基于舰艇火灾红外超早期探测系统的热故障判定
2019-01-08 01:56,
船海工程 2018年6期
,
(中国船舶重工集团公司 第七二六研究所,上海 201108)
由于舰船结构特殊,舱室分布集中,人员密集,容纳空间有限;舱室中长时间运行高电压、大电流的机电装备;装备电缆、电线遍布全船,成为火灾高发地。舰船火灾发展初期阶段是舰艇火灾防治的关键时期,其火灾探测性能对后续火灾扑救具有重大影响。为了提高对舰艇火灾的预防和控制能力,必须抓住舰艇火灾发生发展的关键环节,实现舰船火灾超早期的探测,提高对舰船火灾的控制[1]。通过研究实现了红外热成像系统的热故障判定功能,该功能可以实现对设备的工作温度实时监测。
1 研究目的
红外热成像系统作为一个智能化、自动化的检测技术,能够快速准确地探测到被测目标的温度变化情况,并将其转化为温度值图像。设计的红外热成像系统能实现准确快速地对被测目标进行温度测量,并能够进行预警报警功能。
利用红外热像技术的热故障判定功能,实现对设备的工作温度进行实时监测[2-5]。
2 红外热成像系统热故障判定
文中的热故障判定算法是基于研发的红外热成像系统。该红外热成像系统能够准确地测量被监测目标的温度并输出红外热图像,通过红外热图像和测温功能,基本上可以快速地诊断出即将发生的或者已经发生的故障位置所在,系统具有温度报警功能,便于值班人员及早发现故障和隐患,并及时采取措施来消除故障或隐患。
由于被监测的范围内会有多个被监测目标,所以需要将被监测范围内出现异常的设备都实现故障报警,并能确定故障报警设备的位置。红外热成像系统能够测量出被监测范围内任一点的温度值、被监测范围内的最高温度值Tmax、最低温度值Tmin、平均温度值,由于需要关注高温物体,所以需要的是测量点的温度值Tmean、被监测范围内的最高温度值Tmax。
红外热成像系统采用的红外探测器为384×288像素焦平面阵列,当有高温物体进来,按照图1的算法,系统可以测量出被监测范围内的最高温度值,并将最高温度值分布的位置的直方图分布、方差分布求解出来。当有高温物体出现时,会发现最高温度值所在的位置的方差值急剧变小并且相对稳定,见图2、3,表明红外热成像系统测量出来的最高温度值确实是由于某个设备出现异常导致的高温存在,而不是外界干扰或者信号出现干扰而造成的虚假高温值。
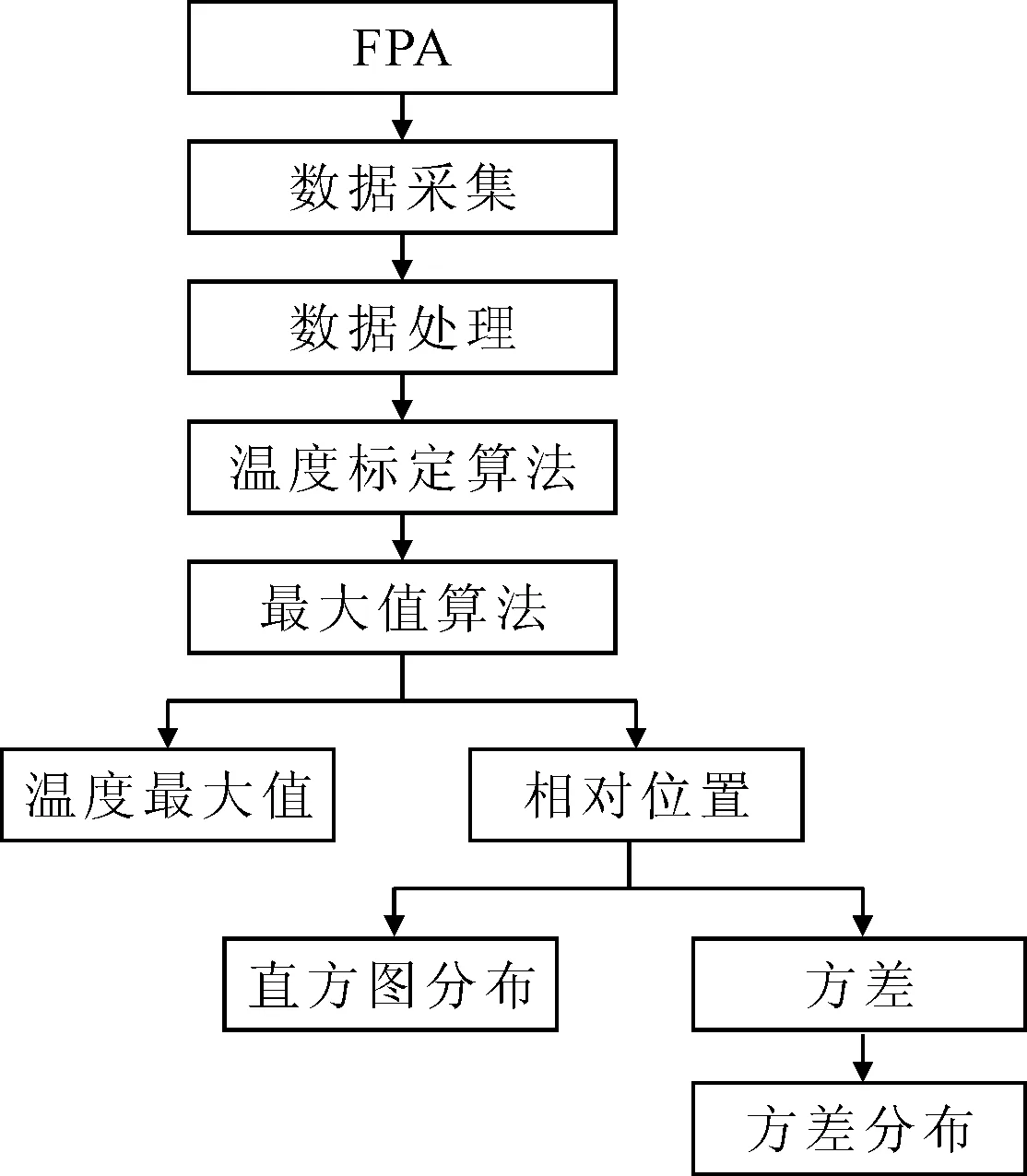
图1 确定高温物体随处位置的算法
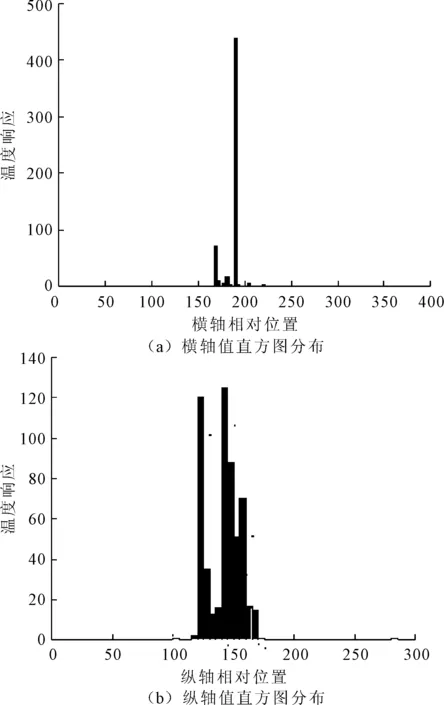
