
丘陵山地农机具的自动调平系统设计
2019-01-11 17:38石兵程登慧康志亮
湖北农业科学 2019年23期
关键词:PID控制
石兵 程登慧 康志亮

摘要:设计了一种基于PID速度调节的自动调平系统,该系统以51单片机为主控制器,通过与传感检测模块的串口通信来实时获取车身姿态,以步进电机作为执行机构构成的四点式机电调平系统。通过步进电机的位移进行轴方向调平,以履带式模型车具作为搭载底盘,并应用于丘陵地区作业的农机具上。
关键词:机电调平系统;轴方向调平;PID控制;山地农机具
中图分类号:S223.2+5 文献标识码:A
文章编号:0439-8114(2019)23-0207-04
DOI:10.14088/j.cnki.issn0439-8114.2019.23.051 开放科学(资源服务)标识码(OSID):
Design of automatic leveling system for mountain farm implement
SHI Bing1,2,CHEN Deng-hui2,KANG Zhi-liang2
(1.Sichuan Deyang Huangxu Vocational Secondary School,Deyang 618000,Sichuan,China;
2.College of Mechanical and Electrical Engineering,Sichuan Agriculture University,Yaan 625014,Sichuan,China)
Abstract: An automatic leveling system based on PID speed regulation is designed. The system uses 51 MCU as the main controller. Through the serial communication with the sensing detection module, we can obtain the posture in real time. And the four point leveling system of the step motor is composed of the actuator. The platform is leveled by the displacement of the stepper motor, and the crawler-type model vehicle is used as a carrying chassis. The platform is intended to be applied to the farm machinery working in the hilly area.
Key words: electromechanical leveling system; axis leveling; PID control; mountain farm implement
山地多、平地少是中国土地构成的显著特点,但由于丘陵山地具有地表凹凸不平、田块小、不规则、坡陡弯多等特点[1-4],不利于田间作业的机械化,且农业机械在丘陵山区的行走姿态调整(即稳定性调整)仍然停留于操作人员手动控制的阶段,具有很大的随意性,这样便存在着安全隐患,使机器在丘陵山地田间工作缺乏安全性和稳定性,阻碍了丘陵山区农业的机械化发展。近年来,随着中国机械化水平在各个领域的普及,农业机具也在朝着机械化自动化的方向发展,应用于丘陵山地的拖拉机得到了快速发展,使农机具适应丘陵山地的工作环境,因此丘陵农机具的调平成为了当前农业机械化发展的必然要求[5-8]。
本研究设计一种自动调平车,并拟应用于中国广阔的丘陵山地。当调平车在不同角度的坡道上行走时,调平车车身始终保持水平,通过自动控制系统来实时调控小车的行走姿态(即使车身始终保持水平),使得其稳定性好,通过性强;其在起伏路面工作时,质心位置变动小(即可一定范圍调节质心的位置),保持调平车的平稳性,从而显著提高调平车行走时的稳定性能及坡地适应性,使小车能在丘陵山地的不同坡道上安全稳定的行走。
1 调平系统设计方案
该设计为应用于山地农具调平的底盘模型设计,调平系统调平的过程即以原动机为能量源,将各种形式的能量转为机械能做功,达到调平目的。其中,由传动系统负责能量的转化并加以控制,在现有的自动调平控制系统中,传动系统主要有机电系统和液压系统两种。机电式调平的方式最大优点在于其抗干扰性强,与液压式执行机构相比操作简单,易于维护[9-12]。在该系统中设计的模型应对的是复杂的工作环境,而液压系统有着更严格的工作环境,且在设计模型时考虑到无其他载重,所以该系统驱动装置选择了机电式调平系统。
