
双车道普通车辆—自动货车混合驾驶交通流建模与仿真
2018-12-28 06:37马新露胡月豪杨青也
交通运输系统工程与信息 2018年6期
马新露,胡月豪,杨青也
(1.重庆交通大学 交通运输学院,重庆400074;2.贵州交通职业技术学院,贵州550008;3.重庆市南川区公安局交巡警支队事故预防及处理大队,重庆408400)
0 引言
自动驾驶汽车的诞生给智能交通系统带来了革新,为迎合日益增长的物流运输需求,自动货车队列的想法应运而生.冯树民等[1]建立描述货车主动结伴成队的双车道元胞自动机模型,剖析了货车结伴特性及对交通流的影响;Zhao X.M.[2]引用群体智能控制方法探究自主车队系统中不确定性下的自组队、车距和车速稳定性控制问题;Huang M.等[3]提出了车辆队列数据驱动控制方案,使得每辆车都达到安全距离、期望速度,并通过input-to-state理论分析了稳定性和鲁棒性.自动货车队列的研究目前主要集中于自动车辆队列的控制方法和稳定性分析,而对包含自动货车队列的交通流研究较少,本文建立了高速公路双车道环境下的普通车辆—自动货车队列混合交通流元胞自动机模型(Cellular Automaton,CA),通过数值仿真探讨了自动货车运动特性及其队列形式对混合交通系统的影响.
1 模型的基本假设
1.1 自动货车队列
在高速公路中运用自动货车队列不仅带来运输效率的提高,且队列形式有利于减少空气阻力,降低能耗,被认为是可能率先落地的自动驾驶场景.本文假设:
(1)自动货车队列的头车及跟随车辆均为自动驾驶货车,具有敏锐的感知能力,借助车间通信系统队列间保持及时有效的信息交流,使车队安全平稳的行驶;
(2)自动货车队列因其速度较低,仅在行车道行驶,无换道行为;
(3)自动货车队列因其驾驶行为完全由计算机控制,不受随机慢化的影响.
1.2 普通车辆
本文假设自动货车队列对普通车辆驾驶员的影响主要反映在换道与随机慢化行为.
(1)当普通车辆前方、侧方也是普通车辆时,在满足换道条件的情况下以概率实现自由换道,其目的在获得更大的运行速度和驾驶空间,如图1(a)所示.
(2)当普通车辆侧方或前方为自动货车队列时,为摆脱由货车带来的驾驶紧迫感,在保证安全前提下会以概率通过换道驶离货车所在车道,如图1(b)所示.Gouy通过仿真模拟表明了驾驶员更倾向于减少自身的车头时距来达到远离自动驾驶车队的目的[4].
(3)以Pslow1、Pslow2来表示不同的驾驶情景下的随机慢化概率.Pslow1表示正常驾驶情况下普通车辆因受路面状况、驾驶心理等随机因素造成的减速,如图1(c)所示;Pslow2表示普通车辆的侧方为自动货车队列时,会尽可能的超过侧方车辆而提高驾驶注意力,减少了随机因素造成的减速,如图1(d)所示,故Pslow1>Pslow2.
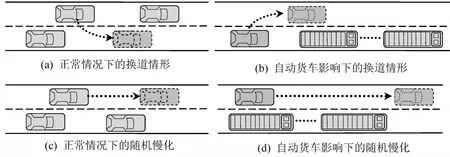
图1 普通车辆驾驶情景示意图Fig.1 Schematic diagram for the driving situation of ordinary vehicles
2 模型的建立
2.1 直行规则
本文在速度效应(Velocity Effect,VE)模型[5]的基础上,建立了自动货车队列和普通车辆从t→t+1时刻直行时的更新规则.
(1)加 速.

