太阳能无人机电气系统设计
2019-01-11 00:43:28孙立志
无人系统技术 2018年4期
孙立志,张 妍
( 海鹰航空通用装备有限责任公司,北京 100071)
1 引 言
随着电气、气动、结构等相关技术的突飞猛进和行业发展的迫切需要,近年来太阳能无人机分系统设备和系统集成技术日新月异。太阳能无人机以太阳光能作为能量来源,太阳能通过电气系统的转化,为动力电机提供可直接利用的电能,进而驱动螺旋桨,产生飞行所需动力。国内外有多款典型的太阳能无人机[1-2],在临近空间飞行和昼夜飞行等性能上相继有所突破。作为全电飞机,太阳能飞机上的电气系统至关重要,电气系统承担了能量转换、存储、变换、分配等一系列工作,因此,电气系统的设计关系到太阳能无人机的整体性能。
2 太阳能无人机电气系统特点
太阳能无人机的关键性能指标是飞行高度和航时,一款高空长航时太阳能无人机将会成为通信中继、军事侦察、环境监测等领域的可靠技术载体,但超长的留空性能需要足够多的能源和尽可能轻的机体结构,电气系统涉及能量流动的整个过程,其最优的设计将实现转化效率高、设备质量小的目的,为太阳能无人机的整机性能做出贡献[3-4]。
电气设备工作在高空低速的环境下,其可靠性、环境适应性等都备受考验。其中,可靠性大多依靠设备的冗余设计来保证,然而过度的冗余将造成设备质量的成倍增加,进而增加整机体积和质量,同时造成能源的过度消耗,直接影响留空时长。所以对电气设备的设计需要充分考虑质量和冗余之间的关系。
美国太阳神无人机采用分布式动力系统,即多台驱动电机分布于机翼,即使其中一台或几台故障,也能保证无人机有一定的动力继续飞行。但这种架构的无人机整体结构为柔性结构,空气动力性能存在未解决的问题。本文所涉及的无人机为刚性机体,电气系统架构也有所不同。
3 太阳能无人机电气系统架构
3.1 总体架构
电气系统作为太阳能无人机的一个重要系统,其架构的设计影响无人机的整体性能。太阳能无人机的电能来自于太阳能电池和储能电池,电能的产生、变换和传输由机上电气装置实现[5-7]。本文提出了一种太阳能无人机电气系统架构和电气设备质量与冗余之间的协调设计方法,能够在一定程度上解决太阳能无人机电气系统设计过程复杂、可靠性低的问题,且能够较好地协调电气设备质量和冗余备份之间的关系。
本文所设计的太阳能无人机电气系统由电机、电机驱动控制器、太阳能电池、最大功率点跟踪(Maximum Power Point Tracking,MPPT)控制器、电池、直流-直流(Direct Current,DC-DC)变化器、动力母线、设备母线、电气控制装置、用电设备等组成,如图1所示。系统各组成部分的数量用罗马数字示意,具体来说包括如下部分:动力子系统包括电机及相应的驱动控制器MC;能源子系统包括多组太阳能电池及相应的MPPT控制器,组数可以根据实际能量转换的需要进行拓展,同时包括多组储能电池,组数根据实际储能需要进行拓展;电源变换子系统中包括多组DC-DC,组数可以根据实际功率需要进行拓展;通过设备母线供电的多个低压用电设备,通过电气控制装置供电的多个低压用电设备,其中有关供电的区别在子系统中详细讨论。
3.2 动力子系统设计