图2 最高温度值的直方图分布
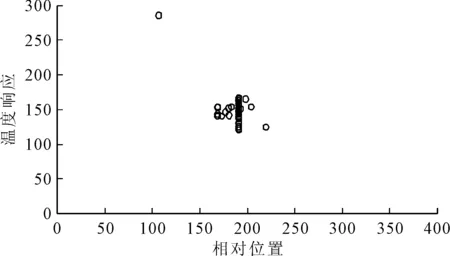
图3 最高温度值的方差分布
最高温度值所处位置的方差分布可以作为高温物体存在的判定依据,但是由于被监测范围较大,被监测的设备数目的不确定性,不同的设备的故障表现形式不一样,不同设备的工作温度和要求的温升都不相同,在算法上实现较为繁杂。故将图像分割成更小的区域,然后对每个小区域进行监测,由于区域小,被监测的目标单一或者只监测设备的某一个部位,则外界的干扰少,算法的实现简单,具体的实现算法见图4[6-9]。
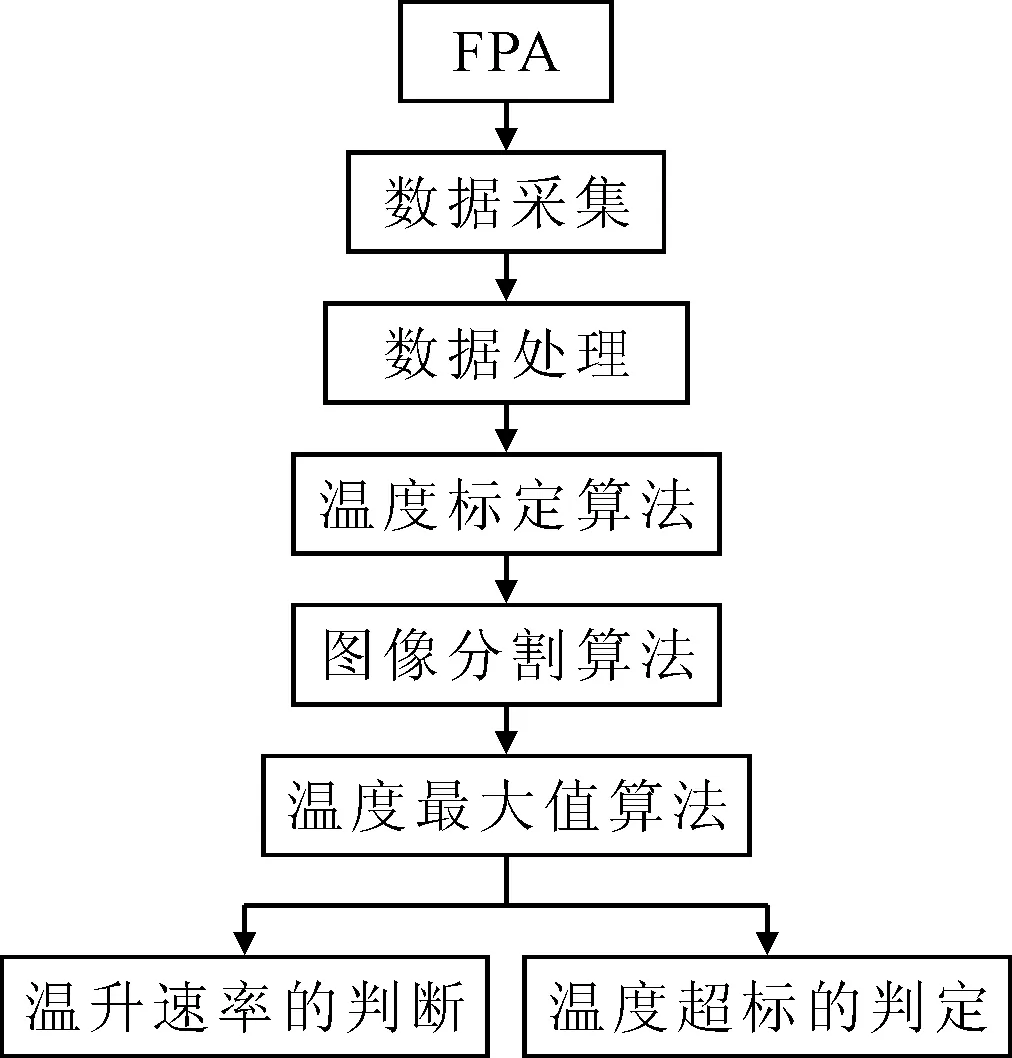
图4 温度报警的算法实现
将整个焦平面阵列分割为6个区域,见图5。对每个区域测量最高温度值Tmax(i)(i=1,2,3,4,5,6)。由于图像的分割,所以可以在每一个分割的区域都能确定是否存在高温物体,并能快速获取到该区域的最高温度值。该最高温度值即该区域被监测目标温度最高的目标的温度值,这样就可以为大致定位到该区域高温物体所处的位置。通过对被监测目标的温升速率和温度是否接近设备能承受的最高温度值,判定被监测目标是否出现异常。
