微型扑旋翼飞行器悬停的空气动力学研究
2019-01-11 00:43:20吴江浩
无人系统技术 2018年4期
周 超,吴江浩
(北京航空航天大学交通科学与工程学院,北京 100191)
1 引 言
上世纪九十年代美国国防预先研究计划局(DAPRA)首次提出了微型飞行器(Micro Air Vehicle,MAV)[1]的概念。MAV体积小,重量轻,具有良好的隐蔽性和机动性,适于在较小的空间范围内飞行,并可在某些恶劣环境条件下完成侦察、通讯、勘探、协助救援等任务,因此在军用及民用领域有诸多广泛应用。发展微型飞行器对未来国家安全和国民经济建设等方面将起到非常重要的作用,其概念一经提出便得到了世界上许多国家的极大关注,并成为国际上的研究热点。
过去的二十年间MAV得到了飞速的发展,诸多MAV飞行器原理样机相继问世。国内外各大科研机构通过对微型飞行器本体及其子系统研究,提出了多种气动布局概念。根据机翼布局形式及运动特点的差别,大部分MAV可以归为三种类型[2]:固定翼MAV、旋翼MAV以及扑翼MAV。三种典型MAV布局形式特点鲜明,其中固定翼MAV尽管航速高、航程远,但不能悬停,且在低雷诺数飞行条件下,其升力的产生和飞行器控制方面的缺点显著;旋翼MAV和扑翼MAV被证明具有良好的气动效率[3],但旋翼低雷诺数下气动性能恶化显著,扑翼运动机理复杂、机构实现困难。当前,借鉴不同MAV气动布局的飞行原理,通过设计复合式气动布局充分发挥不同布局的气动优势也成为MAV设计的方法之一。基于此思路,近年来提出了微型扑旋翼气动布局。
本文对过去十年国内外微型扑旋翼悬停飞行的空气动力学方向的研究进行综述,着重介绍扑旋翼的概念及其发展,扑旋翼空气动力学研究的相关成果,并对未来发展扑旋翼MAV所需要着重解决的问题进行展望。
2 微型扑旋翼的概念及发展
2.1 微型扑旋翼概念
自然条件下蜻蜓前飞时,如图1(a),其一对竖直扑翅除产生竖直方向的升力平衡身体重力外,还产生沿前进方向的推力以克服前飞阻力,如图1(b)。受此启发,如果我们将蜻蜓一对翅由平面对称分布变为轴对称布置,如图1(c),此时蜻蜓的一对翅仍能产生竖直方向的升力,但两个翅所产生的推力不再是同向而变为反向,从而形成绕身体纵向轴的旋转力矩,该情况下蜻蜓及其一对翅在此旋转力矩的作用下将实现绕身体纵轴旋转,上述推断意味着可以通过对系统输入拍动运动而收获旋转运动。上述仿生原理启示我们,可以利用拍动产生的推力驱动翼旋转,实现主动拍动、被动旋转的翼形式,该布局既保留了低雷诺数下扑翼较优的气动特性,又可以利用旋翼气动效率较高的气动优势。
