
上肢康复机器人结合常规康复训练对急性期脑卒中患者上肢功能的疗效研究
2019-01-07 02:11胡洁朱琳刘霖张艳明杜巨豹刘秀贞王伟宋为群
中国康复 2018年6期
胡洁,朱琳,刘霖,张艳明,杜巨豹,刘秀贞,王伟,宋为群
脑卒中的发病率、死亡率和致残率较高,居所有心脑血管死亡疾病的第二位。虽然很多卒中患者后期会恢复行走能力,但是仍然会遗留上肢的功能障碍。由于上肢以灵活性、协调性和技能性运动为主,上肢功能障碍的恢复常常滞后于下肢,这给回归家庭和社会带来极大不便[1]。卒中后康复的一个重要课题就是如何恢复上肢功能。近些年来,一个较有希望的手段就是上肢康复机器人。上肢康复机器人是一种新的有望增强传统康复能力的方法。机器人可以无疲劳地、精确地根据患者需求个体化地以持续的方式提供大量的、强化的训练。而且,机器人可以提供各种类型的感觉运动反馈,例如视觉和听觉反馈来易化运动学习[2-3]。本研究将上肢康复机器人与常规康复训练结合起来,目的在于观察机器人康复训练结合常规康复治疗对患者的上肢功能和日常生活能力的改善情况。
1 资料与方法
1.1 一般资料 选取首都医科大学宣武医院康复医学科2016年3月~2018年1月脑卒中后存在上肢功能障碍患者50例,均符合《中国脑血管病防治指南》的诊断标准。纳入标准:诊断单侧大脑半球脑卒中,病程1个月以内;无严重痉挛,改良Ashworth量表(Modified Ashworth Scale,MAS)评分<3分;无严重神经心理损伤,可以按指令进行操作[简易精神状态检查表(Minimum Mental State Examination,MMSE)评分≥22分];所有患者均签署了知情同意书。排除标准:还有其它部位病灶(例如脑干、小脑);有其它严重神经系统伴随疾病的,例如癫痫;患有严重心肺功能障碍等全身性疾病;未签署康复治疗知情同意书。将所有患者随机分成观察组和对照组,2组患者在性别、年龄、病程、病变性质以及卒中侧别方面均无统计学差异,见表1。

表1 2组患者一般资料比较
1.2 方法 对照组患者每天进行传统康复训练每次30min,2次/d、一周训练5d,总共4周。由治疗师进行训练,内容包括:患侧上肢良肢位的摆放、关节活动度的维持并扩大、利用牵张反射及快速牵拉刺激诱发肌肉主动收缩、诱导出现主动运动、Bobath握手训练、抗阻训练以及运动再学习训练等。观察组在进行传统康复训练的基础上,应用上肢康复机器人(ReFlex 100上肢康复系统)进行患侧上肢训练。对患者肩关节功能(包括屈曲、后伸、内收、外展功能)、肘关节功能(屈、伸功能)、前臂功能(旋前、旋后功能)进行强化训练。上肢康复机器人训练模式包括:被动运动;助动-单点触发运动;助动-多点触发运动;助动-连续触发运动;主动运动;抗阻运动模式;扰动运动模式。同时还可以根据患者情况选择不同游戏项目增加训练的趣味性。训练内容的选择上根据患者病情设定不同训练内容、训练难度等,循序渐进,开始由治疗师指导,逐步过渡到患者独立完成训练。观察组训练内容包括传统康复+上肢机器人训练,各为每次30min,1次/d、1周训练5d,总共4周。
1.3 评定标准 2组患者治疗前、后均进行以下评定。①简式Fugl-Meyer运动功能评定(上肢部分,FMA-UE):包括有无反射活动、屈肌共同运动、伸肌共同运动、伴共同运动的活动、脱离共同运动的活动、反射亢进、腕稳定性、肘伸直(肩前屈30°时)、手指协同能力与运动速度等10项,每一动作评分分值为0~2分,共计66分,分值越高表明患者肢体运动功能越好;②改良Barthel指数(MBI):包括修饰、洗澡、进食、如厕、穿衣、大便控制、小便控制、床椅转移、平地行走或以轮椅行进50m、上下楼梯,共计100分,分值越高表明患者日常生活活动能力越好;③肩关节前屈、后伸、水平内收、水平外展主动关节活动度的改善(关节活动度越大,表明患者肩关节活动改善越明显)评估疗效,由一名不知情的记录人对所有患者在治疗前后进行评分。

2 结果
治疗4周后,2组患者的FMA-UE、MBI和肩关节各方向主动关节活动度均有明显提高(均P<0.05),观察组的FMA-UE和肩关节前屈、水平内收、水平外展主动关节活动度提高程度更高于对照组(均P<0.05),2组患者的肩关节后伸、MBI改善程度差异无统计学意义。见表2~3。

组别nFMA-UE治疗前治疗后MBI治疗前治疗后观察组2514.80±3.0332.36±4.89ab27.60±12.0933.00±11.73a对照组2513.80±2.7524.44±3.45a25.00±11.4636.60±8.87a
与治疗前比较,aP<0.05;与对照组比较,bP<0.05