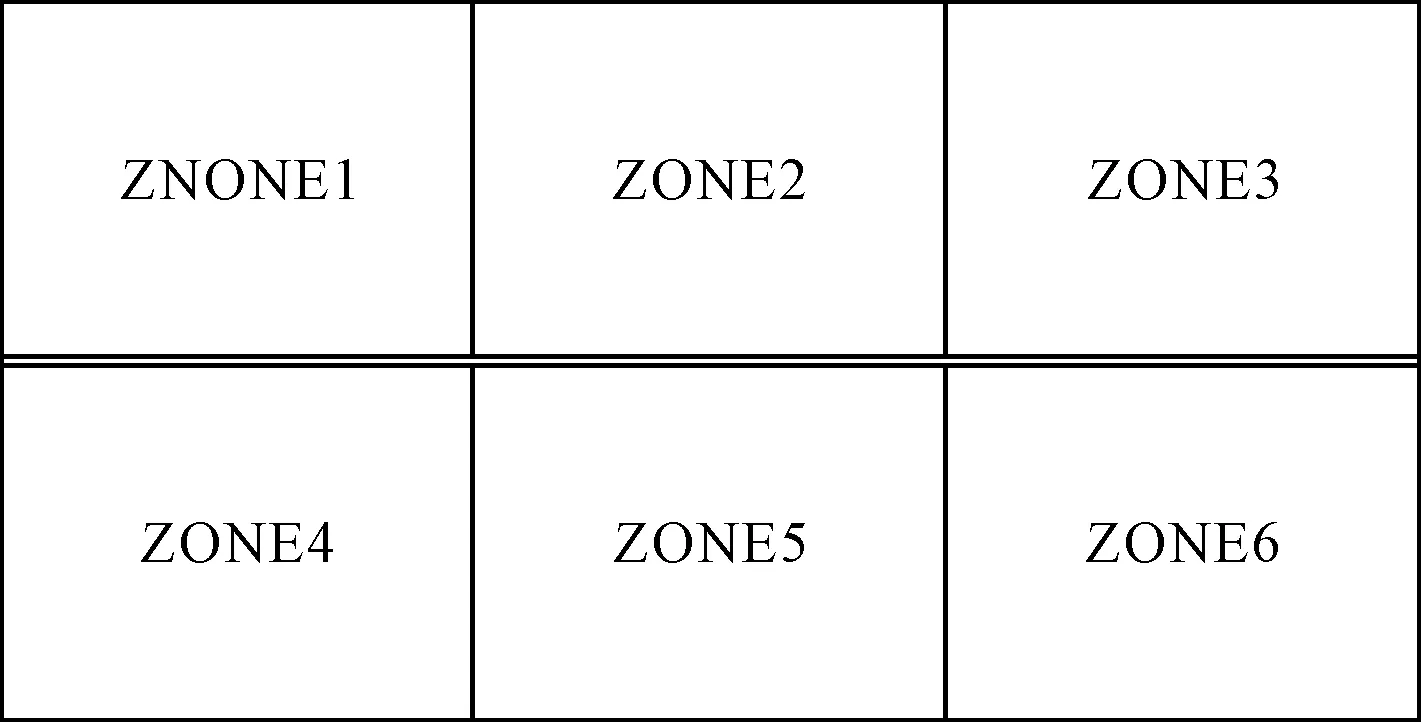
图5 图像分割
3 热故障判定功能应用
通过分析建立舰艇典型热故障发生、发展的特征模型,提出4种比较典型的舰艇火灾场景。
3.1 被监测目标温升过快引起报警功能的测试
舰船上的电池舱,若电池出现短路或者接口松动,温度会极速上升,导致电池爆裂,从而产生火灾事故;轮机舱和动力机舱,若轮机或者电机由于异常故障、转速过快等导致温度急剧上升,很容易导致较大故障或者火灾发生。针对由于故障或者异常导致的设备温度出现极速上升的现象,需要进行密切监测并及时采取处理措施。红外热成像系统实现了被监测目标温升的监测,如果温升速率达到T1(单位℃/s),则系统会报警,T1可以通过温控红外黑体上位机界面进行设置。
基于此,他认为很多关键零部件技术和平台技术必将迎来巨大发展,包括:新能源汽车“三电”技术、能源管理技术、智能网联汽车“零部件”技术、L3和L4自动驾驶芯片技术、5G与V2X物联网技术、智能汽车计算平台技术、汽车专有云技术、AI人工智能技术、汽车安全技术、汽车系统集成技术以及新概念汽车等。
3.2 被监测目标温度超过正常工作温度引起的报警功能的测试