基于上述思路,英国克兰菲尔德大学郭士均等[4]结合扑翼MAV和旋翼MAV的特点,提出了扑旋翼MAV的概念。扑旋翼的运动原理和空气动力学原理是:一对翼中心对称安装在一根竖直振荡轴上,翼不仅可上下拍动,又可绕振荡轴水平旋转。工作时,电机带动振荡轴往复振荡,驱动双翼上下扑动,此时在对称双翼上产生水平对称推力和部分竖直升力;作用在双翼上的推力形成旋转力矩,驱使双翼绕中心轴同向旋转,翼初始安装时设置一定的攻角,旋转的同时翼还可进一步产生升力。扑旋翼融合了扑翼和旋翼的特点,在该布局上昆虫翅拍动产生高升力以及翼旋转产生升力的原理均得到应用,但与旋翼不同的是,扑旋翼的旋转运动是由翼拍动过程中产生的气动推力矩驱动的,该力矩相对模型是外力矩,这大大降低了扑旋翼反扭矩配平要求。同扑翼与旋翼MAV一样,扑旋翼MAV也具有垂直起降和空中悬停飞行能力,同样可在小空间内使用。

图1 扑旋翼概念来源及其原理样机Fig.1 Flapping rotary wing concept and a flapping rotary wing protocol
2.2 扑旋翼飞行器发展过程
利用扑旋翼的概念,国内外相关研究机构设计和制作了多种形式的扑旋翼MAV模型[4-7],图2给出了扑旋翼MAV的发展过程。
自从Vandenberghe等[8]发现通过翼拍动可以产生推力驱动翼旋转后,美国Maryland大学Brandon Fitchett等[7]便加工制作了一金属机械模型“Flotor”。该机械模型上装配两个电机,两个电机分别驱动翼的拍动运动和旋转运动。当该机械模型仅驱动拍动的电机工作时,翼便主动拍动、被动旋转。在扑旋翼的概念提出之前,人们普遍关注扑翼拍动产生推力这一物理现象,并不关注该概念飞行器的气动特性及应用前景。郭士均等[4]提出扑旋翼概念后,利用压电材料制作了原理验证机[5],该模型较小的拍动幅度与旋转速度使得该压电模型平均升力极低,但尽管如此该原理验证机升力测试实验证实了扑旋翼布局用于MAV设计的可行性。
压电式扑旋翼模型运动需要较高的驱动电压,这对外部能量供应提出了较高的要求,据此研制可飞的模型显然不现实,因此国内外众多研究机构又相继开展了机械式扑旋翼模型的研究。北京航空航天大学吴江浩等[6,9]研制了曲柄滑块驱动的机械式扑旋翼模型,北京理工大学王正杰[10]、贺媛媛等、西北工业大学李占科等[11]也分别进行了扑旋翼机构设计的研究。2014年,Cranfield大学、北京航空航天大学以及北京理工大学的扑旋翼研究团队合作制作了一个3.5g左右的机械式扑旋翼(图3),并实现了该类布局飞行器的首次垂直起降飞行[12]。2015年,北京航空航天大学李道春等[13]又设计制作了首个可带动力飞行的扑旋翼模型。
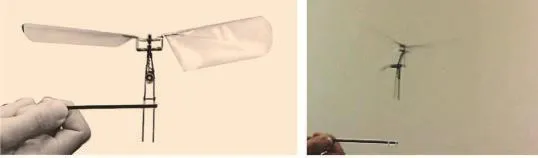
图3 可垂直起降飞行的微型扑旋翼模型Fig.3 The micro flapping rotary wing model achieving vertically take-off flight
