
一种光伏阵列实时状态监测与故障定位系统
2019-01-09 12:52韩付昌陈志聪吴丽君俞金玲林培杰程树英吴勇标
福州大学学报(自然科学版) 2018年6期
韩付昌, 陈志聪, 吴丽君, 俞金玲, 林培杰, 程树英, 吴勇标
(福州大学物理与信息工程学院, 微纳器件与太阳能电池研究所, 福建 福州 350116)
0 引言
为解决日益严峻的能源短缺和环境问题,并网光伏发电技术得到迅速发展. 光伏系统没有移动部件, 维护成本较低, 但它们长时间暴露在复杂的户外环境下, 经受各种恶劣环境因素的影响, 会导致各种各样的故障. 这些故障不仅会造成功率损失,影响发电效率,还会缩短组件的使用寿命, 严重时局部的过热甚至会引发火灾, 给光伏电站带来不可估量的损失. 传统光伏系统的日常维护主要依靠人工定期检查,费时费力,人工成本昂贵. 因此,寻找一种光伏阵列实时监测并快速准确地检测、 定位故障光伏组串的新方法是十分必要的.
近年来,国内外很多学者对光伏阵列的状态监测和故障定位进行了相关研究. 在状态监测方面: 常规监测系统使用数据记录器或微控制器来测量和获取信号, 但以高采样率进行数据采集时, 串行端口的数
据传输是有限的,并且难以实现对程序的修改. 基于NI数据采集卡和LabVIEW软件[4-5]的状态监测系统可实现大多数的测量任务,能够监控电流、 电压、 功率等参数及变化情况. 但也存在一些不足,如LabVIEW软件不擅长大数据处理任务,无法实现底层操作等. 相比LabVIEW软件, Matlab以其大量稳定可靠的算法库、强大的科学计算功能、 编程效率高等特点已成为数学计算工具方面事实上的标准. 本研究将电气数据监测、故障定位等功能集成到统一的Matlab平台, 实现一体化管理. 在故障定位方面:高斯过程回归分析法可实现故障定位, 但环境适应性差,只适用于小规模的故障检测. 红外图像检测法利用组件温差特性实现故障定位, 但检测精度不够高,实时性较差,设备费用昂贵. 多传感器法通过分析光伏电气特性数据实现故障定位,但是所用传感器数量较多、 故障定位精度较差、 容易受外界环境因素影响、 难以在大规模光伏阵列中推广. 对地电容测量法和时域反射分析法[10]都需要离线操作,效率较低,适用范围较小,只适用于串联光伏电路, 对测量设备的精度要求很高. 文[11]通过分析组件位置信息实现故障定位,但其故障识别方法要选取精确的限定值. 文[12]采用离散小波变换分析接地故障位置,但小波变换系数的冗余度较大. 文[13]将故障阵列的IV曲线分为高压故障诊断和低压故障诊断两部分,但在大规模光伏阵列中难以推广. 机器学习算法也被提出用于光伏系统的故障检测:如决策树模型[14]、人工神经网络[15]、 极限学习机[16]、 基于图的半监督学习模型[17]等. 然而这些方法计算复杂性高,可能需要长时间的训练过程(如几天甚至几周), 而且训练模型只适用于特定的光伏系统, 应用范围较小.
1 系统组成
光伏阵列、 电路开关、 汇流箱、 并网逆变器、 电源、 数据采集卡、 Matlab上位机、 电压电流传感电路构成了该光伏阵列实时电气数据监测和故障定位系统, 如图1所示.

