
基于MR-6的批量胚胎细胞运动的自动追踪算法
2018-12-29 02:17:00尹昕,陈宸
天津师范大学学报(自然科学版) 2018年6期
尹 昕,陈 宸
(天津师范大学电子与通信工程学院,天津300387)
生物体的疾病是细胞病变和细胞失去程序性调控的综合反应[1].在胚胎的发育过程中,细胞在特定化学物质的诱导下定向运动,如果未能正确控制细胞的运动,将导致发育成的生物体产生严重的疾病或缺陷.追踪胚胎细胞的运动轨迹,研究其运动特性,进而检测其趋化特征,进行运动模式的预测和控制,将有助于医学研究人员治疗具有高度扩散性的疾病以及进行有针对性的药理学研究.因此,对于胚胎细胞运动过程的实时追踪和分析已成为当前国际上生命科学研究的一个热点,众多学者在此方面进行了探索.文献[2-4]通过显微图像采集系统自动捕获鸡胚胎细胞显微图像,采用显微镜的形态观察方法观察鸡胚胎细胞的运动过程和细胞簇的运动趋势,其中多个感兴趣追踪区域间的切换由手动完成,这种追踪方式需要多个有实际相关知识和经验的操作者交替工作,如果细胞的运动变化发生在操作者交替的过程中,则相关的变化信息就无法捕捉到,因而无法实现长期的实时追踪.文献[5]采用基于Boyden Chamber的方法进行细胞运动特性的自动检测,该方法利用染色,人工统计细胞数目来评估细胞的迁移,但无法得到动态同步监控细胞的显微图像.文献[6]通过建立细胞集落划痕的方法间接评估个体细胞的运动特性,这种方法虽然操作简单,但无法适用于胚胎细胞整体运动趋势的追踪研究.
综合生物研究者的关注点和胚胎细胞自身的特点,一个比较完善的胚胎细胞追踪与分析系统应具备如下功能:首先,考虑到胚胎细胞的生理特点及其定向运动的特征,在追踪细胞簇整体运动的同时,应能够实时观测胚胎细胞单粒子的形态;其次,为了获得细胞簇整体的运动趋势,必须同时追踪批量胚胎细胞;再次,考虑到胚胎细胞的活体特性,应尽可能减少追踪的处理时间,加强追踪算法的实时性;最后,为了避免人工操作造成的误差,上述工作应自动完成[7-8].然而,胚胎细胞整体运动趋势的获取与单粒子高分辨率细微结构的观测是一对矛盾.在显微视觉系统中,视野采集放大倍数越大,视野目标有效图像的分辨率越高,视野图像分析结果越精确;但对于非均匀分布的追踪目标,视野放大倍数的提高将导致可观测空间变小,进而带来较大的视野抽样误差.反之,如降低采样倍率,可以减小视野抽样误差,但目标的有效图像分辨率也会同时降低,加大显微图像处理与分析的难度.此外,暗场显微环境利用丁达尔光学效应提高观测物体本身与背景的对比,这虽然有利于观察运动的物体,但无法获取物体的细节信息[9].因此,为了获得胚胎细胞簇精确的运动趋势,需要在低倍暗场显微镜下进行观察;而为了得到单个胚胎细胞的形态和结构,又必须使用高倍明场显微镜.
