
模糊PID在地铁焓值控制中的应用
2019-01-03 05:35:56河南辉煌城轨科技有限公司郭丹洋苗建科
电子世界 2018年24期
河南辉煌城轨科技有限公司 赵 阳 孟 科 郭丹洋 周 非 苗建科
焓值控制是地铁系统中用于环境控制的一种重要方式。通过对焓值的控制实现地铁站内部温度与湿度的均衡,使乘客感觉舒适。传统的焓值控制主要通过PID方式进行,在列车进出站、出行高峰期等扰动存在的情况下控制效果差,本文尝试在PID中加入模糊环节,以优化PID的控制效果。
1.背景
随着社会发展,人们生活水平的提高,城镇化水平加剧,城市人口数量日益增多,多数家庭都使用小轿车作为代步工具,然而城市交通却面临了巨大的压力。城市拥堵、停车困难等问题日益凸显,再加上环境气候问题的严峻形势,各地政府均在呼吁市民多乘坐公共交通工具出行,减少小轿车使用量。
地铁是一种运行于地下的轨道交通工具,具有运载量大、不占用地表空间、安全稳定、速度快等优点,越来越受到国内大型城市市民的青睐。地铁站多数为地下站,车站空气环境对乘客的乘坐舒适度甚至生命安全有着举足轻重的影响,如何让乘客有一个舒适安全的乘车环境成为一个必须解决的问题。
地铁环境控制系统,通常使用焓值的高低来作为衡量地铁站环境的指标,传统的焓值控制使用PID,但是PID控制对控制模型要求高,不精确地控制模型难以得到好的控制效果。但是地铁站环境复杂,建立经确模型困难,加之地铁站内扰动源较多,因此需要一种可靠的不依赖精确数学模型且鲁棒性强的控制方式来实现焓值的控制。
2.焓值控制
焓是热力学中表征物质系统能量的一个状态参量,空气中的焓值是指空气所含有的绝对热量,空气中的焓值是由干空气的焓值和水蒸气的焓值组成,干空气的焓值与干球温度有关系,水蒸气的焓值与空气中的含湿量和干球温度有关系。而含湿量为每千克干空气所含有的水蒸汽的质量。
焓值计算公式:

i——表示空气焓值,单位KJ/Kg干空气
d——空气含湿量,单位g/Kg干空气
t——空气干球温度,单位℃
焓值控制是指环境控制系统根据焓值变化对执行机构下发命令的控制方式。实际焓值通过现场温度传感器和湿度传感器采集,根据公式计算得到实际焓值。通过实际焓值和设计焓值的计算得到焓差,根据焓差判断执行器件(空调机组、蒸发冷凝设备)将要执行的动作。目前,使用最多的焓值控制是使用PID控制。其流程图如图1所示。

图1

图2
模糊算法是通过模糊控制规则实现的一种智能算法,该算法的特点是鲁棒性强、对模型依赖小,对PID算法加入模糊控制规则后能明显改善控制性能。模糊PID控制方式如图2所示。
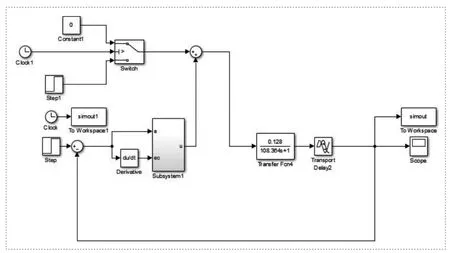
图3
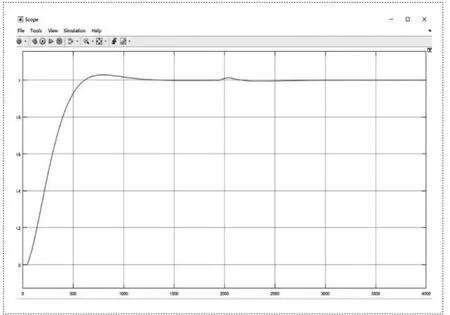
图4
3.系统建模与仿真
系统建模分为物理模型和数学模型,本文用于系统分析因此要建立数学模型。数学建模又分为激励建模和实验建模,参照西安建筑科技大学硕士研究生张夏的毕业论文《变新风的最小焓差控制》一文中实验数据,本系统传递函数采用公式2:

使用Matlab为系统建立仿真模型,使用模糊控制设计模糊控制器,模糊控制器包含e和ec的隶属度函数、根据经验设计参数的偏差控制规则表、以及最终根据控制规则表编写模糊规则,并输出到工作空间,具体过程不在一一赘述。
使用Simulink做模糊自适应PID仿真,如图3所示。
图3中控制器使用模糊PID控制器,传递函数使用公式2中的分数,延时部分参数设置44,在1900s时加入的扰动,扰动大小为0.2,扰动存在时间为100s,最终仿真效果如图4所示。
从图4中可以看到在模糊控制器作用下系统响应较快,控制曲线超调小于20%,出现扰动后能很快回到稳定点。
结论
由于模糊控制不需要建立精确的被控对象模型且抗干扰能力强,因此更适合像地铁站这种影响因素多,精确模型难以建立而且干扰源多的情况使用,由仿真的结果看,系统能迅速达到设定点,少许超调后迅速回到设定点并稳定,出现扰动后有所反应,扰动消失后快速稳定,可见控制效果较好。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
安徽农业科学(2021年18期)2021-09-27 17:28:56
今日自动化(2021年11期)2021-01-12 01:06:54
数学物理学报(2019年4期)2019-10-10 02:38:56
山东农业科学(2019年12期)2019-02-10 11:00:23
河北工业科技(2018年2期)2018-09-10 20:41:04
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