图1 光伏阵列实时状态监测与故障定位系统Fig.1 Real-time status monitoring and fault location system for photovoltaic arrays
本研究光伏阵列采用了18块型号为GL-M100太阳能组件, 分成3个组串, 每个组串采用6块组件串联, 组成6×3的串并联连接方式. 逆变器采用的型号为GW2000-NS, 供电电源采用型号为QJ-3003SⅡ的直流稳压电源, 数据采集卡选用Measurement Computing公司的高速多功能USB-1608G, 采样硬件电路采用隔离型的LV-25P霍尔电压传感器和HBC-LSP电流传感器进行光伏阵列的电压和各个组串电流的检测. 光伏组件(STC条件下)具体参数如下:P峰值=100 W,Umpp=17.5 V,Impp=5.71 A,Voc=21.5 V,Isc=6.03 A.
2 Matlab上位机

图2 Matlab上位机数据管理中心Fig.2 Matlab data management center in PC
通过Matlab/GUI设计了如图2所示的上位机数据管理中心, 主要用于数据采集卡的采样方式设定、 量程选择、 单位转换、 采样率设定、 模式设定、 通道使能设置等, 以及读取系统时间、 导入MySQL、 故障检测定位、 显示和处理数据. 用户在统一的Matlab平台进行多种功能的选择和设定, 实现对光伏发电阵列的一体化管理.
为保证数据采集的实时性和完整性, 设计了连续采集功能. 另一方面, 为尽量减少采样数据量, 避免过量采样数据给系统造成的不必要负担, 设计了间歇采集功能, 并且采集占空比可调, 扩展性强(例如, 间歇采集的触发周期可设置为气象站采集器的记录间隔, 实现与气象信息的同步采集). 采集卡在间歇期间完全停止运行, 使其在运行时功耗大为降低. 两种采样方式可随用户需要进行选择.
在一些监测场所, 需要状态监测系统在无人监管的情况下自动定时监测某一时间段中的特定数据. 因此, 上位机数据管理中心设置了自动定时采集功能, 在设置采样参数后进入自动运行模式, 实现对多路光伏组串状态的自动定时监测, 而且定时时间可随需要调整, 允许实时快速检测而无需人为干预, 系统采用免费的 MySQL数据库作为后台支撑, 实现自动存储、 修改、 导出、 打印等多种功能. 开发的系统在将来有望实现便携式, 可用于户外电站实时状态监测. 例如将故障定位算法移植到嵌入式开发平台, 并嵌入到汇流箱, 实现智能汇流箱的设计; 利用ZigBee等无线通信技术实现智能汇流箱与PC端的信息传输; 将故障定位算法移植到组串式并网逆变器中, 与最大功率点跟踪(MPPT)算法进行融合等.
3 离群值简介与故障定位
3.1 离群值简介
离群值通常被定义为数据集中与众不同的数据. 对一个数据集{xi},i=0, 1, 2, …,n, 有一个参考值x0, 变化的尺度ζ, 阈值参数α. 如果xi满足式(1)条件时, 统计异常规则将xi判为离群值.
xi-x0>αζ(1)
离群点检测规则的上下限分别为x0+αζ,x0-αζ. 对于光伏应用, 假设光伏组串在相似的环境条件下具有相同的输出电流, 如果某串电流明显偏离其他正常组串电流, 则表现不佳的光伏组串可被视为故障组串. 将组串电流作为测量参数来实现故障定位是非常方便的, 因为每个组串共享相同的阵列电压, 而它们的电流可以不同[18]. 因此, 一些基于组串电流的故障检测算法或技术被提出, 如: 局部离群因子(LOF)[18],t检验统计分析并行检测算法[19], 基于组串电流的元启发式优化技术[20]等. 本研究基于组串电流特征, 采用一种“阈值法-Hampel辨识法”相结合的光伏阵列离群值检测算法进行故障检测与定位, 是一种可选的方案. 若光伏阵列中组串的数量为n, 如果一个光伏组串出现故障, 则遭受的异常污染率等于1/n, 离群值检测的成功在很大程度上取决于数据遭受的异常污染水平. 值得注意的是, 若组串处于不同日照条件、 不同平面情形或阵列出现大规模故障等, 那么在某种程度上就会增加故障检测的复杂性, 从而影响诊断的准确率. 这时, 需综合考虑环境温度、 组件温度、 辐照度、 风力等环境因素的影响, 结合相同环境下的参考板电气特性数据, 采用信息融合与模糊推理等方法, 实现故障的检测与定位.