3 微型扑旋翼飞行器悬停的空气动力学
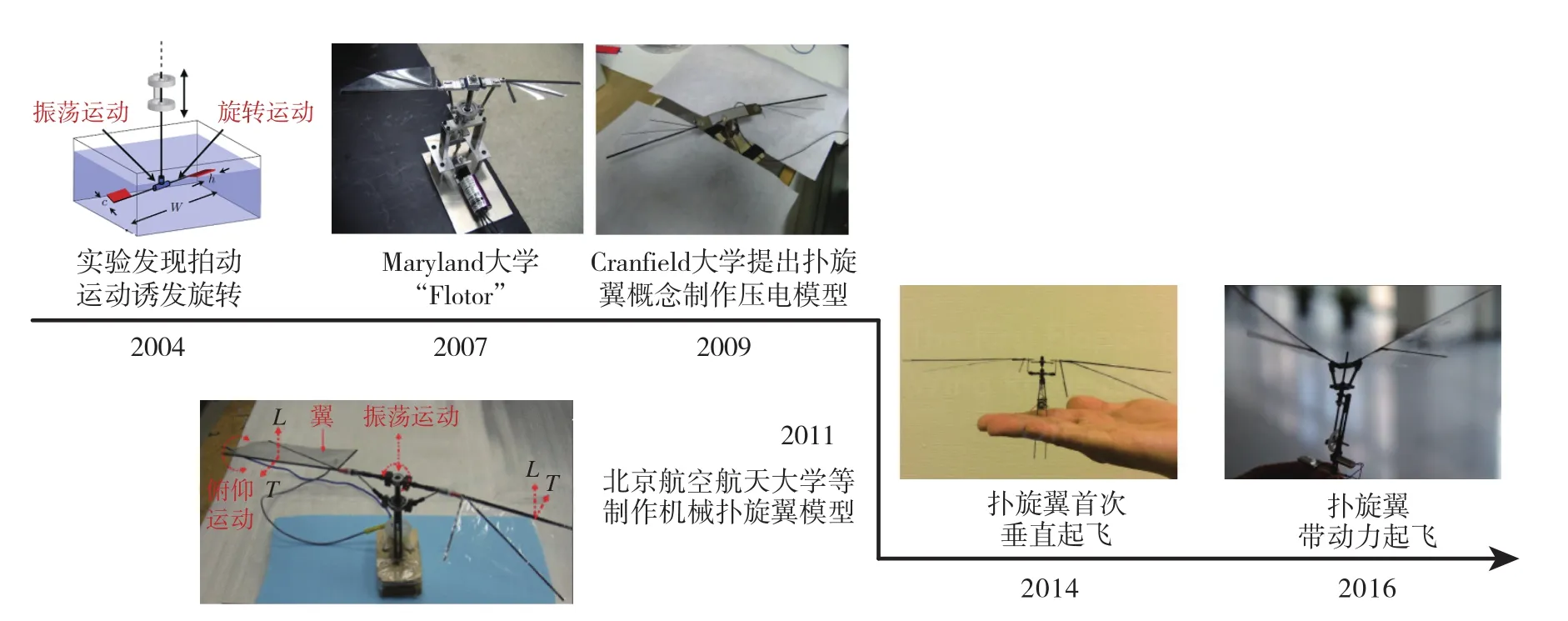
图2 扑旋翼MAV发展历程Fig.2 The development history of flapping rotary wing MAV
自扑旋翼的概念提出后,扑旋翼布局用于MAV设计的可行性很快通过实验得到证实[4-6]。之后的研究着重解决扑旋翼悬停飞行的空气动力学原理以完善飞行器研制的气动理论。这一方向的研究主要集中在获取扑旋翼的运动规律,探究扑旋翼基本气动特性[6,9,14-18],揭示扑旋翼流动机理[16-17]、探究扑旋翼相对其他气动布局的气动优势[12,17-18]以及增升控制[19]等。上述研究工作对理解扑旋翼的气动特性,弄清其中的物理机制起到了重要的作用,有力的推动了扑旋翼MAV的发展。
3.1 扑旋翼运动规律
扑旋翼运动规律是研究扑旋翼气动特性的基础,因此研究者首先测量了扑旋翼的运动及变形规律。
在早期的研究中,扑旋翼的振荡频率及旋转速度通过对激光位移传感器[9](图4)获得。激光位移传感器测量难以得到扑旋翼的拍动及俯仰运动规律,因此,能够获得各瞬时扑旋翼运动变形图像的高速摄像方法在之后的运动规律测量中得到了应用。通过单台相机拍摄扑旋翼运动图像,结合图像中扑旋翼的投影关系,郭士均等[12]获得了多个周期内扑旋翼的拍动运动规律及攻角变化规律(图5)。单台相机无可避免的存在相机畸变,同时由于扑旋翼是旋转的,在某些特殊情况下(如翼尖连线平行于相机轴时)扑旋翼的拍动运动和俯仰运动测量便存在较大的误差。为避免上述问题,吴江浩等[20-21]发展了基于多台高速摄像机的扑旋翼运动测量装置(图4),利用三台高速摄像机对预先涂有标记点的扑旋翼进行同步拍摄,通过图像处理、标记点识别和三维空间重构,准确获取各个标记点的三维位置坐标,据此他们准确获得了扑旋翼的三维角运动及变形运动规律。这一规律的提取,为分析扑旋翼的运动特点,进而为探究扑旋翼的气动机理提供了运动输入和依据。
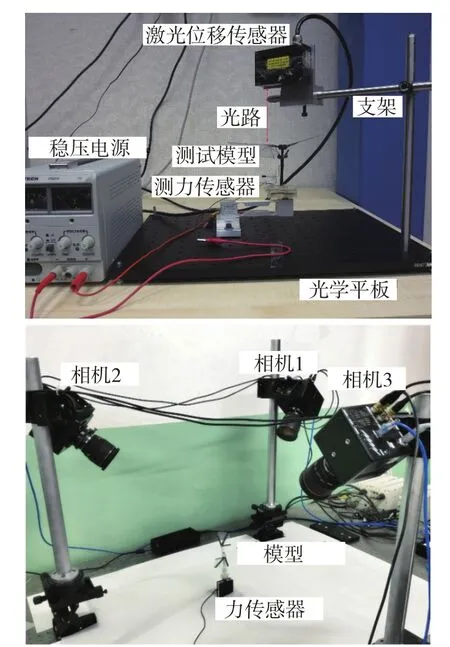
图4 扑旋翼运动测量装置Fig.4 Setups used for kinematic measurement of flapping rotary wing
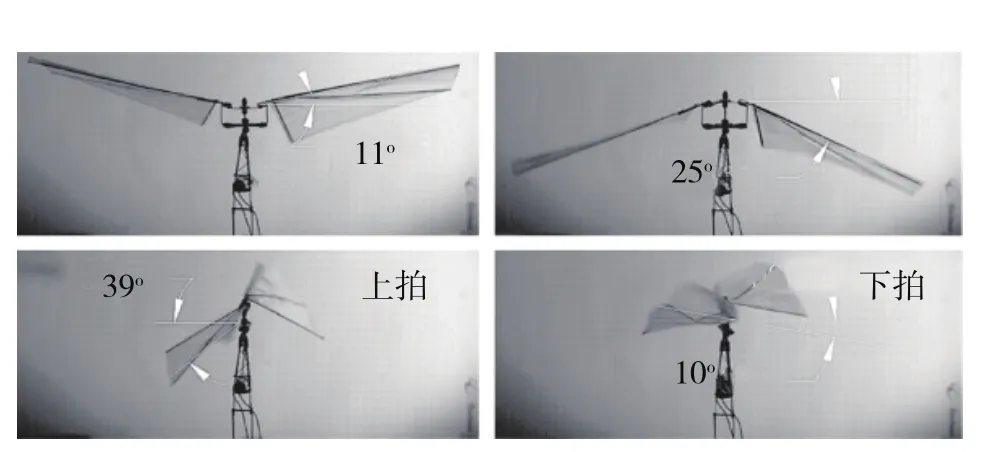
图5 基于单相机拍摄图像的扑旋翼运动规律测量Fig.5 Flapping rotary wing kinematic measurement based on images from single high-speed camera
