共轴直升机操纵技术与微小型化发展
2019-01-11 00:43:22李科伟邓宏彬
无人系统技术 2018年4期
李科伟,赵 娜,邓宏彬,江 明
(1. 北京理工大学机电学院机电动态控制重点实验室,北京 100081;2. 淮海工业集团有限公司淮海研究院,长治 046012)
1 引 言
微小型飞行器(Micro/Mini Air Vechile,MAV)的概念产生于20世纪90年代[1]。人们发现当设计尺寸不断变小时,小型飞行器的设计方法与气动特性都迥异于常规尺寸的无人飞行器。如同诸多高新技术的发展起先都是出于一个国家军事战略的需求,微小型飞行器亦不例外。美国国防预先研究计划局(DARPA)最初考虑发展此项技术正是源于军事目的,以期美国能在未来军事行动中具备领先的技术,而之后包括海湾战争及科索沃战争在内的军事行动再次展现了无人飞行器在现代军事战争中的威力,这使得DARPA更加重视包括微小型飞行器在内的军事科技研究。
按照DARPA提出的概念,微小型飞行器应具备以下基本特征:具有自主飞行的能力、特定距离下的通讯能力以及能够带载完成特定任务。相比于常规尺寸的无人飞行器,微小型飞行器以其体积小、质量轻、隐蔽性好(低噪声、低雷达散射截面积)、功能性强、成本低、操作便捷等显著优势赢得了军民领域中广大研究人员的重视。
共轴直升机是一类上下双桨排列的旋翼型飞行器,与固定翼、扑翼飞行器不同,具有垂直起降、定点悬停及狭隘空间避障飞行等特点[2]。这种飞行能力使其无需起降跑道,能够适应如极地、高原、山区、城市建筑群、远洋孤岛及封闭腔体等复杂地形环境的搜救、救援及监视等多种民用及军用任务[3]。其自身结构紧凑,纵向尺寸小,整个飞机的重量可以相对集中在飞机重心附近,从而减小了飞行状态转换过程中的惯性矩,具有较高的可控性与机动性[4]。同时由于其双桨反转可以平衡相互产生的扭矩使其不再需要尾桨,降低了飞行器结构的复杂性,同时也避免了源于尾桨的故障隐患,能将所有功率都用于飞行器的主旋翼系统,从而提高了飞行效率。上下转子产生的气流相互干扰产生的增强作用使其悬停效率高于单旋翼的直升机。它易于实现微型飞机的设计目标,更适合于军事和民用领域。
此外,随着人们对现代战争长时间作战疲劳以及对战士伤亡的恐惧,加之有人驾驶飞机技术成熟及微电子技术、计算机技术、MEMS导航技术及控制技术的逐渐成熟及低成本发展,微小型共轴直升机渐渐成为飞行器发展的热点方向。飞行器的飞行控制与微小型化是飞行器研究的两个主要领域,因此,本文将就共轴直升机的操纵机构与微小型化发展两个方面展开讨论。
2 操纵机构的发展及现状
说起双旋翼,当从我国的古玩具“竹蜻蜓”开始。竹蜻蜓是我们祖先非常有意思的一个发明,它又称为“飞螺旋”。竹蜻蜓主要包含旋翼和中轴杆两个部分,搓动中轴杆时,旋翼可以沿着中轴杆的方向旋转,继而产生升力实现飞行。《简明大英百科全书》第九卷记载:“直升机是人类最早的飞行理念之一,多年来人们一直相信最早提出这个理念的就是达·芬奇,但现在众所周知,中国制造的直升机玩具比欧洲中世纪制造的要早。”因此,可以说人类的航天梦是被中国人发明的“竹蜻蜓”(Bamboo-Copter)玩具所点燃[5]。
