
广角度太阳光智能跟踪系统
2019-01-07 02:40刘明强龙海芳张正祥
现代机械 2018年6期
刘明强,刘 进,龙海芳,刘 迅,张正祥
(贵州省电子工业研究所,贵州贵阳550004)
0 引言
在能源与环境问题成为当今世界面临的两个重要挑战时,充分利用取之不尽,用之不竭的太阳能将成为人类必然的选择。目前太阳能利用,主要有太阳能直接利用(太阳能热水器)、将太阳能转变为电能(光热发电、光伏发电)等,要有效提高太阳能利用率,光跟踪系统必不可少。目前太阳光跟踪系统都需要根据安放点的经纬度等信息计算一年中的每一天的不同时刻太阳所在的角度,将一年中每个时刻的太阳位置存储到PLC、单片机或电脑软件中,都要靠计算该固定地点每一时刻的太阳位置以实现跟踪。且大多采用的是电脑数据理论,需要地区的经纬度数据和设定,一旦安装,就不便移动或装拆,每次移动完就必须重新计算参数、设定数据和调整各个参数;原理、电路、技术、设备都比较复杂的太阳光跟踪系统,非专业人士不能够随便操作。
1 感光元件
感光器件主要分为两类:1)光敏电阻;2)光敏电池。
光敏电阻,是利用半导体的光电效应制成的一种电阻,其阻值随入射光的强弱而改变,具有以下特点:光谱响应宽;测试光强范围宽,即可对强光响应,也可对弱光响应;无极性区分,使用方便,成本低,寿命长;灵敏度高,工作电流大,可达数毫安[2]。
光电池是一种直接把光能转换成电能的半导体器件。其特点是:光生电动势在光照为2000 lx时趋向饱和,即强光不敏感;作为测控元件使用时其特性随温度而变化,温度漂移较大,需采取温度补偿措施或保持温度恒定,设计相对复杂[3]。
2 硬件设计
系统硬件采用控制部分和光感采集部分分离设计,控制器部分主要由限位控制、手动调整、自动跟踪、开关控制量、传感器控制、供电部分、处理器和上行通信部分组成;光感采集部分由采集部分、通信供电部分和处理器部分组成。
控制器部分采用IP65设计,外部采用一个5芯防水航空接头与传感器连接,5芯信号分别为电源正、电源负、外壳接地、数据正、数据负;一个供电开关;两路(水平方位和仰角高度)手动调整开关; 两个防水接线孔。
光感采集部分采用IP66设计,外部使用一个5芯防水航空接头与控制器连接,5芯信号分别为电源正、电源负、外壳接地、数据正、数据负;其供电部分采用DC 5V供电,防止由控制器提供经导线(不同长短、大小)造成的供电不稳,内部2.5V~5.5V输入,输出5V的电源重生供电处理,其工作时间由控制器决定,如在夜晚将对其断电,次日日出前重新通电对日进行监测。其系统框图如图1。

图1 光感采集框图
2.1 广角度光感设计
感光器件选择。自然光照强度,黑夜为:0.00~0.02lx;月夜:0.02~0.3lx;阴天室内:5~50lx;阴天室外:50~500lx;晴天室内:100~1000lx;夏季中午太阳光下:30000~300000lx。根据使用环境要求,感光器件选用光敏电阻。
感光器结构:采用两个四象限区域,通光的直线传播,实现对太阳光广角度和精准跟踪。如图2、3, 当光线射入广角度光线感知范围时,由“五个位置-四象限”粗调结构实现广角度光线感知,如图3和4所示,将器件“粗上”和“粗上1”采用最大值法形成一个象限,参与器件“粗下”、“粗东”和“粗西”组成四象限结构。“粗上”和“粗下”组成垂直高度角粗调感应对比,实现向下75°,向上165°,即垂直高度角240°广范围感知;“粗东”和“粗西”组成水平方位角粗调感应对比,实现向东75°,向西75°,即水平方位角150°广范围感知。输出光强对比信号,由控制器处理并控制伺服机构,驱动装置进行姿态调整使其进入精调范围,粗调阶段完成。

