
基于内阻法修正的蓄电池卡尔曼滤波SOC估算
2019-01-07 12:05:04,,
计算机测量与控制 2018年12期
,,
(陆军工程大学石家庄校区 车辆与电气工程系,石家庄 050000)
0 引言
卡尔曼滤波算法自身能不断修正蓄电池荷电状态的偏差,具有较高的估算精度,并且算法构建简单,在SOC估算中得到广泛应用,但是初始SOC误差较大会影响前期收敛性。如果当实际过程噪声和测量噪声大于设定噪声时,较大偏差的SOC初值还能引起滤波发散。针对上述问题,文献[1]提出Hermit插值函数的方法,通过直接建立开路电压与SOC模型,使电压值均匀分布在插值函数附近,用插值电压估计值的SOC替换相应的卡尔曼滤波关系曲线中SOC,该方法在于融合卡尔曼滤波和开路电压法,但忽略开路电压法耗时较长的问题;文献[2]提出开路电压与SOC模型的拟合函数预测初始SOC值,预测方法虽能避免开路电压法的测量时长问题,但是忽略电压充放电初期参数变化较大导致初始值预期精确度较差的问题。文献[3]中说明了SOC初始值由开路电压法估算不准确的原因在于电池具有自恢复效应,需要静置较长时间才能消除该效应的影响,得到准确度较高的SOC估计值,通过卡尔曼滤波方法能修正不准确带来的误差,该方法只说明卡尔曼滤波算法在整个充放电过程对不准确性带来的误差的修正,并没有考虑在短期内这种误差对卡尔曼滤波算法估算的影响。
基于上述参考文献分析,本文通过对实验所得数据分析,对电压、电流和内阻关键参数与SOC关联度进行比较,实现对关键信息重要度筛选,用关联度最高的内阻法修正的初始SOC作为卡尔曼滤波起始值,并将关联度较低的电压法估计的初始SOC也作为卡尔曼滤波估计起始值,通过对比分析验证不同方法对扩展卡尔曼滤波算法的整体估算精度的影响。
1 基于灰色关联模型的内阻关联度验证
灰色关联分析是一种多因素统计分析方法,按照因素间强弱和大小确定因素和整体的关系。该方法基于各因素的时间序列,如果各因素时间序列的几何形状越接近,其对应的关联程度越高。目前,该模型广泛用于工程技术、农业、环境和经济等领域的各种不同系统中,用于系统分析、评估、建模、预测和设备故障诊断和识别。其中在蓄电池参数分析领域,文献[4]将灰色关联分析模型用于内阻、电流和电压的SOC关联程度的研究,将研究结果作为一项重要理论依据支撑其后续的内阻随着电流、温度等参数变化的性能分析。本文也采用灰色关联模型用于内阻与电压对SOC关联程度的研究。
1.1 灰色关联模型建立
标准灰色关联模型构建步骤如下所示。首先选取分析数据,组成个数列。
(1)
其中:n是时间序列取样点的个数。然后选定参考数据列x0,记作:
x0=(x0,x1,…,xm)
(2)
将选定矩阵与参考矩阵相除,得到:
(3)
(4)
然后依次计算每个被评价对象指标序列与参考序列对应元素的绝对差值:
Δi(k)=|x'0(k)-x'i(k)|,i=0,1,…,m;k=1,2,…,n
(5)
计算出最大绝对差值与最小绝对差值:
(6)
(7)
计算关联系数:
(8)
最后计算关联度:
(9)
1.2 基于灰色关联模型的蓄电池参数分析