(2)减 速.
综合考虑与前车的车间距Gapn(t)、前车的行车状态(静止或运动),以及前车在下一时刻的虚拟速度,分为安全减速和确定性减速.当前车静止,vn+1(t)=0时,执行安全减速规则;当前车运动,vn+1(t)≠0时,执行确定性减速规则,两者均出于安全因素考虑应保证该车与前车的车间距大于dmin.
安全性减速为

确定性减速为

(3)随机减速.
普通车辆以随机慢化概率Pslow1、Pslow2减速;自动货车队列无随机慢化.
普通车辆为

自动货车队列为

(4)在速度更新之后进行位置更新.

式中:xn(t)为第n辆车t时刻车头所在的位置;gapn(t)为第n辆车与前车n+1前后保险杠的距离,为第n+1辆车的车身长度;是第n+1辆车从t→t+1的虚拟速度,表示为前车由NaSch模型的速度更新规则得到的最小可能速度,其中若前车为普通车辆考虑随机慢化效应,若前车为自动车辆则不考虑.
普通车辆为
自动货车队列为

2.2 普通车辆换道规则
普通车辆在直行过程中,若符合换道条件,则执行换道规则.换道条件以STCA-Ⅱ模型[6]为基础进行了改进.
换道动机为

为避免频繁换道,设v̈n(t+1)为换道成功的虚拟速度,若其值小于t时刻与前车的间距gapn(t)则不进行换道,即

考虑邻道后车与该车速度差的安全换道条件为

式中:gapn,other(t)、gapn,back(t)分别为第n辆车与邻道前车及后车的车间距;vback_max为第n辆车的邻道后车最大速度;dn作为确保安全换道情况下两车的缓冲距离,dn≥1m,如图2所示.

图2 普通车辆换道示意图Fig.2 Schematic diagram for the lane change of ordinary vehicles
2.3 普通车辆换道概率模型
普通车辆在同时满足2.2节所述条件后,图1(a)和图1(b)的不同情景以不同换道概率换道,情景(a)中符合正常情况下的换道情形,取值0.55[7];情景(b)中普通车辆跟随货车行驶,随着车间距的减少逐步带来的压迫感,此时换道压力会随着车间距减少而增加,换道概率呈现S曲线,以Logistic曲线表示车辆越靠近最迟换道位置压力越大[8].本文考虑Richards增长曲线[9],通过其中一个参数在数轴上滑动取值,不仅包含了Logistic等曲线方程,而且更具普适性.

式中:W为t时刻的总增长量;A为总增长量的极限值;B为初始值参数;k为增长速度参数;m为曲线形状参数.
图形是以A为渐近线的S形曲线,其大致形状如图3(a)所示,随着t的增加W从零开始呈曲线增长,当m=2时即为Logistic模型.
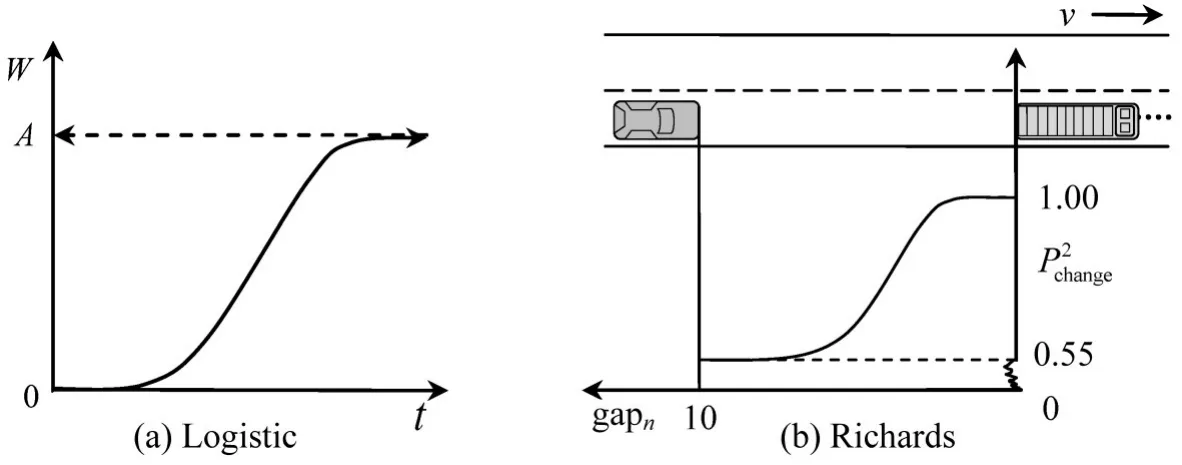
图3 Logistic曲线及改进后的Richards曲线Fig.3 Logistic curve and improved Richards curve
由Richards模型改进后的换道概率模型为

