯仰位置偏差±Δy。测量位置偏差的任务由视频跟踪处理器中的误差鉴别器自动完成,鉴别器把测得相对扫描正程零点(也称光轴)的位置偏差变成误差电压(或数字信号)。该信号加于伺服系统,经多次负反馈控制,迅速地使电视导引头的光轴对准目标,进而实现对目标的跟踪。

图1 电视导引头跟踪原理框图
2 实验方法
2.1 实验系统组成
参试设备主要包括:某电视导引头模拟器1套、某激光信号发射器1台、可见光合作目标1套、红外信标源1台。
其中:电视导引头模拟器(以下简称导引头)由电视摄像分系统、图像处理分系统、计算机与操控分系统、伺服及稳像平台等部分组成,CCD的靶面尺寸为4.8 mm×3.6 mm,变焦范围为15 mm~150 mm,跟踪模式包括点跟踪、质心跟踪、相关跟踪和自适应跟踪等,考虑到当前导弹成像制导系统中主要采用质心跟踪、相关跟踪两种模式[9],并结合合作目标的特点及所处环境,实验中导引头跟踪模式确定为质心跟踪与相关跟踪。导引头在工作过程中,视频显示界面如图2所示,图中跟踪模式代号中:03代表质心跟踪,05代表相关跟踪。
激光信号发射器为半导体激光器,波长范围为0.7 μm~0.95 μm,束散角为 0.64 mrad,功率为低高两档:1 W、200 W。
可见光合作目标作为导引头的模拟打击目标,尺寸为10 m×6 m×6 m。

图2 电视导引头模拟器图像显示界面
红外信标源主要生成波长为3 μm~5 μm的红外信号,模拟导弹尾焰的红外辐射特征。
2.2 实验布局设计
导引头采取高点配置,对准可见光合作目标方向;红外信标源配置在导引头附近,用于引导或指示激光信号发射器准确瞄准导引头。
激光信号发射器与可见光合作目标采取低处配置,其中激光信号发射器距离导引头约10 km,可见光合作目标距离激光信号发射器约55 m,激光信号发射器、可见光合作目标与导引头保持通视状态。实验布局如图3所示。

图3 激光干扰电视导引头模拟器实验布局图
3 实验现象及结果分析
3.1 低功率激光干扰实验
3.1.1 质心跟踪模式下激光干扰
1)在焦距为90 mm的情况下,导引头采用质心跟踪模式锁定目标,而后激光信号发生器对准导引头方向发射1 W激光干扰信号。实验结果:受到激光干扰后,导引头光轴的方位、俯仰偏差发生较大变化,目标丢失、干扰有效,如下页图4所示。
2)导引头同样采用质心跟踪模式,焦距从90mm增大至150 mm,锁定目标后激光信号发生器对准导引头方向发射1 W激光干扰信号。实验结果:导引头保持稳定跟踪目标、干扰无效,如下页图5所示。