蓄电池基本参数有电压、电流和内阻。本文采用艾德克斯(ITECH)IT-B1004充放电测试系统对6-QW-120b蓄电池进行放电测试,使用BT3563电池测试仪对电压、内阻参数测量。其中放电电流I=30 A,当电压低于最低工作电压时停止放电,部分测试数据如表1所示。
结合表1数据,用灰色关联模型分析筛选与SOC的稳定性和关联度最高的参数。其中SOC、电阻、电压和电流组成4个数列,即m=4。将0~50 min的30组数据作为采样点数,即n=30。把SOC随时间变化的序列作为选定参考数据x0,x0=(100,96.72,93.44,90.16,86.89,83.61,81.97,78.69,75.41,72.13,68.85,65.57,62.30,59.02,55.74,52.46,49.18,40.98,32.79,24.59)
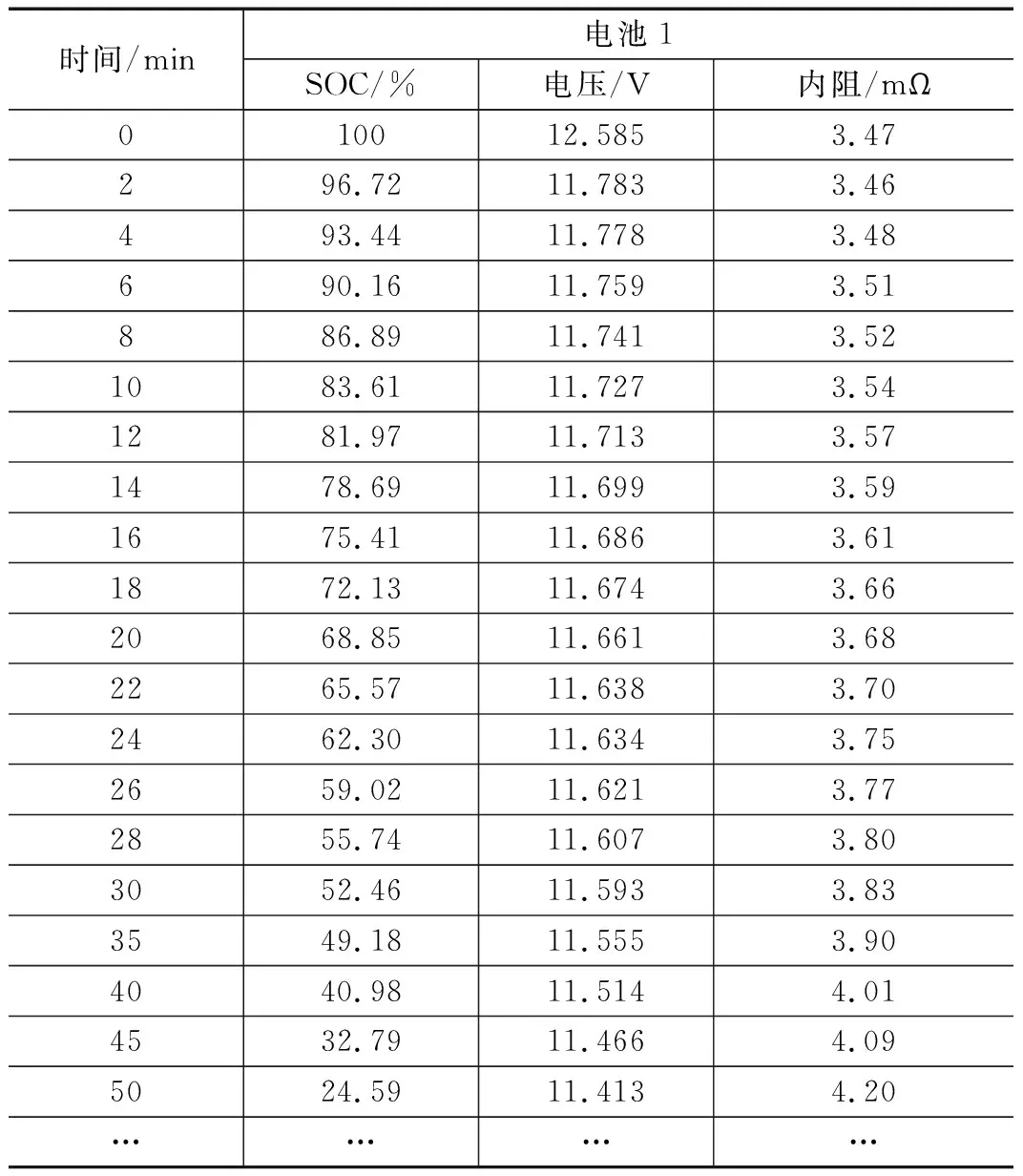
表1 电池放电部分数据
再将电阻、电流和电压随时间变化序列分别作为x1、x2、x3,分别为:
x1=(3.47,3.46,3.48,3.51,3.52,3.54,3.57,3.59,3.61,3.66,3.68,3.70,3.75,3.77,3.80,3.83,3.90,4.01,4.09,4.20);x2=(30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30,30);
x3=(12.585,11.783,11.778,11.759,11.741,11.727,11.713,11.699,11.686,11.674,11.661,11.638,11.634,11.621,11.607,11.593,11.555,11.514,11.466,11.413);
其中ρ为分辨系数,由人为设定,通常情况取0.5。最后得到r为灰色关联计算值,r越大,其对应参数序列与SOC相关度值越高,变化规律更符合SOC变化曲线。
同理,为了验证放电初期各参数与SOC变化序列,将0-4分钟的3组数据作为采样点数,即n=3。
x1=(3.47,3.46,3.48);
x2=(30,30,30)
x3=(12.585,11.783,11.778)
SOC、电阻、电压和电流组成4个数列,即m=4,ρ仍取0.5,代入灰色关联模型得到各参数与SOC初期相关度值。为了直观表示各参数序列相关度值的变化趋势,不同计算结果由图1表示。

图1 放电初期和完整放电相关度曲线
由图1可知,完整数据下,电阻序列相关度值0.6734,电压相关度值0.6550,而电流相关度值0.6508,电流序列参数恒定,为0.68 A。电阻和电压序列都相关度值都大于恒定参数电流序列,数据说明电压与内阻可以作为荷电状态估计的主要参考依据;在前三组数据下,电阻序列相关度值0.5659,电压相关度值0.5409,而电流相关度值0.5556,电压参数序列相关度值低于恒定电流参数,说明放电初期电压相较于电阻存在剧烈变化,且变化趋势与SOC不一致。综上所述,内阻更适合作为初期电池荷电状态的主要参考因数,而电压作为次要参考因数,为后文的内阻法修正初始SOC估计方法奠定基础。