模型采用如图1所示的四腿支撑平台的方式,平台为刚性,4个支腿的安装位置即F1、F2、F3、F4,如图2所示安装。同一轴的支腿F1、F2围绕形心上下移动,距离相同,方向相反,直至平台达到水平状态。这种方式的优点是控制方式简单,只用对各个轴相对与水平轴的角度进行控制,且速度较快;缺点是同时对两个轴调整会使平台产生形变。
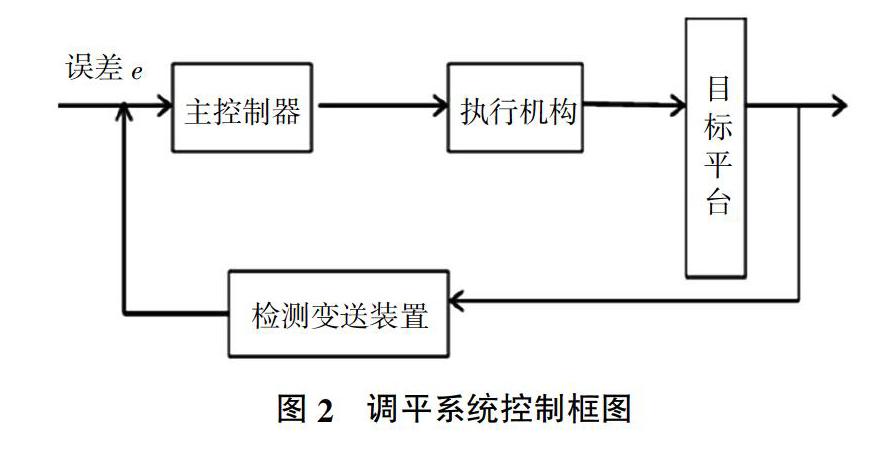
自动调平系统整体采用了负反馈的闭环控制系统,主要包括主控制器、执行机构、检测变送装置以及目标平台等部分组成,输入信号为误差,在该设计中表示平台倾斜角度,通过在主控制器中与给定精度进行比较,通过控制器中的算法程序输出信号来控制执行机构,即电机的运动,从而达到平台的调平要求。采用闭环控制可以增加自动调平系统的快速性、准确性,也比开环控制更加稳定[13-15]。如图2所示为调平系统的控制框图。
2 调平装置设计
2.1 调平装置硬件设计
该控制系统的硬件整体结构主要包括主控模块、红外遥控模块、倾角传感模块、LCD显示模块、执行机构模块。各个模块连接如图3所示。
1)倾角信息处理模块由双轴式倾角传感器、A/D转化电路、LCD倾角显示电路等组成,双轴式倾角传感器检测行走底盘X、Y双轴倾斜角度,将角度信号转化为电压模拟信号,模拟电压信号再经A/D转换后传输到单片机并同时在LCD显示器上显示当前倾斜角度。
2)控制模块是系统的核心部分,它负责了自动调平系统和手动调平系统各自的输出以及两种调平方式的切换。在接收到红外信号时进行手动调平,否则执行自动调平。控制模块最重要的功能是接收信息处理模块的数据后,对数据进行分析处理,通过设计调平算法给执行机构合适的输出,从而使平台实现自动调平。
3)执行模块,接收单片机的控制信号执行控制命令,由步进电机驱动驱动器和电机组成。
4)红外通讯模块,通过红外遥控的方式,使平台可以由操作人员通过手动方式调平,这样的设计使调平系统达到手自一体的效果,也可以在自动控制系统不运行时作为备用的调平方案。
2.2 调平装置软件设计
车身调平控制系统软件设计主要是基于双轴式倾角传感器的车身自动调平算法。手动调平采用的红外遥控算法作为辅助算法。整个系统以自动调平算法为主程序,一般情况下调平方式为自动调平,特殊情况下启动手动调平方式。因此设计标志变量Flag,用于判断调平方式。
判断的方式为外部中断查询方式,对51单片机的外部中断口P3.2进行中断查询操作,若P3.2电平被拉低,则表示有外部中断信号,即程序定义中的Flag位被复位,由默认的自动调平切换为手动调平。至此,可以看到整体的手动系统与自动调平系统由软件结合并实现了切换。
当系统进行自动调平时,控制器通过并行通信接收双轴式倾角传感器经过滤波处理的倾角信号,控制器过当前接受数据进行自动调平算法处理,做出对应调平措施,最后通过对步进电机驱动器的使能信号,方向信号,脉冲信号进行控制,继而控制相应的步进电机的动作,使车身进行调平。如图4所示。
选择增量式的PID控制算法,在图4中已经确定了调平方案为支腿绕对应轴转动的调平方式,将PID控制与自动调平方案相结合实现基于PID速度调节的自动调平方案[16]。根据PID控制原理,系统需采样输入被控量及实际的y(k)和给定值r(k),计算偏差。编程步骤如图5所示。
3 系统测试
如图6、图7,丘陵坡地自动调平车的特征是设置车身箱体(12)与调平板(2)固接,调平板(2)分别与4个三头十字轴(6)的两个对称头相连接,三头十字轴(6)可相对于调平板(2)旋转,并可在调平板(2)上的圆头键槽内滑动。设置4个三头十字轴(6)的单头分别与4个步进电机丝杆滑台的滑台(10)相连,三头十字轴(6)可相对于滑台(10)旋转。设置纵向步进电机丝杆滑台(5)与横向步进电机丝杆滑台(1)分别与底盘(4)固接。底盘(4)上安装有测量传感器(9)以检测底盘的倾斜度。设置单片机控制板(7)与底盘(4)固接并通过电路导线(3)与步进电机及测量传感器相连通。设置底盘(4)与履带轮支撑板固接。
农机具的机械化种植应在山区坡度为15°以下的平耕地(<2°,2°~6°)和缓坡耕地(6°~15°)。因此,分别设置了-15°、-8°、2°、8°、15° 5个倾斜度。在理论上该系统可以检测并实现0°±90°范围内的调平,实际上由于机械结构的限制,平台面与电机的丝杆连接处不可能垂直或平行,且电机的丝杆不可能无限延长,因此应用此调平系统所设计的模型最多可以实现X轴与Y轴两个方向±30°范围内的调平。