在接下来的一千五百多年里,共轴直升机推陈出新。1754年,俄罗斯科学家罗蒙诺索夫(Lomonosov M V)设计了首款依靠机械动力飞行的共轴飞行器[6](图1),将微型共轴反转双桨与机械表相结合,通过机械表发条及齿轮机构驱动旋转桨旋转来实现飞行,迈出了人类飞天梦的一大步。1861年,法国科学家阿梅库尔(Ponton d'Amecourt)发明的直升机(图2),采用了微型蒸汽机驱动,提供了连续的动力驱动飞行。同年,亨利布莱特(Henry Bright)向英国专利局提出了第一个直升机专利申请,该直升机专利采用共轴双桨直升机结构(图3),传动装置采用三个锥齿轮连续传动驱动桨叶转动。亨利布莱特直升机中对齿轮连续传动的引入为桨叶转动奠定了结构基础,成为现代直升机发展的先驱。随着动力问题的解决,中国、苏联及美国相继在共轴双桨直升机方面取得了突破性的进展,1945年,从麻省理工大学留学归来的朱佳仁制造了中国第一款真正意义上的直升机——蜂鸟甲型共轴直升机[7](图4)。至此形成了现代直升机操纵机构的雏形。操纵机构是飞行器控制的重要组成,飞行器的控制量通过操纵机构转化为旋翼俯仰角的变化,产生偏航与俯仰方向的偏转力,使直升机具有良好的机动性。
到目前为止发展了两种旋翼控制方法。一种是直接式控制,即桨毂轴作为操纵轴,当改变操纵轴的方向和角度时,旋翼桨平面会跟着操纵轴的方向和角度同步倾斜。另一种是自动倾斜器,它将桨毂固定在结构旋转轴上,但自动倾斜器可以使叶片的俯仰角周期性变化,从而使气动矢量在一定范围内发生变化,也称为间接控制。直接式控制由于需要的驱动力大,适用于特别小的飞行器,所以常见的大部分飞行器通常采用自动倾斜器的变距装置。
1997—2001年,Ranjbaran F等[7]对CL-327共轴直升机操纵机构的自动倾斜器机构进行了描述及运动学与动力学分析。CL-327的倾斜盘(图4)位于上下电机之间,通过球铰与飞行器主轴相连,这使得倾斜盘既能沿平行于主轴方向滑动,也能在自身倾斜盘的平面上转动,借助设在旋转盘下方的三个线性驱动器来控制倾斜盘的三个自由度。倾斜盘与上下旋翼通过两个拉杆连接,旋翼就会根据倾斜盘的状态来进行调整。
吕俊刚等[8]论述了一种基于惯性力作用和弹性材料的操纵机构(图5),利用电机突然加速转动产生惯性力,使采用弹性材料的连杆变形,随之改变旋翼的浆距角,采用电传感器和位置控制码板检测转子的位置,以驱动电机控制和改变机体的飞行状态。
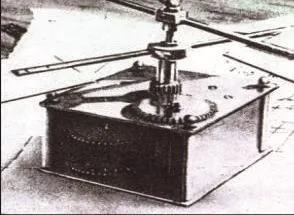
图1 罗蒙诺索夫直升机Fig.1 Lomonosov helicopter