2 电池卡尔曼滤波模型及参数确定
2.1 电池模型建立
基于卡尔曼滤波SOC估计需要建立电池等效电路模型,目前常用的电池模型包括Rint模型、Thevenin模型、PNGV模型以及Randles模型,其中这4种等效电路模型中,Rint模型结构最简单,复杂度最低,而Randles模型结构复杂,但具有较高精度,而其余两种等效代电路模型复杂度适中,精度也适中。因此本文采用二阶RC的Randles等效电路模型,它具有结构简单,物理意义清晰和较好的静动态特性的优点,其中模型的等效电路如图2所示。
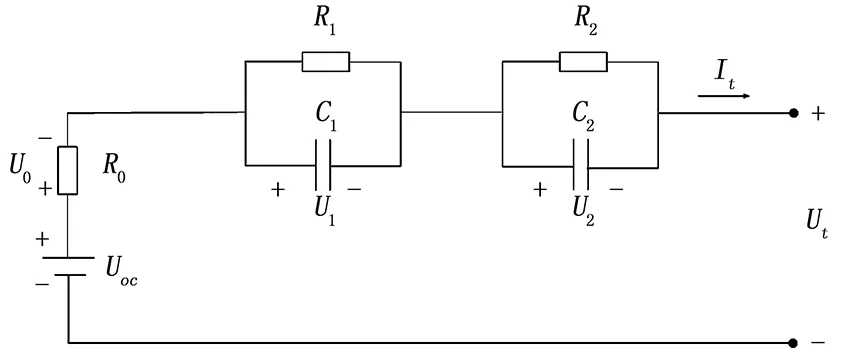
图2 电池二阶等效电路模型
其中:R0为欧姆内阻,R1、R2、C1、C2分别为电池极化内阻和极化电容,Uoc为开路电压,Ut为端电压,It为端电流。
基于等效电路模型可以得到如下数学关系式:
(10)
由上述关系式可知R1、R2、C1、C2可以用来模拟电池极化的动态特性,端电压和电流的关系可以反映电池充放电具体进行过程。
而针对电池SOC的估算,可以通过安时积分法得到:
(11)
其中:Q为电池标定容量,η为库伦系数,用安时法对t0到t时刻电池电流It积分,然后用库伦系数η修正,与初始状态SOC相加即可得到此时的SOC估计值。因为是积分过程,可知初始状态SOC的准确估计对后续SOC估计具有重要影响。
根据上文电池等效电路模型的数学推导,可以实现电池的状态空间模型的建立:
(12)
其中:τ1=R1C1;τ2=R2C2;状态变量xk=[S(k)u1(k)u2(k)];控制变量uk=It(k);观测变量yk=ut(k);系统噪声wk=[w1(k)w2(k)w3(k)];协方差为Q;观测噪声vk;协方差为R。
2.2 模型参数确定及初始SOC预测
本文选用风帆公司型号为6-Q-120b的蓄电池进行实验,实验温度22°,先将蓄电池充满电后静置1 h,前30 min每隔2 min测量并记录电池端电压和内阻,后面每5 min记录一次。具体数据如表1所示,其中需要辨识的参数包括欧姆内阻R0,极化内阻R1、R2,极化电容C1、C2,电压-SOC曲线,电阻-SOC曲线。
欧姆内阻R0由BT3563测得,实验测得值如下,然后取其平均值,值为3.707 mΩ。

图3 欧姆内阻辨识曲线
由Ut=Uoc-Ite-T/τ1-Ite-T/τ2R0,代入表1数据及R0值,通过origin软件拟合曲线功能可得:R1为0.616,C1为0.4733,R2为0.3517,C2为0.8308,上述模型拟合值能很好拟合已做实验数据。又将实验测得离散数据拟合成电压-SOC曲线,电阻-SOC曲线如图4所示。
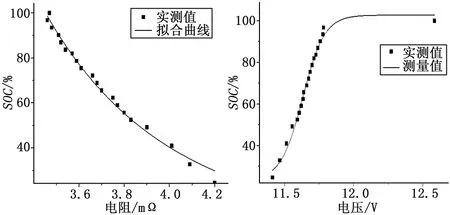
图4 电阻-SOC曲线和电压-SOC拟合曲线