邱健等[21]测量特定的扑旋翼模型运动规律发现,旋转角随时间呈线性增加,拍动角随时间的变化规律近似于三角波,且在下拍/上拍中存在高频波动。在一个拍动周期内,俯仰角随时间在初始攻角附近发生剧烈变化,出现多个峰值。改变拍动频率对于拍动角的影响较小,但会使拍动幅度增加的趋势明显。拍动频率不变,增加初始攻角会带来拍动幅度和转速的减小,但俯仰运动受初始攻角的变化影响较小。总体而言,初始攻角对翼运动的影响小于拍动频率。他们将拍动频率和转速无量纲化,发现旋转雷诺数Re与拍动雷诺数Ref呈线性关系(如图6所示),而与初始攻角无关。
3.2 扑旋翼基本气动特性
扑旋翼悬停状态下基本气动特性研究主要是明确扑旋翼设计参数对其气动力的影响规律。扑旋翼的设计参数主要有运动参数和几何参数,前者包括拍动频率、初始攻角及旋转速度,后者主要包括翼的展弦比、根梢比及面积二阶矩位置等。

图6 扑旋翼运动规律Fig.6 Kinematics of flapping rotary wing
基于机械扑旋翼模型,周超等[6,9]实验测量了扑旋翼升力、被动旋转速度与扑翼拍动频率及初始安装攻角之间的关系(见图7)。研究表明,特定初始攻角下,初始阶段增加拍动频率可提高扑旋翼转速,但一旦拍动频率超过特定值,扑旋翼转速反而保持不变,增加拍动频率会使翼平均升力随之线性增加。扑旋翼最大平均升力值在15o~20o的初始攻角条件下取得,当初始攻角大于失速攻角时,扑旋翼升力可以在较大的攻角范围维持较高值而不显著降低,这表明扑旋翼具有良好的失速特性。
吴江浩等[16,21]采用CFD方法又进一步系统研究了Re、运动参数及几何参数对扑旋翼气动特性的影响。研究发现,增加拍动幅度和旋转速度的比值虽然会增加扑旋翼平均旋转力矩系数,但也使翼平均升力系数降低,增加初始攻角的影响与增加拍动幅度和旋转速度比值的影响相反,增加俯仰幅度或Re能够同时增加翼平均升力系数和旋转力矩系数。改变翼的几何参数(如二阶矩半径、扭转角及展弦比)会改变翼气动力,采用中等大小面积二阶矩、稍带扭转的中等展弦比扑旋翼可获得较高升力。
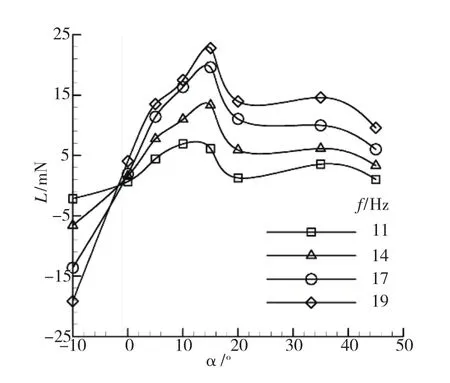
图7 扑旋翼升力随拍动频率及攻角变化Fig.7 Lift of a flapping rotary wing varied with flapping frequency and wing angle of attack
实验研究与数值仿真研究均表明扑旋翼的俯仰运动可以显著影响扑旋翼的升力。考虑到实验研究中机械模型可实现的俯仰幅度较小,而数值仿真模型又未考虑翼旋转速度稳定的状态,因此李豪[14]、周超等[18]均采用数值仿真的方法从更宽的俯仰运动参数空间来探究扑旋翼转速平衡状态下的气动特性,分别如图8及图9所示。研究发现平衡转速随初始攻角增加大致线性减小,但随俯仰幅度的减小,平衡转速随初始攻角的梯度显著增加,且平衡转速对初始攻角的敏感程度不同,俯仰幅度越小,平衡转速对初始攻角的变化越敏感,因此如果希望获得较快的旋转速度,应该尽量使用较小的俯仰幅度。