图2 阿梅库尔直升机Fig.2 Amecourt helicopter
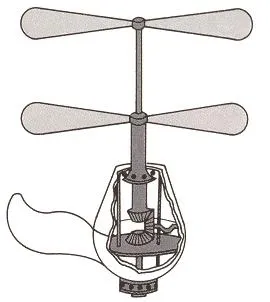
图3 亨利布莱特直升机Fig.3 Henry Bright helicopter

图 4 CL-327共轴直升机 的操纵机构Fig.4 Control mechanism of CL-327 coaxial helicopter
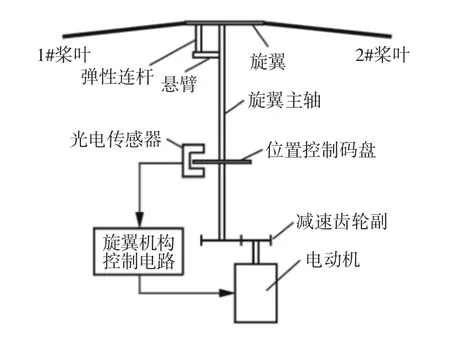
图5 基于惯性力作用和弹性材料的 操纵机构Fig.5 Manipulator based on inerti al force and elastic material
冯亚昌等[9]设计了一种半差动式控制机构,并介绍了控制原理,分析了同轴直升机控制机构的纵向通道动态特性。该飞行器采用了一种半差动航向操纵机构。通过总距套筒连接上下倾斜器的内轴来改变桨叶总距;通过航向操纵滑环连接上下桨盘的自动倾斜器外盘,来改变飞行器的航向控制。系统输入受四个舵机控制,其原理图如图6所示。
李杏健等[10]发表了名为“一种共轴式双旋翼直升机”的专利(图7),上旋翼与下旋翼之间的桨距分别通过位于上、下旋翼之间的上旋翼自动倾斜器与位于下旋翼下部的下旋翼自动倾斜器控制,桨叶与自动倾斜器通过拉杆直接相连。
袁夏明等[11]设计了一种全差动航向操纵系统(图8),四个电机围绕转轴均匀周向阵列在同一平面,其中三个电机通过长拉杆与下倾斜盘连接,实现桨距角变化;另一个舵机通过短拉杆与滑套相连实现总距变化。四个电机的转动角通过连杆传动,进而改变下旋翼变距角。通过上下倾斜盘的连杆连接,实现上下倾斜盘的同步变化。
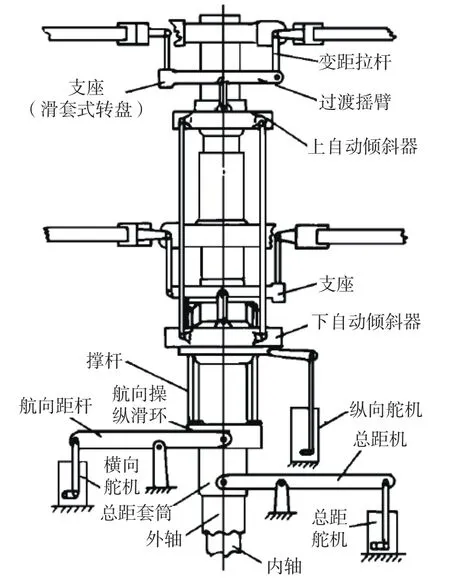
图6 半差动航向操纵机构原理图F ig.6 Half differential steering mechanism principle diagram