模型描述了图1(b)的情景:当普通车辆跟随货车行驶,若gapn(t)>100m时,车间距较大,普通车辆不受货车影响实现自由换道,即;若gapn(t)<100m时,随gapn(t)的减小货车带来的换道压力逐步变大,换道概率呈S曲线递增,如图3(b)所示.需指出的是,换道概率模型参数的不同对模拟产生一定的影响,但参数的选取是为了更好地描述从0.55开始逐步由缓到急递增1.00,而其对应横坐标gapn(t)范围为0~100 m主要参照相关交通法规而来.
3 仿真设计及结果分析
3.1 仿真参数标定
本文模拟了车道长度为L的双车道高速公路环境,普通车辆数量为N1,自动货车数量为N2,则车道上车辆总数N=N1+N2,系统总密度ρ=N2L;t时刻车辆平均速度为;为表示车辆的混合程度,引入混合比例系数r,表示自动货车数量与总车辆数的比值,0≤r≤1.
模拟中,1个元胞为1 m,普通车辆每辆车占据6个元胞,对应实际长度6 m;自动货车每辆车占10个元胞,对应实际长度10 m;双车道共有12 000个元胞,对应实际道路长度6 km.普通车辆最大速度33 cells/s,实际118.80 km/h;加速度3 cells/s2,实际3 m/s2.自动货车最大速度22 cells/s,实际79.20 km/h;加速度2 cell/s2,实际2 m/s2.采用周期性边界条件,初始状态下,普通车辆在超车道、自动货车在行车道上按混合比例r随机分布,初始速度内随机赋值.每次演化10 000时步,记录后2 000时步的速度vt;将得到平均参数值,得到1次运行的平均速度,;超、行车道流量flux1、flux2平均流量,flux=(flux1+flux2)/2.为消除初始状态的随机性对结果的影响,再对10个样本取平均.
3.2 仿真结果分析
3.2.1 基本图分析
图4(a)和图4(b)是不同自动货车比例下的双车道平均流量—密度、平均速度—密度基本图.从图4可知,当r较小范围内(0.10~0.40),道路通行能力最大值差异不大,约为2 500 veh/(km·h);当r=0.60时,此时道路通行能力约为2 300 veh/(km·h)略低于r小范围的值.
(1)在双车道混合交通流下,随着自动货车比例的增加,在低密度自由流区域,道路通行能力差异不大,均呈稳定上升趋势并达到最大值.
(2)在高密度区域自动货车比例变大对流量的影响逐步显现,密度越大、比例越大其通行能力越小,车道的平均速度略有下降.这是由于双车道混合交通流中,普通车辆存在换道行为,且自动货车的最大速度低于普通车辆,当车道密度过大时,普通车辆若从超车道换回行车道极有可能因前方是货车而降速,也将导致整个系统的平均流量和速度降低.
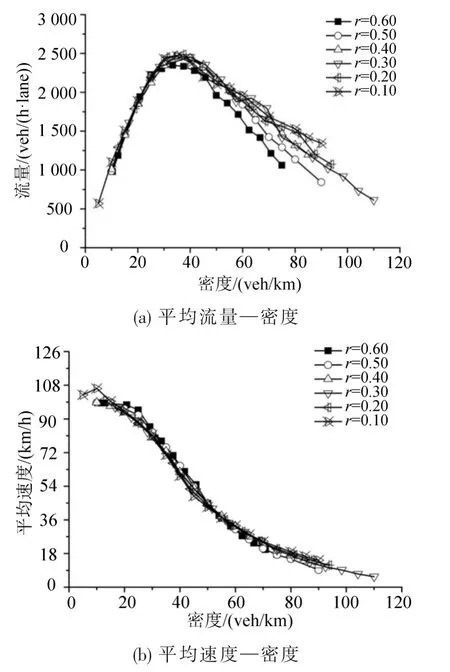
图4 不同自动货车比例下的基本图(两车道的均值)Fig.4 Base map under different proportions of automatic driving trucks(Mean value of two lanes)
图5(a)~图5(d)是将双车道分为行车道和超车道单个车道的流量—密度、速度—密度基本图.
(1)对比分析图5(a)和图5(b)可以发现:在同比例下两车道流量都随密度的增大先增加后减小,但当r较大时(r=0.50、0.60)超车道曲线出现交叉点,这是因为,此时自动货车对行车道的道路占用率并不高,普通车辆有机会在两车道间实现自由换道,提高了系统的通行能力.随着密度持续增加,在流量达到最大后又骤降.而当r较小时(r=0.10~0.30),自动货车不换道对行车道的占用率过高,换道条件愈加苛刻导致普通车辆换道较少,多在行车道行驶,故超车道的流量在r值较大时,流量走势平缓.
(2)对比分析图5(c)和图5(d),可以发现:行车道和超车道的平均速度随r的增加两个车道呈相反特征.相同混合比例下,超车道的平均速度均高于行车道的平均速度.当r=0.60时,相较于其他比例,超车道的平均速度最大,行车道的最小;而当r=0.10时却恰恰相反,超车道的平均速度最小,而行车道的最大.这也可看出,随着自动货车数量的增加会导致行车道变得拥挤,平均速度降低.
3.2.2 换道频率影响分析
换道频率与道路的交通流密度相关,在周期性边界条件下对换道频率定义为:单位时间内系统路段上产生换道的车辆数与总车辆数的比值,即