不同俯仰幅度下,升力系数随平均攻角的变化近似呈现抛物线型,且升力峰值在15o~20o取得。结合先前机械模型测力实验结果[13],因此若扑旋翼要获得高升力,扑旋翼初始攻角应取15o~20o。俯仰幅度的减小在带来平衡转速增加的同时,也使得扑旋翼的升力大幅提高。但需要注意的是,由于在较小的俯仰运动幅度下攻角变化会导致翼升力发生显著波动,这会使微型飞行器的攻角选择和结构设计面临极大的困难,因此也需在设计时着重予以关注。

图8 扑旋翼升力、功耗及效率随攻角变化规律Fig.8 Lift,power consumption and efficiency of a flapping rotary wing varied with wing angle of attack
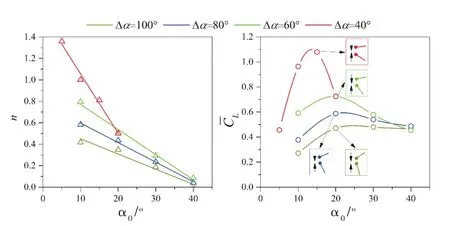
图9 不同俯仰运动条件下的平衡转速和平均升力Fig.9 Rotating Speed and mean lift at torque-balanced status varied with pitching kinematics
在明确了扑旋翼基本气动特性的基础上,研究通过对扑旋翼周围流场结构演变的细致分析进一步揭示扑旋翼气动力产生原理。吴江浩、王逗等[16]采用数值仿真方法计算了扑旋翼周围流场演变,研究表明随着扑旋翼的上下拍,其周围涡有规律的生成和脱落,下拍生成紧致的前缘涡是导致扑旋翼产生高升力的主要因素。为了进一步探究扑旋翼中旋转运动与拍动运动的耦合影响,吴江浩、周超等[17]又进一步计算并对比了扑旋翼与单纯竖直扑翼的气动力及周围的流场结构,研究发现相比竖直扑翼,扑旋翼上拍有效攻角为正值,上拍时前缘涡在上翼面形成,因而扑旋翼上拍过程反而产生了正升力,而这是导致扑旋翼相比竖直扑翼升力增加的主要原因。鉴于扑旋翼运动是旋转、拍动及俯仰运动的耦合,为了明确各种运动影响,吴江浩、陈隆等[22-23]又进一步研究了旋转-拍动-俯仰耦合运动下翼的气动特性,研究发现在旋转的基础上耦合拍动运动可以显著减小翼的阻力,且阻力减小的程度与St数密切相关。在旋转-拍动运动的基础上增加俯仰运动会进一步减小翼的阻力矩,当翼的平均攻角大于0o时,翼的升力也可以进一步的增加。造成这一现象的主要原因在于俯仰运动引起前缘涡强度的增加且使得气动力向升力方向更多投影(图10)。
3.3 与其它可悬停飞行器气动特性对比
当前可用于微型飞行器设计的气动布局形式众多,在飞行器初始设计阶段如何进行布局形式选择尚缺乏统一的指导。扑旋翼作为一种新型微型飞行器设计布局形式,其相对其他气动布局的气动优势也尚不清楚,这也使得我们在发展扑旋翼飞行器时并不清楚如何发挥其气动优势。因此,过去还着重对比了扑旋翼气动特性与其他可悬停气动布局性能。