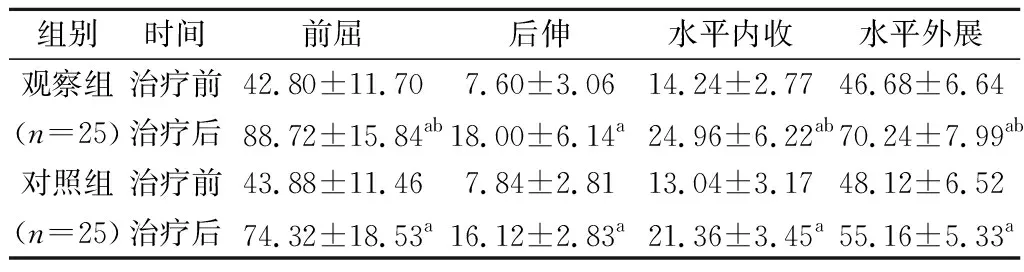
组别时间前屈后伸水平内收水平外展观察组治疗前42.80±11.707.60±3.0614.24±2.7746.68±6.64(n=25)治疗后88.72±15.84ab18.00±6.14a24.96±6.22ab70.24±7.99ab对照组治疗前43.88±11.467.84±2.8113.04±3.1748.12±6.52(n=25)治疗后74.32±18.53a16.12±2.83a21.36±3.45a55.16±5.33a
与治疗前比较,aP<0.05;与对照组比较,bP<0.05
3 讨论
在本研究中,我们发现传统康复治疗对改善急性期脑卒中患者偏瘫上肢功能及肩关节主动关节活动度有明显疗效,而结合上肢康复机器人训练的患者在上肢功能活动的数量和质量上都有改善都更加明显,上肢的大量重复练习可以帮助患者打破异常模式,获得较好的运动功能。上肢康复机器人辅助训练将运动学习的关键要素合并到了治疗当中[4],包括高强度的、任务特异性的、可重复的和交互性的练习,而且趣味性更强,患者参与康复训练的积极主动性提高,治疗可提高临床疗效,使康复机器人更好地为康复患者服务。
多项研究证据和系统评价支持上肢机器人在改善脑卒中患者运动和功能方面的效果[5-8]。有研究证实[9-10],机器人辅助的训练次数从2500~3600次不等,经过大量重复累积效应,可以有效地促进大脑的可塑性以及功能重组,从而提高偏瘫侧上肢的运动功能。
康复机器人具有不同的康复训练模式,可以适应不同患者以及患者在不同恢复阶段的不同情况。患者主动发起的模式考虑到了患者的意图和主动参与的能力,较被动模式更有效。许多的证据证明这种患者-机器人互动的模式对促进患者的恢复非常有效。机器人可以感受到患者的状态并且根据患者的不同状态进行顺应性的匹配,同时,“按需辅助”的理念在机器人辅助康复中也得到较好的贯彻,机器人只为患者提供必需的辅助以便鼓励患者得到最大程度的参与[11]。
本研究治疗后观察组患者肩关节的前屈、水平内收、水平外展主动关节活动度较对照组改善明显,而肩关节后伸主动关节活动度较对照组没有更大的改善,其原因可能是与上肢康复机器人的训练任务中需要肩关节后伸的任务较少,而且手臂支架的设计可能会限制患者肩关节的后伸,所以这就提示我们需要进一步加强针对肩关节后伸的训练,改善患者肩关节活动范围,提高其肩关节控制能力,或者在任务的设计中增加训练肩关节后伸的任务。
我们的研究结果也显示,上肢康复机器人训练结合传统康复与对照组相比并没有更大程度地改善患者的日常生活能力,这与以前的一些研究不一致[12-13],这可能与很多因素有关,比如实验的设计,病人的选择,功能的严重程度、样本量、治疗的强度等等。有研究认为[4],机器人辅助治疗本身不足以改善日常功能或者在真实环境中使用患肢,上肢康复机器人训练主要是患者借助上臂和前臂的协调完成整个操作任务,而腕和手在完成日常对物体的操控中起着非常重要的作用,所以需要结合补充的功能训练使患者学习特定的运动技巧,例如手的灵敏性、协调性和其他日常生活中需要的复杂功能,与其他技能的结合可以帮助完成复杂的日常生活需求。
缺乏合适的日常生活能力评价量表可能是日常生活能力改善不明显的另一个原因。目前的评价方法都比较主观,而且不能敏感的反映患者功能的改善,而间接的方法和患者报告的形式又限制了研究者获取患者在生活中实际如何运用功能的能力[14-16]。另外,卒中患者经常使用健侧代偿来完成日常任务,从而不使用患侧。上述原因可能会使研究者错误的解释研究数据因此低估上肢康复机器人康复技术对日常生活能力的改善。
除了可能的混杂因素以外,测量方法的主观性、缺乏患者完成日常生活任务的实际背景也会阻碍患者日常生活能力的改善。动物研究和现代康复研究都证实环境是运动学习的重要因素。而且,由于可能有潜在的认知功能的损伤,卒中患者通常在把学习到的运动技巧转化运用到日常生活中都存在困难。
目前尚无研究探索最适宜的运动强度,未来的研究应当探索最适宜的训练强度并同时记录有无副作用产生。还有患者上肢机器人结合肢体训练改善机制到底是什么?对哪些部位损伤的偏瘫患者更有意义,还有远期效果如何都需要进一步随访。未来的研究可能需要结合不同类型的有循证医学证据的康复手段例如功能性电刺激进行进一步研究。许多因素会影响康复效果,但是关于上肢机器人的治疗中哪些因素会影响康复治疗还知之甚少。研究这些因素可以帮助“量体裁衣”,选择最适合患者的治疗计划和更精确地对患者进行分层,使患者在进行康复机器人治疗后获得更好的效果。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
中华养生保健(2022年10期)2022-05-23
昆明医科大学学报(2022年2期)2022-03-29
现代临床医学(2021年5期)2021-11-02
广西医科大学学报(2021年4期)2021-05-25
中华养生保健(2021年18期)2021-02-13
中华肩肘外科电子杂志(2020年1期)2020-08-24
新传奇(2019年40期)2019-11-01
学习与科普(2019年6期)2019-09-10
中华肩肘外科电子杂志(2019年4期)2019-08-24