针对以上问题,本文提出基于MR-6的批量胚胎细胞的自动追踪算法,该算法将微操作机器人系统引入胚胎细胞的迁移追踪与分析,根据显微系统的光学特性,实现快速追踪胚胎细胞,获取全局信息,并实现胚胎细胞感兴趣区域细节信息获取的自动化.在实验部分,将鸡胚胎的原肠胚形成过程作为模型,利用该算法完成鸡胚胎细胞迁移的自动追踪,并同时自动获取细胞整体运动趋势及感兴趣区域,以验证算法的有效性.
1 批量胚胎细胞的自动追踪算法
本研究算法流程如图1所示.
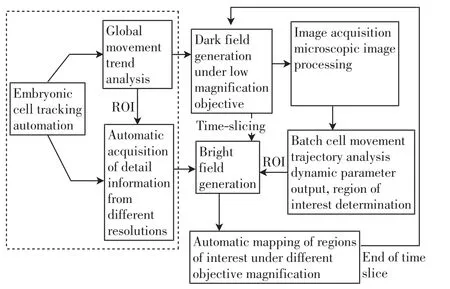
图1 胚胎细胞追踪自动化系统框架Fig.1 Framework of embryonic cell tracking automation system
1.1 胚胎细胞整体运动趋势分析的自动化
胚胎细胞整体运动趋势的分析在低倍率物镜下进行,对胚胎细胞全局显微图像中的批量胚胎细胞进行追踪,获取全局显微图像中批量胚胎细胞的个数及结构分布图,进而得到批量胚胎细胞的运动轨迹及运动速度,并形成感兴趣区域.
(1)暗视场图像采集
为了实现多细胞的快速精确追踪定位,需要提高胚胎细胞轮廓与背景之间的对比.在光的传播过程中,光线照射到粒子,当粒子尺寸小于入射光波长时,光波将环绕微粒而向其四周放射散射光.结合显微镜光学成像原理,使用暗视场完成对低倍率胚胎细胞全局显微图像的获取.
(2)胚胎细胞迁移的追踪策略
细胞的匹配是批量胚胎细胞迁移追踪的关键,考虑到细胞的运动具有群体性[10-11],本文提出基于群体细胞追踪获取单一细胞运动信息的追踪策略,该策略降低了识别的难度,同时能保证识别的正确率,其基本思想如下:
①设追踪的任意连续2帧图像为Ti、Ti+1,设C1为Ti中的任意一个细胞,围绕C1在Ti和Ti+1中分别选择一个诊断窗口wi和wi+1,对诊断窗口wi用多波段频率特征进行标识,并根据标识特征在Ti+1中定位相应的wi+1.
②以wi+1的中心为圆心、R为半径作一圆,则圆内的所有细胞C1j(j=1,2,3,…,m)都是C1所要配对的候选细胞,m为候选细胞的总数目.以每一个细胞C1j为中心,取与诊断窗口wi大小相同的诊断窗口,设为wij′(j=1,2,3,…,m).
③ 计算 2 个诊断窗口 wi与 wij′(j=1,2,3,…,m)的相关系数 Cij:

其中:f和g分别为诊断窗口wi和wij′的灰度分布函数,fm和gm分别为诊断窗口wi和wij′的的灰度平均值.
④在Ti+1中取得最大相关系数值的细胞C1j被认为与Ti中的细胞C1为同一细胞.
⑤记录C1细胞在Ti+1中的位置信息,位置信息由下式计算
其中: i、 j为图像像素的横、纵坐标位置;h(i,j)为坐标(i,j)处的灰度值;Ω为属于同一细胞的像素集合.
进一步,在细胞整体运动趋势的自动追踪策略中,细胞能够正确匹配的关键是准确标识诊断窗口的多波段频率特征.模拟人类视觉系统的并行多通道性[12-13],利用显微镜的光学特性,本算法采用基于光学特性的多波段频率特征获取的追踪策略,其基本思想如下:
①基于空间非相干照明的消象差成象系统,其光学传递函数的规范化傅里叶变换为

其中:fx、fy为空间频域,xi、yi为时间域,Hi(fx,fy)为点脉冲强度,∂1(fx,fy)为光学传递函数.
设显微系统的光学传递函数为Hlp(u,v),为了削弱细胞的细节成分,构造基于光学特性的高通滤波器:

②为了避免高通滤波时,图像的平均值降为零,进行高通滤波补偿,构造高频强调滤波器的传递函数为

其中:a为校正偏移;b为高频突出系数,b>1.
③设诊断窗口图像为f(x,y),其傅里叶变换为G(u,v),则诊断窗口的多波段频率特征为

(3)批量细胞运动轨迹分析与感兴趣区域的确定
根据追踪结果建立细胞运动轨迹并获取细胞运动动力学模型的参数.设细胞位置为{(x1,y1),(x2,y2),…,(xn,yn)},则第i个细胞的运动方向和曲率分别为
根据多波段频率特征的获取方法来统计频率特征的能量分布,以确定感兴趣区域.
1.2 胚胎细胞迁移中感兴趣区域细节信息的自动化获取
本系统根据显微镜齐焦合轴的特点在明视场下实现了低倍率物镜[14-16]下显微图像感兴趣区域细节信息的自动获取.显微图像感兴趣区域细节信息的自动获取策略如下:
首先根据显微图像的恒定窗口(1 024×768像素),得出中心点的像素空间坐标(512×384).在低倍镜下选择感兴趣区域,利用所选区域的左下角点的坐标A(x1,y1),求得其与中心点坐标之差(512-x1,384-y1).在4倍物镜下测量得每个像素大约为2.996μm,因此中心点到所选区域左下角点的x、y方向的距离为XA=2.996(512-x1),YA=2.996(384-y1).
根据距离不变原则,当换用高倍物镜时,微操作平台可以根据所选区域左下角到中心点的x、y方向的距离进行相应的移动,从而将4倍物镜下的左下角点移到高倍物镜下的中心点上.然后再根据所选区域右下角点的坐标C(x2,y2)计算C点和A点之间x、y方向的距离: XAC=2.996(x2-x1),YAC=2.996(y2-y1),C点和A点在x、y方向的距离即为所选区域的宽和高,根据宽和高可计算出在高倍物镜下,x、y方向的扫描范围为Sx=XAC/s,Sy=YAC/s,从而实现高倍物镜下感兴趣区域的自动定位,其中s为电动载物平台每次移动的距离.
2 自动化实验研究
实验采用MR-6微操作机器人系统平台,该系统机械手臂的运动范围为2 cm×2 cm×2 cm,电动平台的运动范围为10 cm×10 cm,在保证平稳运动的前提下,运动速度的范围为0.75~1500μm/s,运动精度可达1μm,同时,该系统还具有自动物镜转换与自动调焦功能.
鸡因其独特的生物学特性成为许多问题研究的重要模式生物,鸡的胚胎发育可以为人类和其他模式生物研究提供许多启示.自动化实验中以鸡胚胎的原肠胚形成作为研究模型,将追踪胚胎细胞迁移的自动化追踪方法应用于鸡胚胎细胞的迁移追踪实验中.考虑到细胞移动特性[2],利用微操作机器人系统每隔20 ms采集一帧鸡胚胎细胞图像并进行追踪分析,获取鸡胚胎细胞迁移的动力学模型参数.
在4倍物镜下经调焦得到点光源的衍射图像,即点扩散函数,如图2所示.

图2 点扩散函数Fig.2 Point spread function
在暗视场下采集到的细胞图像具有背景黑色、轮廓信息突出的特点,与明场显微图像相比,暗视场显微图像削弱了背景的干扰信息,使目标信息更加清晰,有利于观察细胞的运动过程.暗视场下的鸡胚胎显微图像示例见图3.
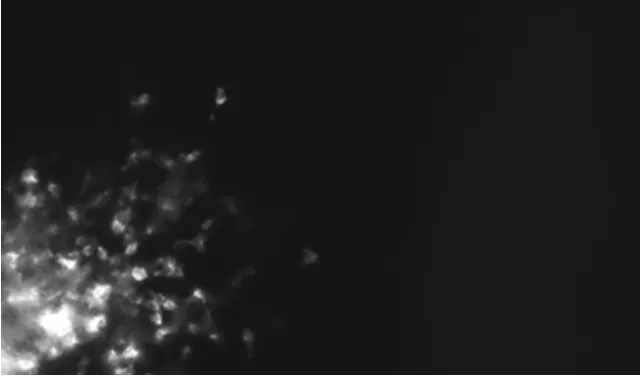
图3 暗视场下的鸡胚胎显微图像Fig.3 Microscopic image of chicken embryos under dark field
利用上述算法追踪图像序列中从第2帧(Timelapse GFPeggs R005_3-0002.tif,标号 02)到第21帧(Time-lapse GFPeggs R005_3-0021.tif,标号21)的41个细胞,其中部分显微图像见图4.

图4 追踪的显微图像序列示例Fig.4 Examples of tracking microscopic image sequence
多细胞追踪实验结果见图5.图5中,粉色标识块代表每个被追踪细胞的开始位置,蓝色路径形成了每个被追踪细胞的运动轨迹.