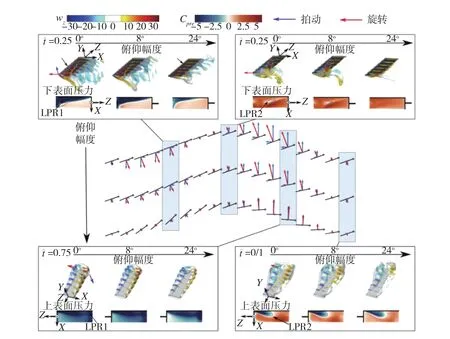
图10 旋转-拍动-俯仰耦合运动的翼气动力及流场变化Fig.10 Wing aerodynamic forces and flow structures of pitching-flapping-perturbed revolving wing
扑旋翼提出不久,其升力产生能力是研究者关注的主要问题之一。扑旋翼中拍动与旋转的耦合运动是否能够为扑旋翼带来升力产生上的优势并不明确。为此,基于实验测量结果(图11),周超等[9]对比了扑旋翼和同转速旋翼之间的升力发现,当斯托罗哈尔数超过一定值,也就是拍动产生的非定常效应较强时,扑旋翼便能够产生高于旋翼的气动升力。明确了扑旋翼的该特征后,后续研究关注的问题便是扑旋翼是否相对其他悬停气动布局,如扑翼和旋翼,在升力、气动效率方面存在优势。
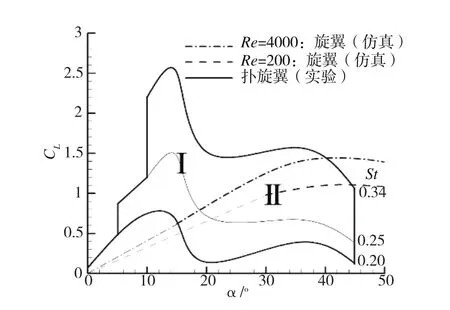
图11 扑旋翼与同转速旋翼升力系数对比Fig.11 Lift coefficient comparison between flapping rotary wing and rotary wing with same rotating speed
对比各MAV气动布局气动性能通常采用两种对比基准及对应的性能评价指标。一是取各气动布局的翼尖Re作为对比基准,在此基础上比较各种气动布局的平均升力系数、平均功率系数以及功率因子等。保持Re相同是多数文献[3,24-26]比较多种气动布局气动性能时通常采用的基准条件。功率因子衡量的是翼产生相同平均升力系数时所付出的消耗。功率因子值越大,表示翼在产生相同平均升力系数时效率越高。二是取各气动布局产生特定的升力作为对比基准,在此基础上比较各种气动布局的功率消耗。
在相同Re的基准条件下,李豪等[14]采用准定常方法,周超等[17-18]采用CFD计算方法同时对比了四种布局(旋翼、水平扑翼、竖直扑翼以及扑旋翼)不同攻角条件下的气动力及升力效率(图12、图13),发现扑旋翼相比旋翼、水平扑翼、竖直扑翼存在两方面的气动优势:一是在相同的Re条件下,它能产生比旋翼、水平扑翼、竖直扑翼更高的升力,因而在设计大载荷MAV时扑旋翼可以成为一种更优的气动布局形式;二是扑旋翼高升力的产生状态也是其气动效率较高的状态,这意味着扑旋翼能够以较高的气动效率产生高升力。
之后,周超等[18]又在升力固定的前提下系统的对比了扑旋翼、扑翼和旋翼的能耗情况。在相同目标升力条件下,他们分析了两种攻角状态,即升力系数最大的攻角状态及气动效率最高的攻角状态。对比发现,旋翼采用效率最高的攻角状态产生升力时其气动功耗最少,扑旋翼次之,最后是水平扑翼。