通过多次测量,对采样率以及精度等各个参数进行调整设置。精度的设置是为了避免不必要的频繁调平操作,调平精度设置为2°。
模型车只在横坡上行走时,横坡测试结果如表1所示。
模型车只在纵坡上行走时,横坡测试结果如表2所示。
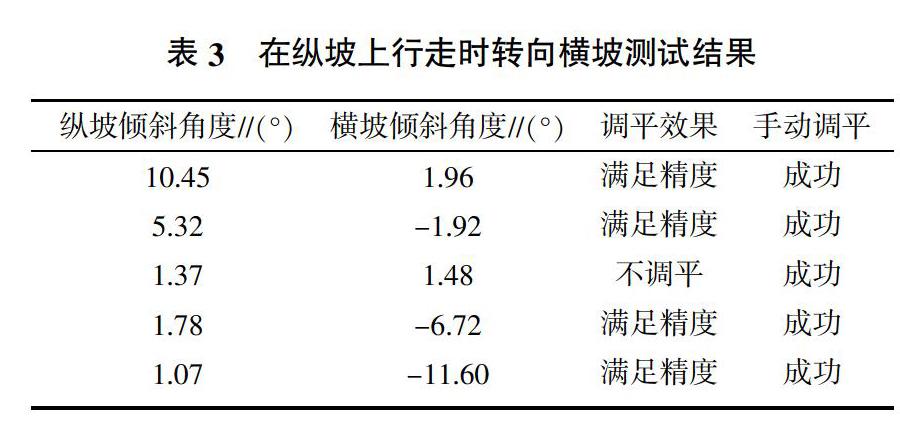
模型车在纵坡上行走时转向横坡,試验结果如表3所示。
当精度设置为2°,既可以保证系统的稳定性,又可以满足实际的倾斜度要求,一定的误差范围保证了调平系统在实际场合的运用。
该系统可较好地应用于模型车上,包括电气控制与机械设计,调平精度为-2°<α<2°;调平误差范围为<1.5%;调平时间为<2 s;净承重<2.6 kg。
4 结论
从中国农业实际状况出发,设计了一种丘陵山地农机具的调平系统,并从机械结构上对调平装置进行了设计。对搭建好的模型设置了不同的坡度,测试模型在行驶中的调平效果,包括手动调平和自动调平两个部分,得到了一套适用于调平系统的试验模型机具。该模型机具对山地农机具调平装置的设计具有重要的参考价值。
参考文献:
[1] 王 涛.山地拖拉机车身自动调平控制系统的设计与试验[D].陕西杨凌:西北农林科技大学,2014.
[2] 刘 凯.履带式山地作业机及其自动调平系统的研究[D].北京:北京林业大学,2013.
[3] 何兵怀.多点调平系统的研究[D].成都:电子科技大学,2014.
[4] 陈君梅,赵祚喜,陈嘉琪,等.水田激光平地机非线性水平控制系统[J].农业机械学报,2014,45(7):79-84.
[5] 张 洋.数字微滴流式核酸检测仪控制系统研究[D].北京:北京理工大学,2016.
[6] 向仲明.基于MODBUS协议栈的数控应用软件系统设计与实现[D].成都:电子科技大学,2014.
[7] 王小龙,谢方平,刘大为,等.果园升降平台调平装置的设计与试验[J].湖南农业大学学报(自然科学版),2014,40(5):548-551.
[8] OKASHA E M,ABDELRAOUF R E,ABDOU M A. Effect of land leveling and water applied methods on yield and irrigation water use efficiency of maize (Zea mays L.) grown under clay soil conditions[J].World applied sciences journal,2013,27(2):183-190.
[9] XIE Y M,ALLEYNE A. Two degree of freedom control synthesis with applications to agricultural systems[J].Journal of dynamic systems measurement and control,2014,136(5):1006.
[10] 耿 涛,刘军良,刘冬明.一种矿用数字式温度湿度监测系统的设计[J].煤矿机电,2013(5):42-45.
[11] 汲亚娟.粉末冶金电加热烧结炉的温度控制系统[D].石家庄:河北科技大学,2014.
[12] 陈 琳.基于温度监测的电气设备状态Bayes评估模型研究与系统研制[D].上海:上海电力学院,2013.
[13] 祁晓鹏.空气动力发动机的结构改造与性能研究[D].天津:河北工业大学,2014.
[14] 余 岭.一种虛拟嗅觉气味生成装置的研发[D].杭州:浙江理工大学,2014.
[15] 郑 娜.53A380V无触点控制与保护开关的研究[D].沈阳:沈阳工业大学,2014.
[16] SERDAR K,NURHAN K. The design approaches of two-dimensional digital filters based on metaheuristic optimization algorithms:A review of the literature[J].Artificial intelligence review,2015,44(2):265-287.
猜你喜欢
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
现代电子技术(2015年22期)2015-12-02
现代电子技术(2015年15期)2015-08-14