图7 共轴直升机操纵机构Fig.7 Coaxial helicopter control mechanism

图8 全差动航向操纵系统原理图Fig.8 Fully differential steering system principle diagram
随着共轴直升机的逐步发展,飞行器的结构不断优化,飞控机构的设计也从单一的操纵杆到复杂的多输入机构演变,同时结合相应的控制算法,使其操控的精准性大幅提升,逐步变得智能化。
3 微小型化发展及现状
目前大中型的共轴直升机主要以俄罗斯和美国产品为代表,大部分用于军事用途,如俄罗斯的卡-28、卡-50/52,美国的XH-59、X2等型号。机电一体化技术的快速发展,使得控制机构、能源和驱动装置都呈一定程度的小型化,各国都在竞相研究微小型共轴直升机。由于机体小,操控灵活,其控制稳定性是特别需要考虑的问题。近十几年来,美、日、瑞、法等国相继将阿瑟·M·扬经典的平衡锤稳定技术[12-13]应用于微型共轴飞行器姿态控制中,并取得了良好的效果;而近几年的新成果采用优异的控制算法,不再依赖于平衡锤稳定,从而降低了机体的复杂度。
2005年,马里兰大学(University of Maryland)阿尔弗雷德·格索机器人中心,推出了一款Flexible Wing MAV共轴反转双桨直升机[14],如图9所示。Flexible MAV具有上下两组分别独立的动力驱动及飞行平衡锤,通过四根由形状记忆合金制成的柔性骨架主动控制上下两组动力浆及平衡锤,实现姿态控制。此外,Flexible MAV通过机体底部电子部件及动力电池自身重量的较低质心位置确保飞行器稳定。
2006年,千叶大学(Chiba University)、宇都宫大学(Utsunomiya University)及爱普生公司 (Epson)联合开发用于地震搜救的FR微小型自主无人直升机[15],如图10所示。其桨叶直径136mm,高约85mm,含电池质量仅为12.3g,飞行时间为3min。FR通过超薄型超声波马达驱动双螺旋桨飞行,并且通过电机控制重心偏移块的方式,使重心偏移达到航向控制的目的。
2008年,瑞士苏黎世联邦理工学院(Swiss Federal Institute of Technology)开始研制MuFly微小型飞行器[3],其目标是开发一款完全自主的,在质量和尺寸上与小鸟相当的微小型无人机,如图11所示。MuFly高200mm,螺旋桨直径150mm,质量80.31g,能够进行室内自主飞行及自主避障。
2010年,法国南希自动化控制研究中心(Research Center for Automatic Control of Nancy)和圣路易法德研究院(French-German Research Institute of Saint-Louis)联合进行适用于80mm单兵迫击炮发射的GLMAV微小型无人直升机研究[16],以用于城市反恐及城市作战的战场信息实时监控,如图12所示。GLMAV螺旋桨直径250mm,机体直径80mm,总质量1.1kg,能够实现室外全自主飞行。
同年,美国陆军研究中心气动飞行局(Aero flight dynamics Directorate (AMRDEC) U.S. Army Research)与小型飞行器公司(Lite Machines Corporation)联合进行Tiger Moth[17]微小型无人机的控制系统开发及飞行测试,如图13所示。室外飞行试验表明,Tiger Moth微小型无人机能够在3级微风环境中实现姿态稳定飞行。
2015年,美国Ascent Aero Systems公司开发出一款只有保温瓶大小的航拍机Sprite (如图14所示)。Sprite采用共轴双桨设计,使用时旋翼打开,不使用时旋翼可折叠,外观很像是竹蜻蜓,而且可以轻松放入背包。Sprite是一个便携的航拍器,它在操控的灵活性方面相比于其他共轴直升机有很大的突破,例如,它可以设定巡航路线,并自动开启巡航模式,如有需要可立即在某地点进行停留。
在2016年欧洲防务展上,Rafael公司发布了FIREFLY(萤火虫)巡航弹(如图15所示),适用于500m城市地形和1km开阔地形的典型射程,为处于最低战术梯队的步兵提供安全和有目的漫游侦察,用于获取实时作战环境中的视距内和超视距战术情报。该系统由机身、可见光/红外传感器和具有双向数据链路的集成制导系统组成,质量不足3kg,装在一个密封的轻质容器中。该系统既可以装在一个小背包里,也可以分发给连/排级别的单个士兵。萤火虫可以在空中游荡30min左右,也可以在不同的位置降落,续航时间可以延长到几个小时。
2018年,美国NASA发表了火星用直升机探测器[18],翼展达到1.21m,质量约1.7kg(如图16所示)。采用共轴双桨设计,对火星进行空中探测,可以提供超越轨道卫星、着陆器和漫游者的任务能力。它能以受控的方式进入到指定目标地点并降落,还能用来携带或回收小型有效载荷。飞行器可以快速侦察出安全的穿越路线或对可能的科学目标目的地进行侦察,也能探测漫游者无法到达的区域,能及时的将小的科学样本带回火星飞船,返回地球。