图4 焦距为90 mm时质心跟踪模式下导引头工作画面
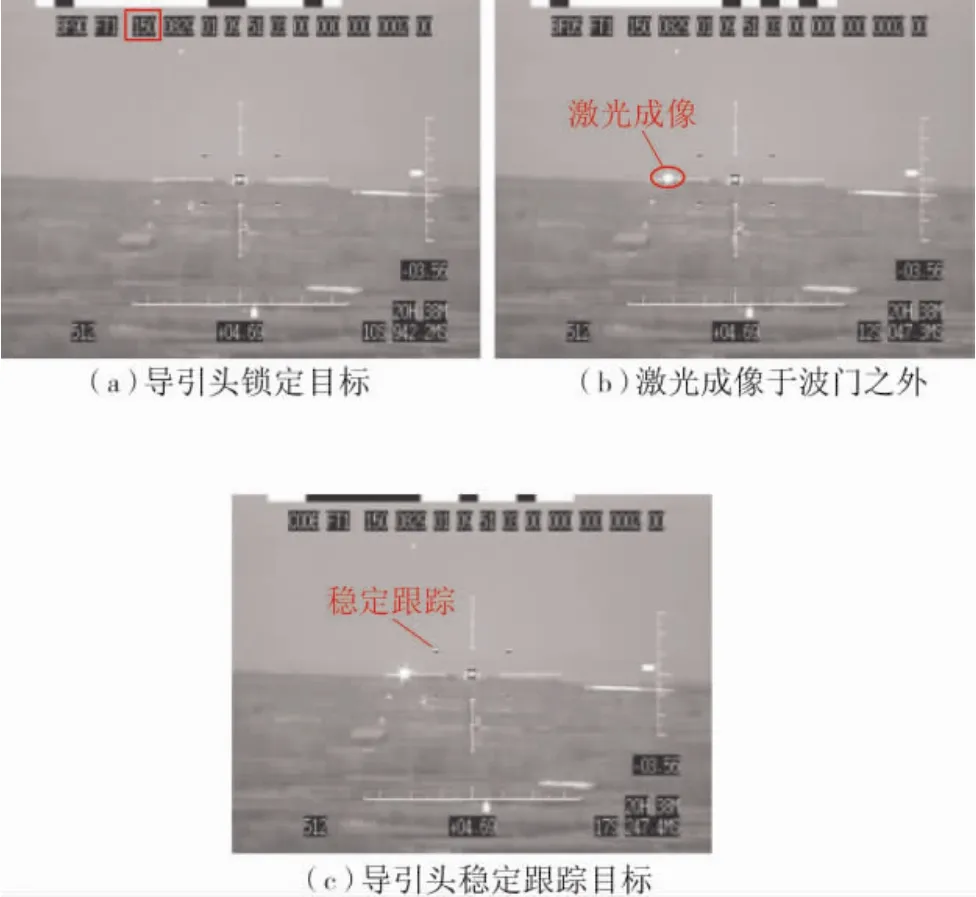
图5 焦距为150 mm时质心跟踪模式下导引头工作画面
原因分析:质心跟踪采用的是利用目标和背景的对比度来识别和提取目标信号的对比度跟踪算法,主要通过计算波门内目标的质心(xc,yc)来获取跟踪点,其中,。跟踪过程中,图像处理系统只对波门内的视频信号进行处理,并通过波门套住目标图像。由图4、图5可知,当焦距为90 mm时,干扰激光在导引头CCD探测器的成像位于波门附近,且亮度高于目标亮度,此时干扰激光的成像将和波门内的目标图像一起参与质心运算,从而使质心偏离原来的跟踪点,造成导引头目标丢失。而当焦距增大至150 mm时,导引头视场随之减小,此时干扰激光的成像处于波门之外,图像处理系统不对其进行信号处理,因而导引头能够继续稳定跟踪目标。
3.1.2 相关跟踪模式下激光干扰
1)焦距为90 mm时,由图4可知,在质心跟踪模式下,导引头受到1 W激光信号干扰后丢失目标。现变换跟踪模式为相关跟踪,并保持焦距等其他因素不变,锁定目标后发射激光干扰信号。实验结果:导引头保持稳定跟踪目标、干扰无效,如图6所示。

图6 焦距为90 mm时相关跟踪模式下导引头工作画面
原因分析:相关跟踪采用的是以图像匹配为基础的相关跟踪算法,主要通过寻找最佳匹配位置(u*,v*)来获取跟踪点,其中。跟踪过程中,图像处理系统将波门内的电视图像存储为目标模板,不断将目标模板与实时图像中各子区域进行匹配计算,并将最佳匹配位置作为目标的当前位置进行跟踪。由图6可知,激光干扰信号发出后,虽然激光的成像同样位于波门附近,但由于成像光斑较小,对匹配计算过程中误差评价函数的极值位置影响不大,难以影响对最佳匹配位置的判断,因而导引头能够继续稳定跟踪目标。
2)焦距为150 mm时,由图5可知,激光成像将位于波门之外,根据相关跟踪算法的特点,可以推断:焦距为150 mm时,保持其他因素不变,在相关跟踪模式下导引头锁定目标,在受到1 W激光信号干扰后,导引头将保持对目标的稳定跟踪。实验结论也证实了这一推断,在此不再赘述。
3.2 高功率激光干扰实验
3.2.1 质心跟踪模式下激光干扰
在焦距为133 mm的情况下,导引头采用质心跟踪模式锁定目标,而后激光信号发生器对准导引头方向发射200 W激光干扰信号。实验结果:激光信号发出到达导引头后,约0.1 s导引头丢失目标,如图7所示。