图12 四种布局功率因子随升力变化Fig.12 Power factor changing with lift of four MAV wing layouts in hovering flight
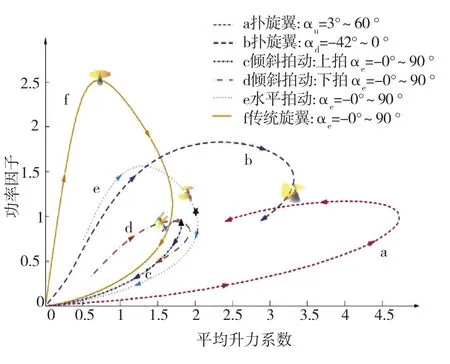
图13 扑旋翼、昆虫扑翼及旋翼气动效率及升力变化Fig.13 Power efficiency versus lift of flapping rotary wing, insect-like flapping wing and rotary wing
3.4 扑旋翼增升控制技术

图14 开孔翼设计方案Fig.14 Intact wing and perforated wing
由于微型飞行器尺寸小、重量轻,扑旋翼MAV使用的动力装置及其输出功率也极大受限,因此减重增升设计始终是扑旋翼设计的重点工作。扑旋翼下拍产生较大的正升力,但是上拍也产生明显负升力,如果能减小上拍负升力而保持下拍正升力不变,那便可显著增加扑旋翼升力。诸多扑旋翼增升控制方案都基于这一思路开展,但解决方案稍有区别。陈隆等[19]基于这一想法设计了开孔扑旋翼(图14),该翼上开孔并覆盖膜,上拍时孔打开卸载,下拍时孔关闭,升力维持。他们采用实验方法研究了开孔扑旋翼的基本气动特性,研究发现(图15),初始攻角存在一个临界值,当初始攻角小于该临界值时,开孔翼可以增加升力,升力最大增幅约35%,但当初始攻角大于该临界值时开孔翼平均升力反而比传统非开孔翼要小。之后通过优化开孔位置、开孔大小,研究进一步获得了使升力最大化的开孔设计方案。贺媛媛等[27]提出了弓形机翼的方案,初始状态下机翼在绳的牵引下呈弓形,在下拍过程中受绳的拉拽,机翼承受气动载荷,产生较大升力,而在上拍过程中,机翼后缘在气动载荷的作用下向下变形,实现卸载,减小上拍的气动载荷,以此实现整个周期内的气动升力增加。据悉,相关研究仍在进行中。
4 研究展望
过去的研究针对悬停状态扑旋翼等的气动特性展开,有利支持了可悬停的微型扑旋翼飞行器的研制。展望未来的研究,为实现真正工程可应用的微型扑旋翼飞行器,仍需要在扑旋翼前飞的空气动力学、扑旋翼飞行器动稳定性及飞行控制方面开展深入的研究工作。
4.1 扑旋翼前飞的空气动力学研究
扑旋翼前飞是扑旋翼重要的飞行状态之一,也是其完成任务必须经历的飞行状态。扑旋翼本身是拍动-俯仰-旋转运动的耦合,其悬停状态下的空气动力学问题本身就相当复杂,而在前飞时,受前飞来流条件的影响,其上行和下行气流的影响会使得气动力进一步产生不对称特性,这使得扑旋翼前飞空气动力学问题相比悬停时更为复杂。因此,探究扑旋翼前飞空气动力学问题,应在过去研究旋翼和扑翼前飞气动特性的基础上,着重关注前飞状态扑旋翼的气动力及气动力矩变化规律并揭示其气动力产生原理,并基于此提取用于前飞飞行控制参数和飞行控制策略。