动力和照明线路采用的橡胶绝缘电缆在使用过程中,由于橡胶的氧化分解作用,使硫化橡胶的电物理和机械性能发生变化:变硬、变脆,在橡皮上形成裂纹,空气和水分填充在裂纹中使电缆老化加剧,最终导致绝缘击穿和短路。由于接地故障、短路故障、闪络性故障(绝缘击穿)、电缆老化导致的电缆故障,导致温度异常。由于舱内空间的狭小,很难发现电缆隐患和故障点,利用红外热像仪进行温度监测并利用故障报警功能,可以及时发现隐患和故障,对于预防火灾是一个非常重要的手段。该红外热成像系统能够对被测目标进行实时监测并实现温度的实时测量,如果温度达到某一设定值T2,则会发出预警信息,如若温度达到某一温度值T3则会报警,T2和T3可以通过界面进行设置且T3>T2。
3.3 多个被测目标同时报警的测试
由于舰船舱室空间狭小,需要被监测的设备较多。该热像仪对5 m范围以内的设备都能进行监测,可以对需要监测的设备如电器柜、电缆、电机等同时进行监测。如果同一时间多处电缆、多个设备出现故障,该热像仪能够同时实现报警,管理人员根据红外热图像和报警信息即可确定报警位置。
3.4 手动关闭报警的测试
舱室内设备较多,不同设备的正常工作温度和有效温升不一样,会导致某些设备工作正常但是出现故障报警,或者需要屏蔽某个设备或区域的监测报警,可以通过手动关闭该区域的监测报警。该红外热成像系统提供了手动关闭某区域的报警的功能。