图9 Flexible MAV 无人直升机Fig.9 Flexible MAV unmanned helicopter

图10 FR微小型直升机Fig.10 FR mini helicopter

图11 MuFly 无人直升机Fig.11 MuFly unmanned helicopter

图12 GLMAV 无人直升机Fig.12 GLMAV unmanned helicopter

图13 Tiger Moth无人直升机Fig.13 Tiger Moth unmanned helicopter

图14 Sprite航拍机Fig.14 Sprite unmanned helicopter

图15 Rafael公司FIREFLY巡航弹Fig.15 Rafael FIREFLY cruise missile
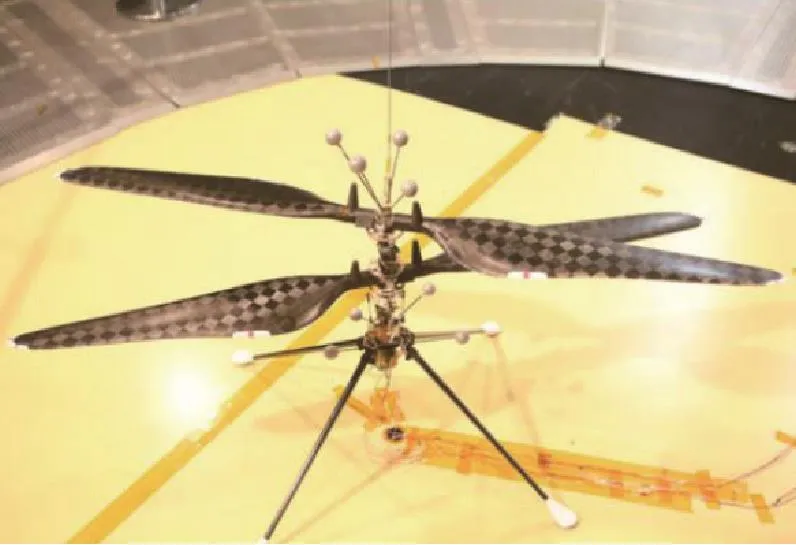
图16 火星探测飞行器Fig.16 Mars exploration vehicle
4 微小型共轴直升机关键技术分析
4.1 最优化总体设计
微小型共轴直升机的总体设计应考虑质量轻、体积小、机动性高、效能比高几项原则。如果几项原则之间存在制约与矛盾时,应考虑飞行器在同一质量下时,其尺寸与机动性、效能比成反比关系[19]。因此,在设计微小型共轴飞行器时,应首先考虑符合拉升强度且足够轻量化的材料;然后再综合考量体积、机动性和效能比等因素在具体项目中的重要性,划分出一定优先级以达到总体设计的综合最优。根据技术指标的要求,分解各个子系统的功能和性能,确定各个子系统的布局,对设计好的共轴直升机进行三维立体建模,并对各个结构的运动进行仿真,确保所设计结构的可行性。
4.2 动力与能源
微小型共轴直升机的动力装置一般包含微型直流电机、电机驱动模块、旋翼等,能量由机载电池提供。目前各种微小型飞行器都使用电机和电池的组合搭配,电机中线圈和硅钢片的质量占比大,同时由于电池技术的制约,电池的续航和质量都亟待提高,致使能源和驱动装置在整个飞行器的质量中占较大比重,并同时消耗了大部分能量。因此,高效的驱动技术,以及高密度能量的电池技术或能研发出一种新能源是推动飞行器微小型化普及的关键。其次,一般应将发动机紧靠旋翼轴和主减速器,以使得传动系统质量最轻。由于动力装置需要经常进行检查,要认真考虑动力装置的使用维护性和可靠性。
4.3 低雷诺数环境空气动力学特性
共轴直升机的微小型化不仅是常规飞行器的简单缩小,其尺寸的微小型化也带来许多亟待解决的难题,低雷诺数下的空气动力学分析即为其中最为重要的问题之一。由于主尺度较小,飞行速度较低,其相应的雷诺数范围大约在102~105之间。低雷诺数下空气黏性效应显著,气动力出现一些与高雷诺数下显著不同特性,所以普通直升机的空气动力学原理不能直接应用于微小型的共轴直升机。一般需要建立三维流场物理模型,采用适合的数值分析方法计算,对低雷诺数下的飞行过程中的各个状态流场进行数值模拟,获得流场分析数据,从而分析低雷诺数环境下共轴直升机的空气动力学特性。然后根据其特定的动力学特性,优化升力部分的设计,提高飞行器的飞行效率。
4.4 动力学模型的建立