在动力子系统中,电机Ⅰ和电机Ⅱ在机械上同轴连接,共同输出机械功率,带动螺旋桨旋转,相应的电机驱动控制器MCⅠ、MCⅡ连接在动力母线上,独立运行,分别驱动控制电机Ⅰ和电机Ⅱ,如图2所示。对于高空太阳能无人机,甚至临近空间太阳能无人机,为了提高动力子系统的效率,往往需要设计变距机构,因此动力子系统还包括变距电机及控制器。而变距电机所需驱动功率较小,可以通过设备母线供电。
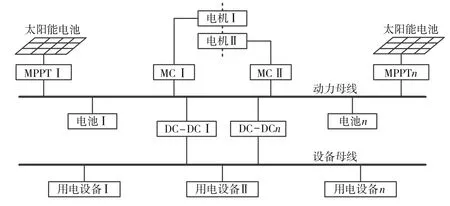
图1 太阳能无人机电气系统架构Fig.1 Electrical system architecture of solar UAV
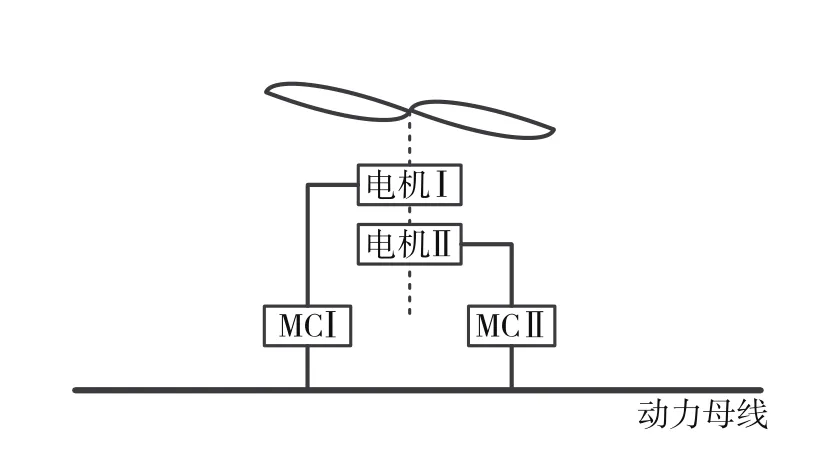
图2 太阳能无人机动力子系统Fig.2 Power subsystem of Solar UAV
电机Ⅰ和电机Ⅱ的功率应按设备质量和冗余备份之间的协调关系设计。具体来说,设计中要求电机Ⅰ和电机Ⅱ结构相同,分别由电机驱动控制器MCⅠ和MCⅡ进行驱动控制,两个驱动控制器互相独立,二者功率之和大于等于无人机螺旋桨所需最大机械功率值,二者同轴连接,工作时输出相同转矩,合成后输出无人机飞行所需动力。这样,在其中一台电机或其控制器故障时,另一台电机能够输出约半数额定功率的动力,能够保证无人机有一定的动力进行返航。同时,这种设计减少了动力子系统的质量,没有过度增加无人机的负担,对保证太阳能无人机的长航时飞行起到重要作用。
3.3 能源子系统设计
在能源子系统中,太阳能电池及其相应的MPPT控制器在结构上左右对称分布于无人机,敷设在左右机翼和水平尾翼上,其中太阳能电池和MPPT控制器Ⅰ至n代表的是n个相同功率的太阳能转换单元。在功能上,MPPT控制器可以实现跟踪太阳能电池的最大输出功率,以确保太阳能转换的高效性。这n组MPPT控制器连接在动力母线上,将太阳能转换为电能,传输至动力母线。而太阳能电池的敷设数量需综合考虑无人机的结构和机上用电设备所需电功率。
在太阳能无人机上,储能电池的分布和太阳能电池、MPPT类似,左右对称分布于无人机机体结构上,用于储存电能,储能电池连接在动力母线上,为全机电气设备供电。其中,电池Ⅰ至电池n代表了n个相同功率的电池单元,并且电池单元包含电池管理系统BMS。电池单元的安装数量需要综合无人机质量和航时权衡而定,这是因为在太阳能无人机上,能源子系统基本占到无人机总重的1/3~1/2,在能量密度难以增加的情况下,应尽量优化所携带电池的数量。太阳能无人机能量流动的状态在不同光照条件下有明显不同,在太阳能充足的环境中,太阳能电池同时给储能电池充电和机上设备供电,在夜间飞行时,只有储能电池单独为飞机供电,图3为太阳能无人机的能量流动关系[8-10]。
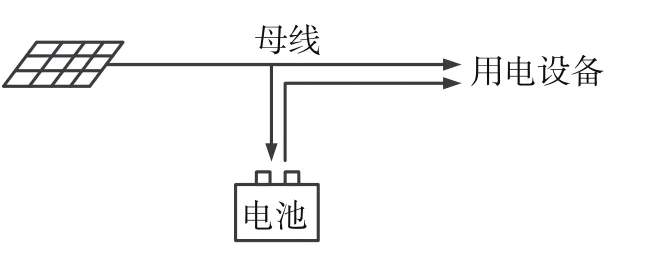
图3 太阳能无人机能量流动关系Fig.3 Energy flow relationship of solar UAV
3.4 电源模块设计
在电源模块中,DC-DC变换器的数目为偶数,结构上左右对称分布于无人机,同时连接动力母线和设备母线,将动力母线的高压直流电转换为设备母线的低压直流电,如图4所示。DC-DCⅠ至DC-DCn的功率按设备质量和冗余备份之间的协调关系设计。