3.2 故障定位算法
本实验中光伏组串数量为3, 在光伏组串污染水平非常高(如33.3%)的情况下, 想要比较准确地检测出故障组串, 必须选用对离群值有较高容纳度的离群值检测算法.
初中音乐课堂教学普遍存在着课时缺乏的现象,一般在进行相关教学的过程中,一周只有一节课程属于音乐课程。且在很多时候的很多地方,学校整体形成的思维模式就是音乐课程是一门附属课程,不属于主课范畴。这种认知也导致很多地方的音乐课程长时间被语文、数学、英语这类主要课程所霸占,导致学生对整体音乐课程的认知停留在存在与不存在之间,这种情况普遍存在于全国各地学校的教学中。
(2)
但是3-Sigma规则很有可能在实践中表现不佳, 因为当样本量很小时, 异常值的存在会使方差估计变大, 只有极少离群值被检测. 因此, 当使用均值作为参考指标时, 必须考虑以下三个问题. 首先, 它假设分布是正态的(包括异常值); 其次, 均值和标准差极易受到异常值的影响; 第三, 这种方法不太可能在小样本中检测出离群值[21]. 3-Sigma规则在异常污染水平大于10%时可能失效[22].
箱线图法使用四分位箱线图, 利用下四分位数(Q1, 25%), 中位数(或Q2, 50%), 上四分位数(Q3, 75%), 四分位距(IQR =Q3-Q1). 箱线图离群值规则可以表示为:
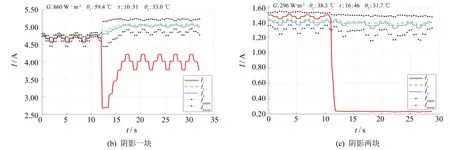
xi>Q3+1.5IQR∪xi 箱线图法根据实测数据进行离群值分析处理, 以四分位数和四分位距为基础, 具有较强的鲁棒性. 与3-Sigma规则不同的是, 箱线图的数据不必服从某种特定的概率分布, 但当数据遭受的异常污染水平大于25%时, 箱线图法可能会失效[22]. (4) 样本中值就像均值一样, 是一种衡量集中趋势的指标, 但它提供了一种优势, 即对存在的异常值非常不敏感[21]. 更重要的是, 中位数的崩溃污染率为50%, 即有50%的数据受到污染时, 也能得到可靠的解, 这意味着它可以抵抗高达50%的异常值. Hampel辨识法具有最低的异常值敏感性, 可以抵抗高达50%的异常值, 理论上可以检测出离群值. 但实际上, Hampel辨识法在正常情况下可能会触发虚假警报[18]. 由于组件封装工艺不良、 组件功率偏差等原因, 不同的光伏组串电气性能不可能绝对一致, 不同的组串间必然存在输出电流偏差, 在方差很小的情况下, 导致一个更严格的离群值检测规则. 因此通过Hampel辨识法求出的上下限区间外的可疑异常点中可能会存在正常数据点, 从而出现虚警的情况. 为解决这个问题, 一种方法是放大Hampel的上下限, 但是潜在的缺点是可能会丢失异常值. 由于组串参数的合理值只能在一个特定的范围内, 如果其输出的结果不在这个范围内, 那肯定是离群值. 因此, 选取并确定一个合适的组串电流离散率阈值来对可疑异常点进行最终判决. 离散率通过组串电流的标准差与组串电流平均值的比值计算, 离散率越低, 说明各路组串发电性能越集中一致性越好. 根据光伏电站生产运维指标和文[23]研究, 若组串电流离散率取值范围在0~5%以内, 说明光伏阵列各个组串运行稳定; 若组串电流离散率取值在5%~10%以内, 说明光伏阵列各个组串运行情况良好; 若组串电流离散率取值在10%~20%以内, 说明光伏阵列运行情况有待提高; 若组串电流离散率超过20%, 说明光伏阵列运行情况较差, 影响电站发电量, 必须进行整改. 本研究离散率阈值确定为5%, 以此对出现虚假警报的可疑异常值进行最终判决, 若其电流离散率超过所规定的阈值5%, 则认为是离群值, 算法流程图如图3所示. 