微小型共轴直升机的运动方程应是多体动力学方程,至少应该包括机身运动方程和旋翼挥舞运动方程。直升机飞行动力学把共轴直升机机身视为理想刚体,这样共轴直升机在空中的运动有6个自由度,即质心的3个移动自由度和绕质心的3个转动自由度。相应的,共轴直升机的运动方程由质心的移动动力学方程和绕质心转动的动力学方程组成。旋翼是共轴直升机的升力面,又是飞行器的操纵面,提供使飞行器升降、俯仰和滚转的操纵力和力矩,完成飞行器向任何方向飞行。旋翼的挥舞化解了飞行器在飞行过程中气流不对称对升力造成的影响。旋翼的挥舞对共轴直升机的稳定性、操纵性和配平起着关键作用,是直升机操稳分析的主要特点和难点,也是区别于固定翼飞机操稳分析的主要根源。
实际建模过程中很难建立准确可靠的动力学模型是因为飞行器飞行时会受到空气动力、重力、旋翼转动产生的陀螺效应和惯性力矩以及外部环境的气流干扰[20]。此外,所使用的旋翼在尺寸和强度方面的数据,也将直接影响模型的准确性。目前,大多采用分体建模法(牛顿力学[21-23])及一体化建模(Lagrange 方程[24]与Hamilton原理法)。其次,对于模型方程的线性化求解也是影响结果准确度的重点之一。
4.5 飞行控制
飞控系统的设计不仅与所建模型高度相关,也受传感器反馈精度的影响。微小型共轴直升机不仅有多个变量,非线性强、运动耦合性强、对干扰极其敏感,而且多数都是欠驱动系统,这使得共轴直升机的飞控系统较为复杂。
姿态控制是共轴直升机飞行控制的重点,共轴直升机的运动存在很强的耦合性:在xy平面的运动,必定耦合z方向的运动。解决了姿态控制的难题就能实现位置控制,姿态控制器的设计和验证一直是国际上研究的重点,如解耦控制算法[22],基于步进技术的非线性控制算法[23]等。不过就具有类似控制特性的微小型四旋翼飞行器比证,虽然设计非线性控制律在仿真计算时得到的效果很好,但由于采用的模型准确度问题,实验中表现出的数据反而没有PID控制来得有效[25-26]。因此,设计出能完成精确的姿态控制,又具备环境自适应能力的控制器是一项紧迫的任务。
此外,微小型共轴直升机主要用于近地环境,近地环境复杂且遮挡物较多,有建筑群、山地、森林、隧道等。GPS时常丢星,不能准确锁定位置,在任务实施过程中,需要综合惯性导航系统、可视系统、雷达等技术。在此场景下,对通信链技术的传输距离和可靠性也提出了较高的要求。
5 结束语
微小型共轴直升机在军事和民用领域都有十分广阔的应用前景,具有长远的研究价值。同时共轴直升机的微小型化也需要多学科交叉,比如电子、材料、通信、流体力学等,在发展的同时也能推动多学科研究的深入。我国的微小型共轴直升机尚处于预研或者原理样机阶段,展开此类飞行器的研究意义重大,为实现我国小型无人飞行器跨越式发展提供理论基础和技术储备。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
北京航空航天大学学报(2018年1期)2018-04-20 06:38:10
电子制作(2018年2期)2018-04-18 07:13:25
北京航空航天大学学报(2017年7期)2017-11-24 05:27:08
北京航空航天大学学报(2017年10期)2017-04-20 08:51:25
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12