电源模块中DC-DCⅠ至DC-DCn代表n个相同功率的电源模块,其功率大于等于机上低压用电设备所需最大功率之和,同时还需考虑某些用电设备的特殊性能,如舵机在工作时可能产生冲击,因此应使电源模块总功率大于所有低压用电设备的峰值功率,且留有一定的余量[11]。多个电源模块设计的优点在于,当其中某个电源模块出现故障但其它模块正常工作时,可以断开非必需设备的供电,保证无人机在最小系统情况下返航,同时没有过度增加无人机的质量,保证无人机的长航时飞行。
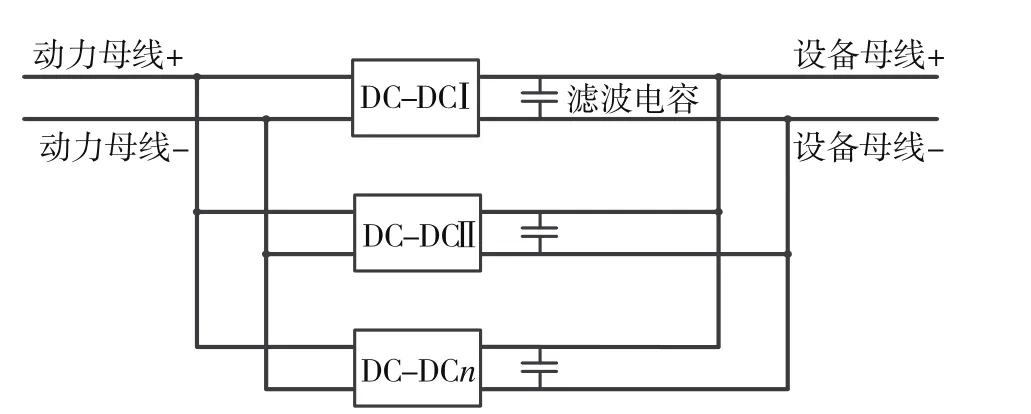
图4 太阳能无人机电气系统电源模块Fig.4 Power module of solar UAV electrical system
3.5 直流母线设计
电气系统中有两条直流母线,分别是动力母线和设备母线,动力母线是能源子系统和动力子系统间电能传递的通路,为无人机的驱动电机供电;设备母线是机上各低压用电设备的电能传递的通路,为低压用电设备供电,这些设备包括飞控系统、起降系统、测控系统等的低压用电设备。单独设计直流电压相对较高的动力母线是因为驱动电机是永磁同步电机,其要求驱动器的母线电压尽量高,且因驱动电机功率较大,耗电量大,提高母线电压能够适当减小母线电流,降低系统压力。
3.6 电气控制装置与低压用电设备设计
设备母线为电气控制装置和用电设备Ⅰ、用电设备Ⅱ、用电设备n直接供电,而电气控制装置控制用电设备Ⅲ、用电设备Ⅳ的供电,如图5所示。电气控制装置通过信号线检测用电设备供电状态。
由设备母线直接供电和由电气控制装置供电的区别在于机上低压设备供电是否可控。具体来说,无人机飞行任务期间持续不断供电的设备,如飞控计算机等,直接由设备母线供电,而空速管等设备,不需要整个飞行过程连续供电,因此由电气控制装置控制其供电的通断,这样既可以保证电气系统设计的简单可靠,又可以节省电能。
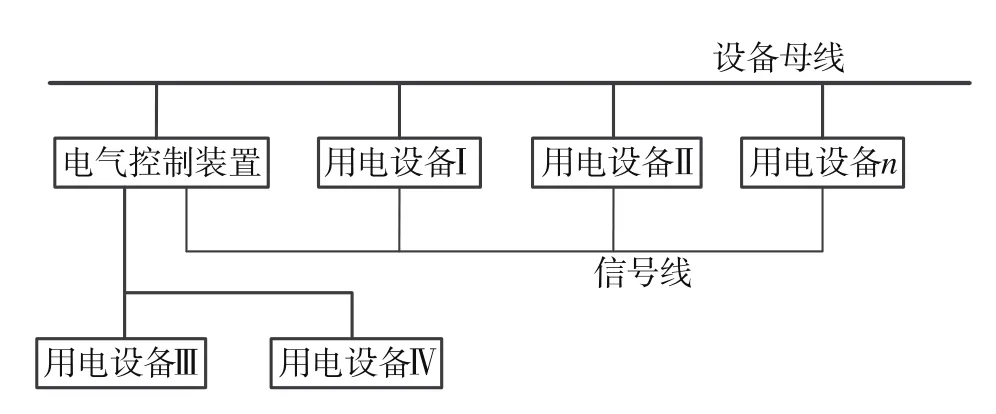
图5 太阳能无人机电气系统设备母线与用电设备连接关系Fig.5 Connection between equipment-bus and electrical equipment of solar UAV electrical system
4 结 论
综合考虑无人机机体质量、设备冗余关系等因素,设计了一种太阳能无人机电气系统的通用架构,在实现无人机电气系统可靠设计的同时,能够充分协调电气设备质量和冗余的关系,在保证无人机飞行性能的前提下,可以有效增加飞行航时,为高空太阳能无人机电气系统的设计提供了思路。
猜你喜欢
经营者(2023年10期)2023-11-02 13:24:48
科学大众(2022年23期)2023-01-30 07:03:44
舰船科学技术(2022年21期)2022-12-12 08:06:44
中国化肥信息(2021年12期)2021-04-19 12:25:22
中学生数理化·中考版(2020年12期)2021-01-18 06:59:44
铁道通信信号(2020年3期)2020-09-21 09:13:00
小学生必读(中年级版)(2018年10期)2019-01-04 05:11:10
铁道通信信号(2018年8期)2018-11-10 05:15:44
小哥白尼(趣味科学)(2018年4期)2018-06-21 06:23:30
发明与创新(2016年6期)2016-08-21 13:49:36