可见电阻-SOC曲线拟合很好,电压-SOC曲线在部分点有较好拟合,在放电初期,电阻-SOC曲线精度相较于电压-SOC曲线高,即测量任意点电阻值,都有对应的SOC估计值,而电压值对应的SOC误差较大。电压对应SOC估计误差较大,这是由于放电初期电池具有自恢复过程,而电阻对应SOC估计误差较小,因为这个自恢复过程对电阻的影响因数较小,因此电阻参数对应的SOC相关性更好,因此采用内阻法对SOC初始值估算具有较好可行性。
2.3 基于扩展卡尔曼滤波算法SOC估算
扩展卡尔曼滤波采用最小误差思想,对于非线性系统滤波,将非线性系统转化为近似的线性滤波。该方法的优点是克服传感器精度不足的问题和修正SOC初始值。在扩展卡尔曼滤波动态观测模型中,电池充放电电流为系统输入量,电池电压为系统输出量,电池SOC为状态变量。通过算法对每一个采样点的电池性能进行采集,然后分析采集信息得到此时状态变量,并结合上一时刻状态变量得到输出状态变量和输出量的更新。可知卡尔曼滤波在动态估算中这种结合上一时刻的方式能很好预估-校正,因此具有很强的修正能力,能较好解决安时积分法带来的电池测量误差积累影响SOC估算结果的问题,也对SOC初值结果不精确带来的估算误差有一定修正。
扩展卡尔曼滤波状态方程:
x(k)=Ax(k-1)+Bu(k-1)+w(k-1)
(13)
z(k)=Cx(k)+v(k)
(14)

状态递推后协方差矩阵:
P(k)*=AP(k-1)AT+Q(k-1)
(15)
扩展卡尔曼滤波增益:
K(k)=P(k)*C(k)T(C(k)P(k)*C(k)T+R(k))-1
(16)
扩展卡尔曼滤波修正状态向量和协方差矩阵:
x(k)=x(k)*+K(k)(z(k)-Cx(k)*)
(17)
P(k)=(I-K(k)C(k))P(k)*
(18)
其中:R(k)为观测噪声协方差矩阵,I为单位矩阵,P(k)为状态变量x的上一时刻和这一时刻的协方差。K(k)为权重值,代表电压测量值在SOC修正过程中的比值,当初始值与状态变量误差较大时,K(k)权重较大,它的准确性直接影响收敛精度,这需要一个准确的初始预测值。
3 结果验证和仿真分析
本文通过单体电池放电静置一段时间充电,来验证估计结果正确性。实验数据通过充放电测试平台,首先将蓄电池充满电,然后恒流放电,放电至终止电压。在静置一段时间后,又恒流充电。其中初始放电时SOC估计如下表2和表3所示,为了使结果更精确,将初始电压估计SOC方法中10 min静置所应的SOC估算值设定为标准值,同理,将初始电阻对应SOC方法中10 min静置所对应SOC估算值设定为标准值。
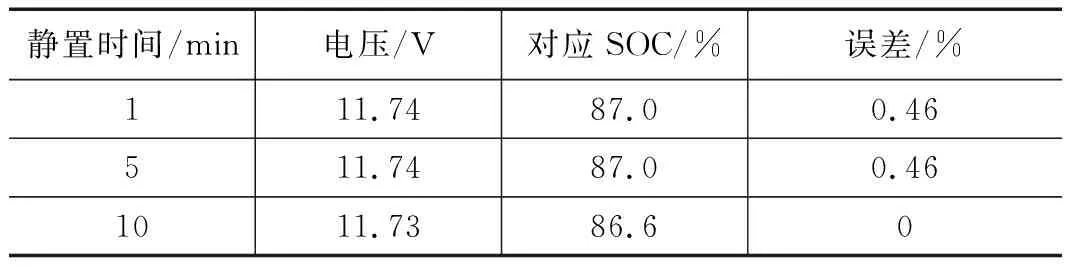
表2 初始电压与SOC估计误差
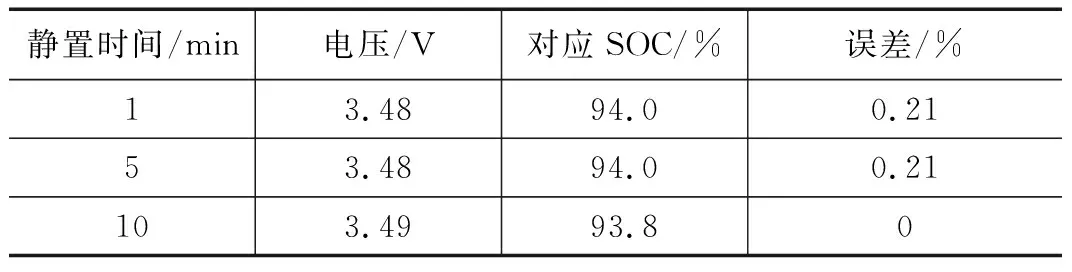
表3 初始电阻与SOC估计误差
由上述关系可知,对于开路电压法估计SOC需要静置较长才能获得较为准确的初始SOC值,不然会产生较大的估计误差,而电阻在较短的静置时间内,SOC的估算误差较少,这不仅与估算过程中静置手段有关系,还与相应参数对SOC的内部相关性有关,说明相关性较高参数能获得更为准确的估算结果。