4 研究结果
针对建立的典型火灾模型场景,提出有效可靠的热故障判定算法,进行相应的模块软件设计,并实验验证在不同系统参数配置条件下热故障判定图像算法的效果,优化系统参数配置,提高红外热成像热故障判定的适用性和有效性。
4.1 被检测目标温升速率过快引起红外热像系统发出故障报警
被检测目标设备为温控红外黑体发射头,红外黑体与红外热成像系统的探测器距离为5 m,红外黑体的温度设置为从45 ℃上升至70 ℃,并将该系统的温升速率T1设置为10 ℃/s,实验结果见图6,在1 s内成功实现了预警和报警功能。图6界面中的黄色灯表示预警(warning),红色灯表示报警(alarming),绿色灯表示正常运行。每个状态灯下面的开关,表示可以将本区域的热故障判定功能屏蔽掉。

图6 温升速率过快导致的报警
4.2 被监测目标温度超过正常工作温度引起的报警功能的测试
实验主要监测温控红外黑体发射头,红外黑体与红外热成像系统的探测器距离为5 m。
1)将红外黑体的温度设置为从40 ℃上升至65 ℃,并将该系统的T2和T3分别设置为60 ℃和70 ℃。实验结果见图7,被监测目标温度达到T2值时,系统能在1 s内成功实现预警。
