
继电器电路潜通路分析的一种方法
2019-01-07 07:14杨雪陈策郗琦
航天控制 2018年6期
杨 雪 陈 策 郗 琦
北京宇航系统工程研究所,北京100076
电路设计时,有时会需要通过继电器线包与继电器开关的串并联组合实现电路自保持功能,设计开关动作时往往考虑正向响应,当测试过程出现异常动作或状态时,电路状态会根据当前状态与开关动作改变,可能会出现与设计目标背离的状态,引入潜通路。而多数潜在通路仅在某种特定的条件下才会激发,故难以通过试验方式来甄别[1]。像20世纪60年代初期美国发射红石火箭,发射点火指令的控制插头比尾插头晚29ms脱落,造成潜在电路被激发,导致火箭刚起飞又误关机的严重后果。
目前潜通路分析方法主流的包括波音公司提出的采用网络树及专用线索表查找规范SCA(Sneak Circuit Analysis)方法,欧空局提出的路径线索查找的简化SCA方法,SoHAR公司的双向路径检索及设计缺陷分析方法[1-2],以及国内北京航天自动控制研究所研制的CANTGS/CSAS[3-5]、中国航空综合技术研究所与成都电子科大共同研制的UEST-611-301SCAS[3]、第二炮兵工程学院提出的定性仿真加功能推理[6-9],以及北京航空航天大学控制学院提出的基于图论的分析方法[10]。传统分析方法中将所有开关器件的状态不加限制地设置为导通或随机,会产生大量的无用路径。而对于路径搜索结果的处理,目前的方法是对全部的结果路径进行状态确认和分析,耗费大量的时间和人力,提高了分析成本。
根据继电器电路网络的电气特性,结合图论的理论设计分析模型,建立状态方程,确定电路不同初始状态下的各种响应及最终电路状态,依据最终稳态查找潜在通路,发现电路设计薄弱处,以便提高电路的安全性与可控性。
1 潜通路分析模型
用图论的理论建立分析模型,对一个继电器电路,隐去继电器电路网络的电气特性,简单地把电路抽象为一个图F(P,Q),P={p1,p2,p3,…,pn}表示图中的结点,对应电路图中的网络节点,Q={q1,q2,q3,…,qm}表示图中的边,对应电路图中的元器件或功能模块,如电阻、电容、灯管及用电设备等[10]。对继电器电路的潜通路分析中,一类代表功能器件、功能模块的边,当在某种继电器、开关组合状态下,实现了设计功能。另一类代表继电器、开关器件的边,继电器、开关处于接通、断开状态时,开关两端的电流通路存在多态性,因此,引入以变量形式衡量各器件的状态X={x1,x2,x3,…,xm}表示各支路的状态,值为0或1,各支路状态变量满足布尔代数运算法则


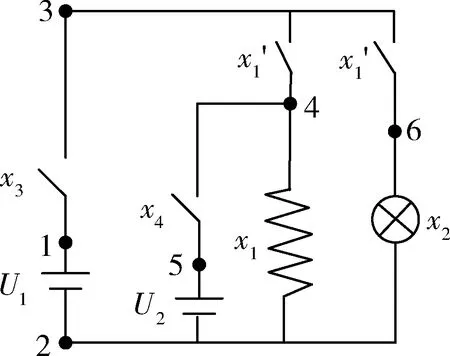
图1 简化电路
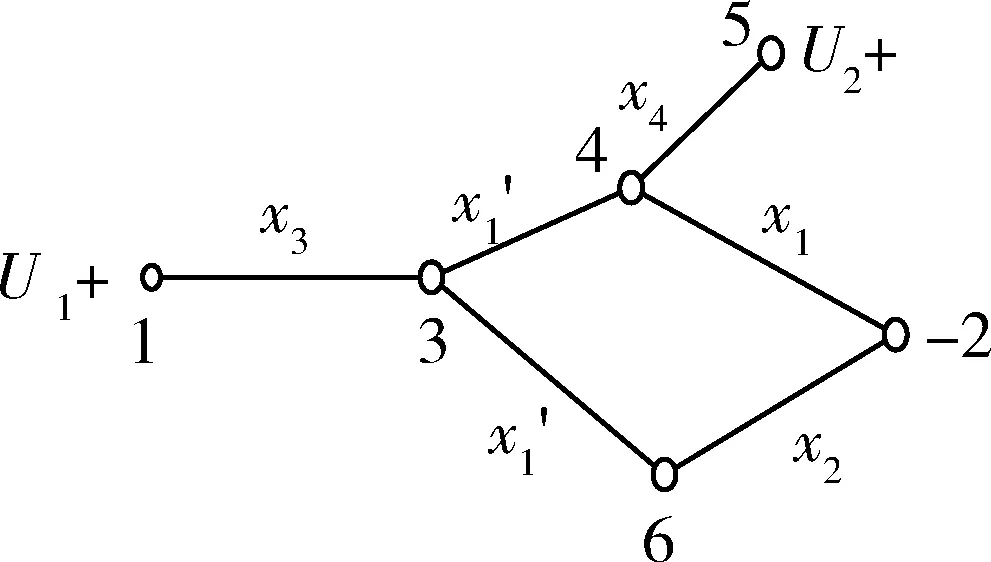
图2 分析模型
2 状态方程
潜通路分析中,可能出现的通路均为电源到地之间的通路,功能器件的状态由该支路的其他器件状态、动作决定,因此可以将功能器件的状态表示为其相关器件的状态及动作,即
对于多电源电路,实现某个功能的支路可能不只一条,将所有电源到地的相关支路均表示出来,可对该功能器件表示为
由于继电器电路的特殊性,其线包状态决定开关状态,而开关状态的切换会引起线包的供电支路改变,因此,针对这种特殊性,引入状态方程来表征电路的状态,将继电器线包、用电设备作为继电器开关状态、开关动作的函数,即
对于图2的分析模型,状态方程可表示为

3 潜通路分析方法
根据不同的当前各开关状态、继电器线包状态及开关动作可以确定电路最终的几种状态,如表1所示。

表1 不同起始状态对应的电路最终状态
电路保持稳定的最终状态为以下5种:

对这5种最终电路状态进行分析,状态1为不加电状态,状态2为控制电源给用电设备供电状态,状态3为准备上电状态,状态4为控制电、供电电同时供电状态,状态5为供电状态。其中状态1、3和5为设计目标,状态4为状态转换中出现的并联状态,状态2为不被允许的潜在状态,存在控制电源过载、损毁电源及异常断电损坏用电设备的风险。
4 结论
用状态方程确定继电器电路的最终状态,具有定性、全面且便于计算机辅助分析的特点。本文主要针对继电器电路进行分析,建立分析模型及状态方程,根据状态量及开关动作确定电路最终出现的状态,并由最终状态来确定是否存在潜通路。避免复杂系统由于设计分析不到、测试不到而留下的潜在威胁。对于复杂继电器电路,可以通过计算机辅助计算状态方程进行分析,以提高效率。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
煤气与热力(2021年6期)2021-07-28
北京航空航天大学学报(2017年1期)2017-11-24
中国医学装备(2016年6期)2016-12-01
电信科学(2016年9期)2016-06-15
电测与仪表(2016年13期)2016-04-11
燕山大学学报(2015年4期)2015-12-25
华东理工大学学报(自然科学版)(2015年3期)2015-11-07
电工技术学报(2014年7期)2014-11-15