图3 算法流程图Fig.3 Algorithm flowchart 采用“阈值法-Hampel辨识法”相结合的离群值检测算法, 在Hampel辨识法检测的基础上结合阈值, 利用阈值法判定最终的异常点. 光伏并网运行中, 常见的故障包括线线故障、 接地故障和失配故障(例如开路故障、 部分阴影、 老化故障)[24]. 线线故障是光伏阵列中具有不同电位的两个点之间的偶然短路. 接地故障主要由于电缆的绝缘层损坏, 导致光伏阵列中某些组件的连接线与支架相连. 失配故障发生在部分组件与其他组件在电气参数上产生较大的不一致. 在这些故障中, 本研究重点创建了线线故障和失配故障, 因为传统保护装置更难检测它们. 创建的具体故障包括: 组串级线线故障, 即组串中短路组件的数量为1块和2块; 阵列级线线故障, 即短接不同组串中电势差为1块和2块组件工作电压的电位点; 老化故障, 即组串老化4欧和阵列老化4欧; 阴影故障, 即组串中阴影组件的数量为1块和2块; 开路故障, 即断开某一组串中组件间的连接线. 故障创建的原理图如图4所示. 图4 光伏阵列故障原理图Fig.4 Photovoltaic array fault schematic diagram 实验选取在晴天的不同时段进行, 数据采样率选择1 kHz, 采样方式选择连续采集, 以较好地完成低通滤波、 抑制工频干扰、 提高信号保真度. 基于实验室光伏并网发电平台上的故障模拟, 记录每种工况的组串电流和检测条件, 其中组串电流分别以I1,I2,I3表示, 检测条件包括: 辐照度(G), 组件温度(θ1), 检测时刻(t), 环境温度(θ2). 为详细直观地判断是否发生故障, 将检测条件、 组串电流I1~I3以及Hampel辨识法所求得的上限电流(Iupper)和下限电流(Ilower)都显示于同一图中. 4.2.1 正常 图5 实验结果: 正常运行Fig.5 Experimental results: normal operation 4.2.2 线线故障 为更好地观察故障发生前后的电流变化情形, 线线故障通过使用可控开关使不同电位点在特定时刻短路实现, 实验结果如图6所示. 其中图6(a)和(b)为组串级线线一块和两块组件, 图6(c)和(d)为阵列级线线一块和两块组件. 不难发现, 组串级线线一块和阵列级线线一块故障发生后, 故障组串的电流迅速低于Hampel辨识法的下限电流并且减小至某个大于零的最低值, 同时在MPPT作用下, 电流值逐渐上升并到达一个新的稳定值, 这个稳定值未超过Hampel辨识法的下限电流值, 仅凭借Hampel辨识法便可迅速实现其故障检测与定位. 而组串级线线两块和阵列级线线两块故障发生时, 故障组串的电流迅速低于Hampel辨识法的下限电流并出现较大的反向电流, 这种反向电流会对组串中的其它组件造成极大损坏, 同时在MPPT作用下达到一个新的稳定值, 而Hampel辨识法由于具有较低的异常值敏感性, 其上下限电流完全不受其影响, 产生的新稳定值仍低于Hampel辨识法下限电流, 因此Hampel辨识法成功判断光伏阵列是否出现故障并迅速准确地定位故障组件. 图6 线线故障的实验结果Fig.6 Line-line faults of experimental results 4.2.3 失配故障 失配故障如图7所示. 其中图7(a)开路故障通过使用可控开关使光伏组串的组件连接线在特定时刻断开实现; 图7(b)和7(c)阴影故障通过使用半透明的亚克力板在特定时刻遮挡组件实现; 图7(d)和7(e) 老化故障通过使用可控开关和大功率铝壳电阻使光伏组串或光伏阵列的输出端在特定时刻串联接入阻值为4 W的大功率铝壳电阻实现. 