图2 光感分布图(俯视) 图3 光线感知范围图(左视)
当光线直接射入(或经粗调后射入)精调光线感知范围时,粗调停止,进入精调阶段。如图3和4所示,由“四象限”精调结构实现光线精准感知,“精上”和“精下”组成垂直高度角精调感应对比,实现向下20°,向上20°,即垂直高度角40°范围内的精准感知;“精东”和“精西”组成水平方位角精调感应对比,实现向东20°,向西20°,即水平方位角40°范围精准感知。输出光强对比信号,由控制器处理并控制伺服机构,驱动装置进行姿态调整使其精准跟踪太阳。
2.2 控制部分设计
系统采用“可设时段+闭环系统”方式设计。可设时段,指在不同的地区春夏秋冬四季跟踪开始和停止的时段可以设置[6]。闭环系统,是指系统处于跟踪时段内,由感光部分采集当前跟踪位置信息→控制部分根据位置信息处理是否要姿态调整:①不调整→进入时间间隔(根据精度要求设定)→感光部分采集当前跟踪位置信息;②要调整→根据位置信息处理情况,驱动双轴传动装置进行一次水平方位和垂直高度姿态调整→感光部分采集当前跟踪位置信息[4-5]。其系统框图如图4。
限位设计。系统设计四路限位开关,分别是东、西和上、下限位,均采用常闭设计。通过光电隔离,采用微小信号控制大电流,高优先级硬件控制电机驱动使能。当外部限位装置没安装时,内部限位端口处于开路状态,所对应电机驱动是被禁止的。
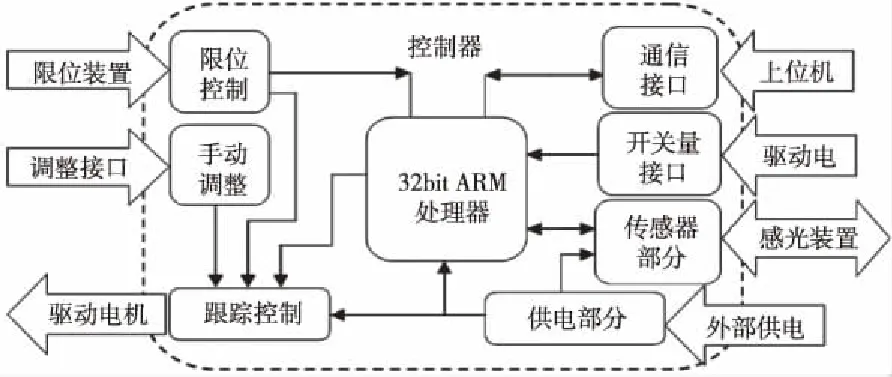
图4 系统框图

图5 H桥示意图
电机驱动部分。两路(水平和俯仰)H桥驱动直流电机,通过H桥的通、断组合状态来实现用两线控制直流电机的正反转,如图5,Q1、Q4,Q2、Q3都截止时,电机处于静止状态;当Q1、Q4截止,且Q2、Q3导通时,电机往一个方向转动;当Q2、Q3截止,且Q1、Q4导通时,电机往另一个方向转动。处理器通过基础的日期时间、传感器信号、限位状态和手动控制状态来控制H桥的通断组合,实现对两电机的驱动,完成对日跟踪。在这过程中一定要注意Q1、Q4、 Q2、Q3截止和导通的时序,严禁Q1和Q2或Q3和Q4同时导通的情况。
2.3 传动部分
选用双轴回转式减速器,有刷直流行星减速电机,回转式减速器精度≤0.08°,减速比580∶1,额定电压DC 24V,额定输出转速为0.048 rpm,1秒约转动0.228°,将其转动周期设为100 ms时,转动角度约0.02°,其最小调整分辨率约为0.02°,保证了伺服调整精度[1]。太阳每秒转过角度(360°+360°/365)/(24*60*60)=0.00418°。如要满足精度为0.1°时,在跟踪上的情况下约22 s必须调整姿态。
3 软件设计
软件设计包括:传感器固件;控制器固件;上位机软件。
3.1 传感器固件
传感器固件,其功能相对较少,主要功能有光信号采集和数据传输,采用无系统设计,对于数据采集使用DMA自动循环方式。具有结构紧凑、容量小、效率高、稳定等优点。
3.2 控制器固件
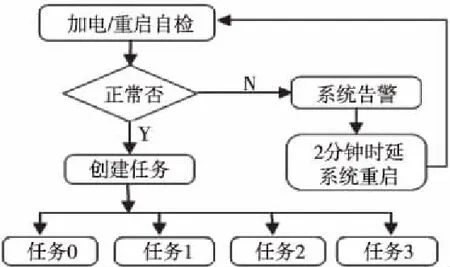
图6 流程图
控制器固件,其功能相对较多,主要功能为传感器信号采集、上位机通信、自动跟踪处理、手动跟踪处理、按键设置处理、显示处理和参数设置保存等,采用μC/OS II(是一个可以基于ROM运行的、可裁剪的、抢占式、实时多任务内核)系统平台进行设计。主要创建4个任务来实现本系统功能,见图6流程图。
任务0:主要执行上位机通信、接收传感器数据处理、主动向上位机上传信息控制和读取设置参数。
任务1:主要执行显示处理、参数设置、主动采集传感器数据控制和传感器数据数字滤波处理。
任务2:主要执行自动跟踪处理、 维护处理和异常天气接口处理。
任务3:主要执行各种运行标志设置/清零,时钟读取和看门狗处理。
3.3 上位机软件
上位机软件,采用基于.net架构的平台“Microsoft Visual Studio 2008”进行设计,主要功能包括跟踪系统各种参数读取和设置、远程监控、远程跟踪控制和通信日志记录。其主要功能介面分为三个:“常规显示”、“参数设置”和“通信日志”。
4 结论
经过实验数据、现场测试数据和修正,以及现场试运行验证,本系统能够对太阳实现实时跟踪,精度高,反应灵敏,快速定位,系统稳定,没有误动作。实现成本低,安装、调试简单,易于维护。主要在光热、以及光伏发电等太阳能应用领域,有较大市场,能显著提高太阳能的利用率。
猜你喜欢
好日子(2022年6期)2022-08-17
影像技术(2019年5期)2019-09-10
电子制作(2018年11期)2018-08-04
中国测试(2017年6期)2017-07-31
红领巾·成长(2017年5期)2017-07-05
女友(2016年3期)2016-09-13
网络空间安全(2016年3期)2016-06-15
CHIP新电脑(2016年3期)2016-03-10
中国信息化周报(2015年14期)2015-06-01
电脑爱好者(2015年7期)2015-04-09