然后将初始估计的SOC代入扩展卡尔曼滤波算法,利用仿真搭建的模型进行验证,对实测值和仿真值对比分析,如图5所示。其中参考曲线为默认为充满电后初始SOC值为100,而将静置5 min中的初始电压估计SOC和初始电阻估计SOC分别代入算法,可知初始电阻对应SOC值94更接近满电状态的SOC值100。然后进行扩展卡尔曼滤波SOC估计实验,结果如图5所示。
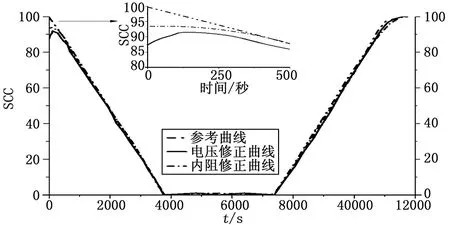
图5 不同修正方式的扩展卡尔曼滤波曲线
从图5中可知,在估计初始阶段,内阻修正的曲线比电压修正曲线更接近参考SOC曲线,有更好的收敛性,提高了整体估算精度,验证了灰色关联法中内阻比电压有更高的相关性。而随着仿真的进行,扩展卡尔曼滤波算法对初始误差的修正作用有很好显现,能较好估计SOC的变化,修正测量过程中的估算误差。但是针对短期内,比如初始值估算误差附近的SOC估算,即图5中0~500 s范围内的估算,内阻修正法的SOC估算有更好的精度和收敛性。
4 结论
本文基于灰色关联度法分析电阻和电压参数的相关性,通过具体扩展卡尔曼滤波算法验证电阻和电压两种序列参数初始SOC估计值对扩展卡尔曼滤波的影响,通过SOC输出曲线可知两种方法都能很好跟踪SOC的变化,其中内阻修正曲线在初始阶段有更高的收敛性,更接近参考SOC变化曲线,不仅加快了估算速度,还能提高整体的估算精度,有助于改善初始值偏差导致SOC估算误差的问题。具体而言,通过本文可得:
1)结合充放电实验数据,采用灰色关联法分析得到数据,可知在本次实验中,内阻相较于电压,与SOC有更高的关联度。
2)在内阻与SOC具有更高关联度的基础上,通过初始状态下静置不同时间来验证实验数据中内阻和电压两种参数对初始SOC估算准确度,可知电压的测量受到电池自恢复过程影响较大,估计的SOC误差大。但在相同静置时间基础上,内阻法估计较电压法更接近初始SOC值,说明电压法在充放电初期变化幅度更大,较不稳定。
3)基于内阻法修正和开路电压法两种扩展卡尔曼滤波的SOC估计可知,在整个估计过程中,两种方法具有相似结果,充分说明卡尔曼滤波对测量过程中误差的修正作用,但在0~500 s的估算过程中,内阻法具有更高的估算精度和收敛性。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
法律方法(2019年4期)2019-11-16 01:07:28
TMR Modern Herbal Medicine(2019年4期)2019-11-01 03:01:24
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
中学物理·高中(2016年12期)2017-04-22 16:36:46
中学物理·高中(2016年2期)2016-05-26 04:45:44
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2016年9期)2016-02-27 09:05:34