4.2 扑旋翼飞行器动稳定性及飞行控制问题研究
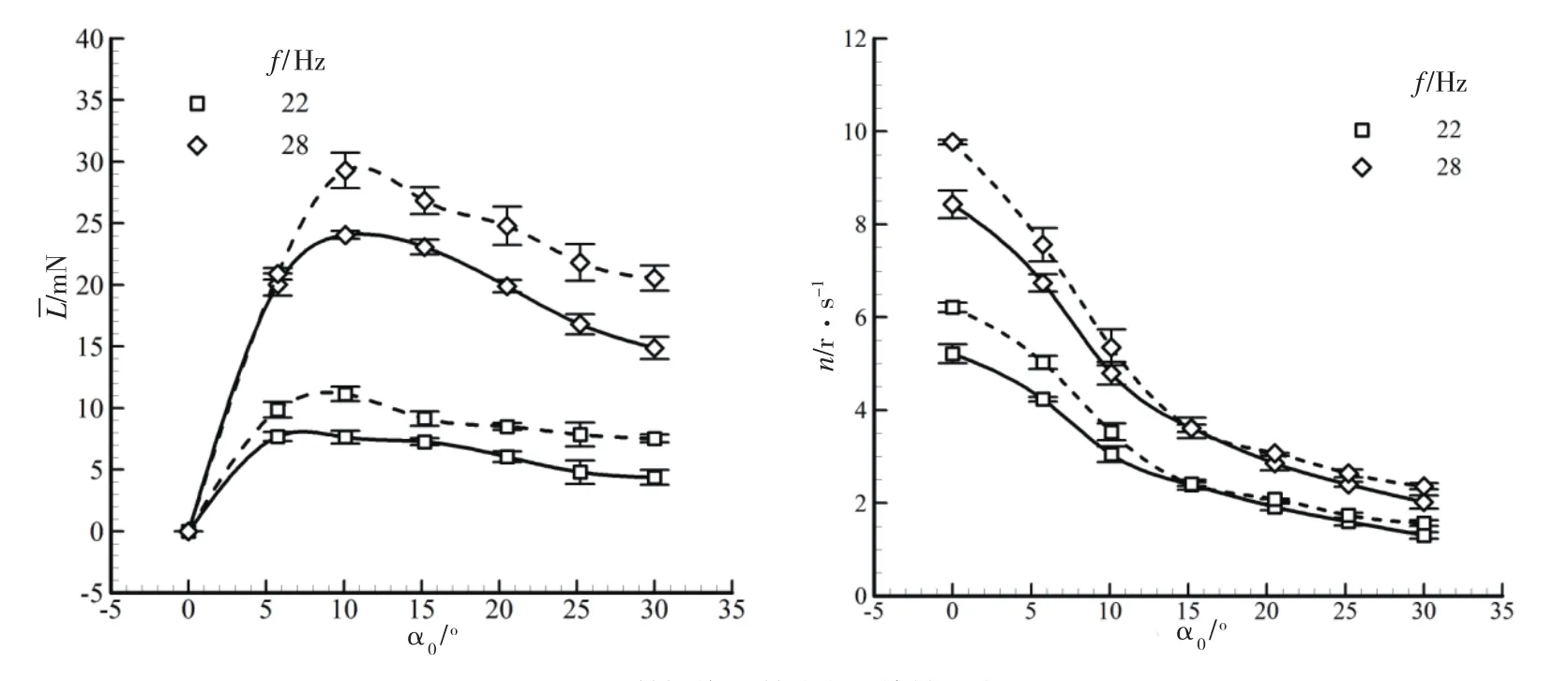
图15 开孔翼与普通翼升力及旋转速度对比Fig.15 Comparison of lift and rotating speed between perforated wing and intact wing
自然界中的昆虫飞行是动不稳定的,其稳定飞行需时刻进行增稳控制。扑旋翼结合了自然界中昆虫扑动与旋翼转动,其本体稳定性尚不清楚,因此需对其本体稳定性进行探究以为扑旋翼控制策略研究奠定基础。在弄清其稳定性之后,应结合扑旋翼悬停及前飞空气动力学原理开展飞行控制方法、控制策略的研究工作,明确用于飞行姿态控制的变量,并计算控制量变化对控制力矩的影响规律,最终据此设计控制率。最后还需通过机构实现上述控制运动,并开展试飞验证工作。
5 结束语
微型扑旋翼是近年来提出的一种新型仿生微型飞行器气动布局。该气动布局包含一对可绕中心轴旋转的扑翼,翼上下拍动产生的水平力矩驱动翼被动旋转,在翼拍动和旋转的过程中产生克服重力的升力。过去的十年间,学术界针对微型扑旋翼悬停状态下空气动力学开展了一系列研究,取得了一定的成果,为实现此类布局微型飞行器的成功飞行创造了条件。
过去的研究首先通过激光位移测量、高速摄像及空间重构技术获得了扑旋翼的运动及变形规律,从而为研究微型扑旋翼飞行器的基本气动特性并揭示其气动机理创造了条件。借助实验测量和数值仿真手段研究总结了微型扑旋翼飞行器拍动频率、初始攻角及旋转速度对扑旋翼升力及气动能耗的影响规律,从涡的演变机制上解释了扑旋翼气动力产生特点。上述原理的揭示为指导微型扑旋翼飞行器设计提供了一定的指导。为解决仿生微型飞行器初始设计阶段气动选型,并挖掘扑旋翼气动优势,系统对比了旋翼、扑翼及扑旋翼三类气动布局在升力产生及气动效率方面的差别,并明确了不同气动布局气动优势的设计参数范围。为进一步增加扑旋翼的升力,研究还探索了机翼开孔等多种扑旋翼设计方案。
未来仍需要进一步开展微型扑旋翼前飞状态的空气动力学研究以及飞行控制研究,为实现工程可应用的微型扑旋翼飞行器创造条件。
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
装备制造技术(2020年1期)2020-12-25 05:18:18
空间科学学报(2020年4期)2020-04-22 01:17:20
宇航总体技术(2019年5期)2019-10-11 07:32:56
电子制作(2019年9期)2019-05-30 09:41:48
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
北京航空航天大学学报(2016年3期)2016-02-27 06:32:03