图7 质心跟踪模式下受到200 W激光信号干扰时导引头工作画面
3.2.2 相关跟踪模式下激光干扰
在焦距为133 mm的情况下,导引头采用相关跟踪模式锁定目标,而后激光信号发生器对准导引头方向发射200 W激光干扰信号。实验结果:激光信号发出到达导引头后,约1.2 s导引头目标丢失,相比质心跟踪响应时间延后了约1.1 s,如图8所示。
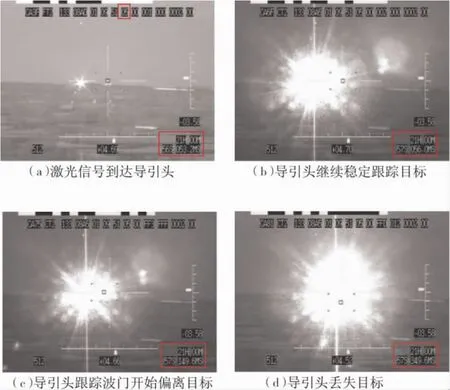
图8 相关跟踪模式下受到200 W激光信号干扰时导引头工作画面
原因分析:由图7、图8可知,焦距为133 mm时,干扰激光到达导引头在CCD探测器上的初始成像位于波门之外,但与1 W激光的干扰效果不同,200 W的激光信号对CCD探测器造成了饱和并产生了饱和串音现象。在质心跟踪模式下,当串音后的干扰图像进入跟踪波门后,便与波门内的目标图像一起参与质心运算,使质心位置偏离原来的跟踪点,因而造成导引头目标的随即丢失。而在相关跟踪模式下,当串音后的干扰图像进入跟踪波门后,并未造成导引头目标的随即丢失;而是随着干扰图像对误差评价函数在匹配计算过程中极值位置造成的偏差逐渐增大,使最佳匹配位置逐步远离目标点,从而导致导引头跟踪波门逐步偏离目标,并最终丢失,也正是因为这一过程,才使得相同条件下相关跟踪对激光干扰信号的响应时间比质心跟踪延后了约1.1 s。
当导引头在其他焦距锁定目标,受到200 W激光信号干扰后,由于激光对CCD探测器造成了光饱和串音现象,上述实验结果基本不变,在此不再赘述。
4 结论
当电视制导武器用于攻击地面静止目标时,在小功率(未能对CCD探测器造成饱和效应)激光干扰威胁下,应优先选用相关跟踪模式,若因其他原因采取质心跟踪模式时,应在保证目标图像未充满CCD靶面的前提下,尽可能使用长焦距跟踪目标,使激光成像位于波门之外甚至视场之外,从而保证导引头对目标的稳定跟踪;在较大功率(能够对CCD探测器造成饱和效应)激光干扰威胁下,同样应优先选用相关跟踪模式,一定程度上延长导引头对激光干扰信号的响应时间,并利用制导武器的飞行惯性,相对减小弹着点与打击目标之间的距离。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10 03:37:34
摄影与摄像(2021年12期)2021-10-01 14:23:33
艺术品鉴(2021年21期)2021-08-15 05:54:58
科学与信息化(2021年5期)2021-03-19 01:09:24
无线电工程(2020年11期)2020-10-28 07:12:24
计算机应用与软件(2020年8期)2020-09-02 01:33:56
锦绣·上旬刊(2020年3期)2020-06-08 09:43:52
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
弹箭与制导学报(2015年1期)2015-03-11 15:32:08