开路故障以及阴影两块故障发生后, 如图7所示, 故障组串电流迅速低于Hampel辨识法的下限电流并且减小至零或接近于零, 可以被Hampel辨识法检测到, 而其它正常组串电流基本不变; 阴影一块故障和组串老化故障发生后, 故障组串电流迅速低于Hampel辨识法的下限电流并通过MPPT达到新的稳定值, 可以被Hampel辨识法检测到, 但是阴影故障发生前, 由于Hampel辨识法上限电流的敏感性, 正常组串电流值超出Hampel辨识法的上限电流, 导致虚假警报; 阵列老化故障发生后, 所有组串电流迅速减小并通过MPPT达到新的稳定值, 但由于Hampel辨识法下限电流的敏感性, 正常组串电流值低于Hampel辨识法的下限电流, 导致虚假警报. 将离散率阈值确定为5%, 以此对出现虚假警报的阴影一块故障和阵列老化故障进行最终判决. 阴影一块故障发生前, 如图8所示, 其组串电流离散率未超过阈值5%, 阈值法最终将其判定为正常状态, 这一点与实际工况相吻合; 同时阴影一块故障发生后, 故障组串是低效的, 并且这种状态都不会改变, 其电流曲线将明显偏离正常曲线, 组串电流一致性较差, 光伏阵列整体运行情况有待改善, 这时其组串电流离散率超过阈值5%, 直至故障被清除. 而阵列老化故障发生后, 其组串电流离散率未超过阈值5%, 这是因为各组串具有相同程度的老化模拟, 电流一致性较好, 阈值法最终将其判定为阵列老化. 因此, 在Hampel辨识法检测的基础上结合阈值, 利用阈值法判定最终的可疑异常故障, 有效避免了故障误判. 图8 阈值分析Fig.8 Threshold method analysis 为及时发现光伏阵列中的潜在性故障和保证发电系统安全、 稳定运行, 开发了一种可以定时启动的光伏阵列实时状态监测和故障定位系统. 该系统将连续采集、 间歇采集、 自动定时采集、 故障检测与定位、 数据库等多种功能集成到统一的Matlab平台, 采用“阈值法-Hampel辨识法”相结合的离群值检测算法实现故障检测与定位, 允许实时快速检测而无需人为干预, 有望实现便携式, 可用于户外电站实时状态监测, 从而实现对光伏发电阵列的一体化管理. 大量的现场实测分析结果表明此方法具有很好的检测效果, 可以更有效地利用正常组串的信息实现故障组串定位. 但由于光伏阵列受环境因素影响很大, 若组串处于不同日照条件、 不同平面情形或阵列出现大规模故障等, 那么在某种程度上就会增加故障检测的复杂性, 进一步的工作是综合考虑辐照度、 环境温度、 组件温度等环境因素, 采用信息融合等机器学习算法进行故障检测定位, 并对这些故障进行细化分类, 进而实现故障类型的诊断.
4 实验搭建与结果分析
4.1 故障创建

4.2 实测结果分析






5 结语
猜你喜欢
计算机与现代化(2022年10期)2022-10-18
能源工程(2022年2期)2022-05-23
作文大王·低年级(2021年3期)2021-03-09
重型机械(2020年2期)2020-07-24
装备制造技术(2019年12期)2019-12-25
动漫界·幼教365(中班)(2019年12期)2019-02-04
小型微型计算机系统(2018年8期)2018-09-07
读写算·小学低年级(2017年3期)2017-03-22
中国房地产业(2016年9期)2016-03-01
太阳能(2015年11期)2015-04-10