图5 鸡胚胎细胞图像序列中的多细胞追踪Fig.5 Multicell tracking in chicken embryonic cell image sequence
以图5中某个被追踪细胞为例,表1给出了图像序列中该细胞的位置信息,图6为该细胞的运动轨迹.
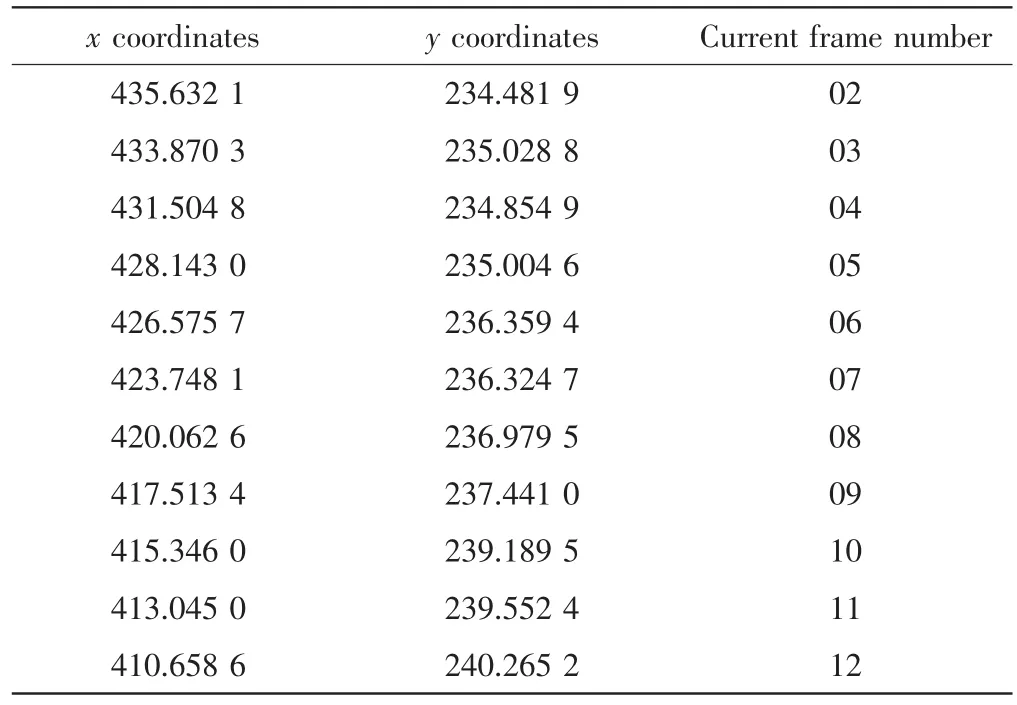
表1 被追踪图像序列中特定细胞的位置信息Tab.1 Location information of a specific cell in a tracking image sequence

图6 被追踪细胞的运动轨迹Fig.6 Trajectories of the tracked cell
由图5和图6可见,本算法能够在图像采集间隔20 ms内完成追踪分析任务,在鸡胚胎细胞显微图像序列中自动追踪细胞运动轨迹,获取运动细胞整体运动趋势,验证了算法的有效性.
3 结语
将微操作机器人系统引入胚胎细胞的迁移追踪与分析研究,在MR-6型微操作机器人系统平台上,根据显微镜成像原理,基于显微系统的光学特性,提出批量胚胎细胞的自动追踪算法,解决了整体运动趋势追踪与微细结构观测的矛盾,并通过自动化实验进行验证,实现了胚胎细胞迁移追踪的自动化.本文算法对于虚拟细胞建模具有重要意义,可用于以微生物为载体的运输机制、微细胞的分割技术和高速运动追踪等研究,在生物医学以及微机电系统等领域具有广阔的应用前景.
猜你喜欢
科普童话·学霸日记(2021年11期)2021-05-30 10:48:04
科学家(2021年24期)2021-04-25 12:55:27
含能材料(2021年1期)2021-01-10 08:34:34
光学精密工程(2016年4期)2016-11-07 09:04:52
光学精密工程(2016年3期)2016-11-07 09:04:17
工业设计(2016年8期)2016-04-16 02:43:24
阜阳职业技术学院学报(2015年4期)2015-05-17 03:58:58
温州职业技术学院学报(2014年3期)2014-03-11 19:03:39
组合机床与自动化加工技术(2014年12期)2014-03-01 02:23:02
兴趣英语(2013年9期)2013-11-28 05:49:22