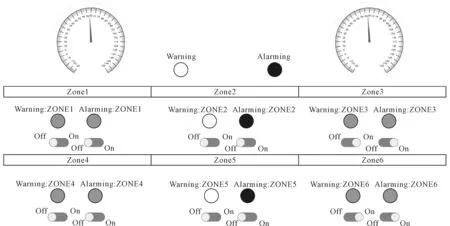
图7 被监测目标温度达到预警值实现预警
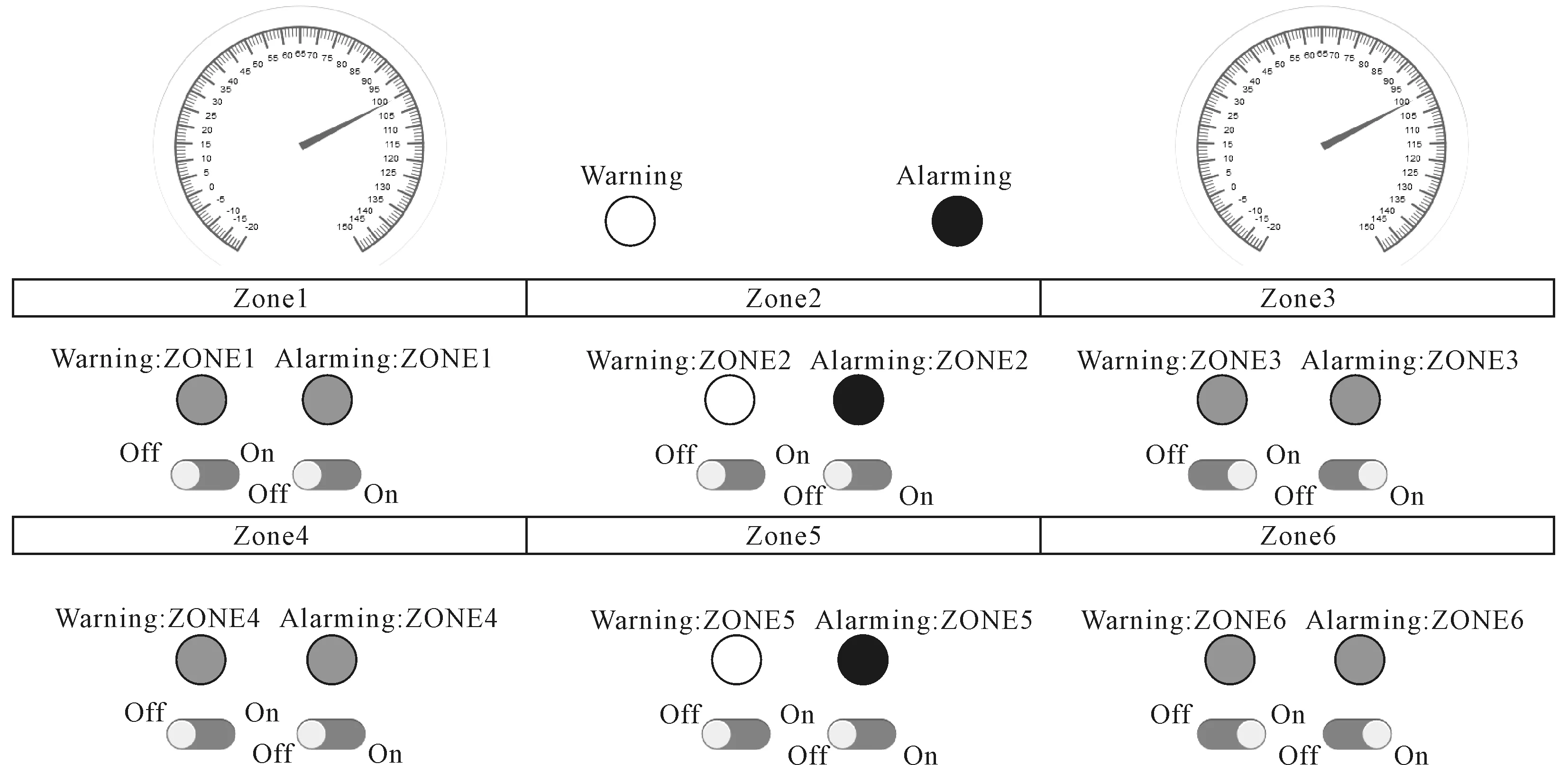
图8 被监测目标温度达到报警值实现报警
2)将红外黑体的温度设置为100 ℃,并将该系统的T2和T3分别设置为70 ℃和90 ℃。实验结果见图8,被监测目标温度达到了T2值时,系统能在1 s内成功实现报警。
4.3 多个被测目标同时报警的测试
实验用红外热成像系统监测5 m范围内的所有设备,将3个高温物体放于不同的区域,红外黑体放于监测范围的中间区域,处于区域2和区域5,其他2个高温物体分别放于区域3内和区域4内。
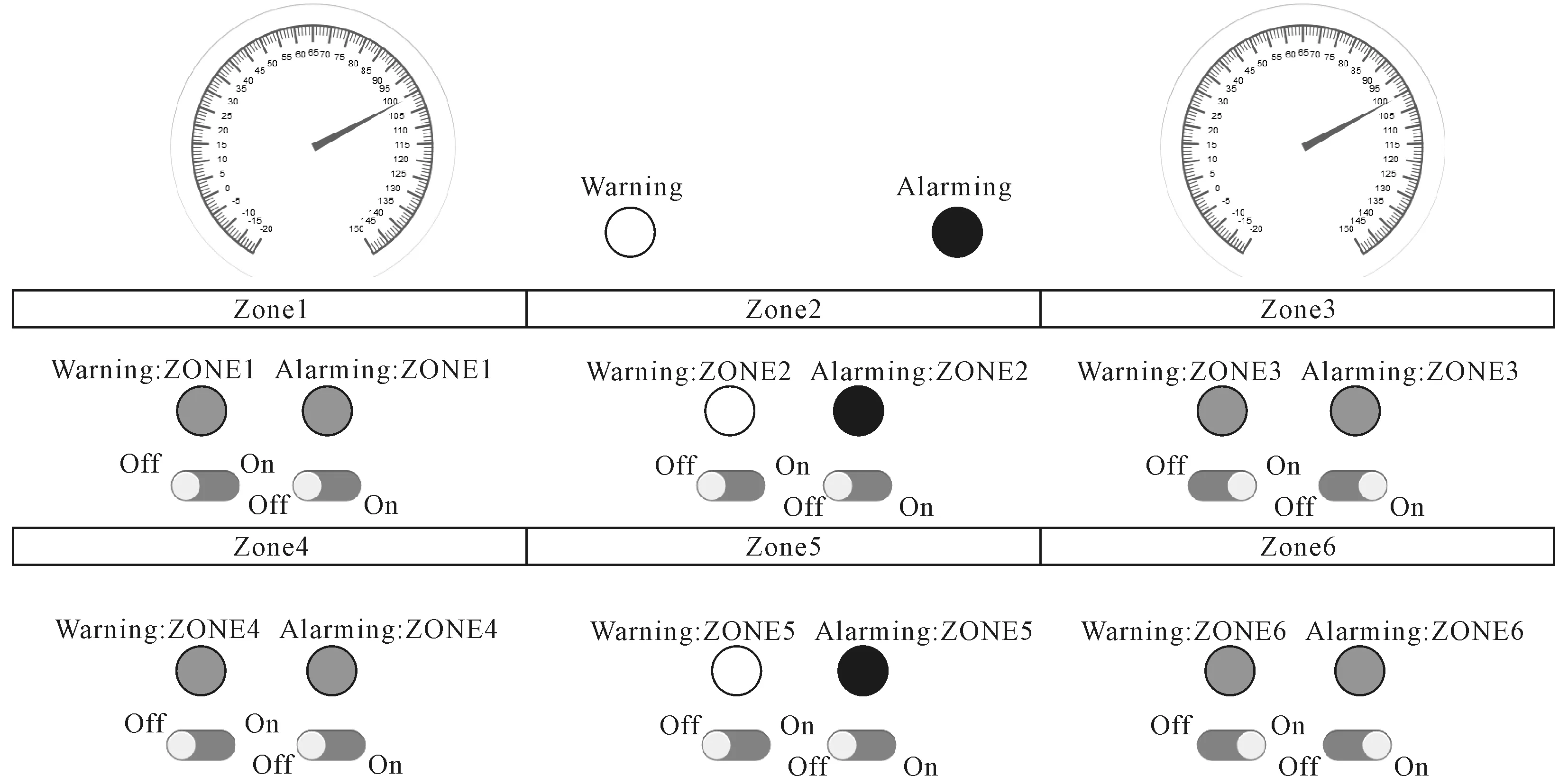
图9 多个被监测目标同时出现故障并报警
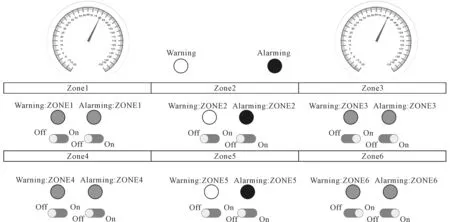
图10 被屏蔽的区域出现故障不报警
实验结果见图9,成功探测到3个高温物体,并且都在1 s内实现报警。根据报警信息和红外热图像,能够确定报警点的位置。
4.4 手动关闭报警的测试
实验是基于实验3场景下,验证手动关闭报警功能,希望屏蔽掉区域3、4、5的故障监测。实验结果见图10,成功屏蔽掉区域3、4、5的报警监测。
5 结论
文中分析了舰艇环境下典型设备热故障产生、发展和传播的特征;分析了热故障发展过程中红外热像的温度分布、形态变化,以及两者的关联;提取并建立可以准确快速表征热故障发生发展的特征模式,提出舰艇热故障的红外判定算法,对设备的工作温度进行实时监测。当设备的工作温度达到了某一设定温度值(预警值)或者工作温度上升过快时,红外热像系统会发出预警;当设备的工作温度偏离了正常温度范围时,红外热成像系统会发出警报。该算法的应用有利于值班人员及时采取措施来消除火情隐患和故障。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
防爆电机(2022年1期)2022-02-16
汽车电器(2020年11期)2020-11-27
知识就是力量(2018年8期)2018-08-16
文理导航·趣味课堂(2016年6期)2016-09-09
汽车维护与修理(2016年10期)2016-07-10
汽车维护与修理(2016年3期)2016-02-28
小学生·多元智能大王(2015年3期)2015-05-25
故事作文·高年级(2009年7期)2009-08-20