式中:qi为换道概率;Nc为产生换道的车辆数;N为系统路段上的总车辆数.
需要说明的是,本文仿真中仅有普通车辆存在换道情况,故换道概率没有以通过断面的车辆数进行计算,进而总车辆数等于普通车辆总数.
图6是不同混合比例下普通车辆换道频率基本图.可以看出,不同比例下换道频率随密度的增加先增后减.各混合比例下的曲线在密度为50~100 veh/km的范围内有重叠区,此时的密度虽过了最大流量值,但行车道的道路资源相当充裕,车流表现为自由行驶,即使普通车辆受阻于自动货车,也能极易获得安全变道条件;但是伴随着密度的增加,进入高密度区时,受阻普通车辆的变道需求进一步增加,而自动货车仅在行车道行驶,难有富裕道路空间供普通车辆变道.于是,图6中密度ρ>100veh/km以后,自动货车的混合比例系数r值越大其普通车辆换道的频率就越低.
图7是将普通车辆的变道行为划分为两类的换道基本图.一类是普通车辆的前车为普通车辆情形下的换道(m1);另一类是前车为自动货车情形下的换道(m2).m1情形下,普通车辆的换道次数随混合比例的增加而降低,各曲线走势相同,无交叉区,各比例下的换道次数差值较大;而m2情形下各曲线走势虽相同,但曲线在低密度区域至高密度区域均有交叉重叠部分.r过大(r=0.60)或过小(r=0.10)其普通车辆的变道次数都略低于r的中间值(r=0.20~0.50).由此,为提高道路资源的利用效率,让普通车辆受阻时可以更灵活地变道,而自动货车的比例也应适中.
3.2.3 自动货车队列长度的影响
自动货车队列长度是影响普通车辆变道决策及变道频率的重要因素之一.因此,图8和图9给出了同密度(50 veh/km)不同比例下自动货车队列长度对平均速度及换道频率的影响.
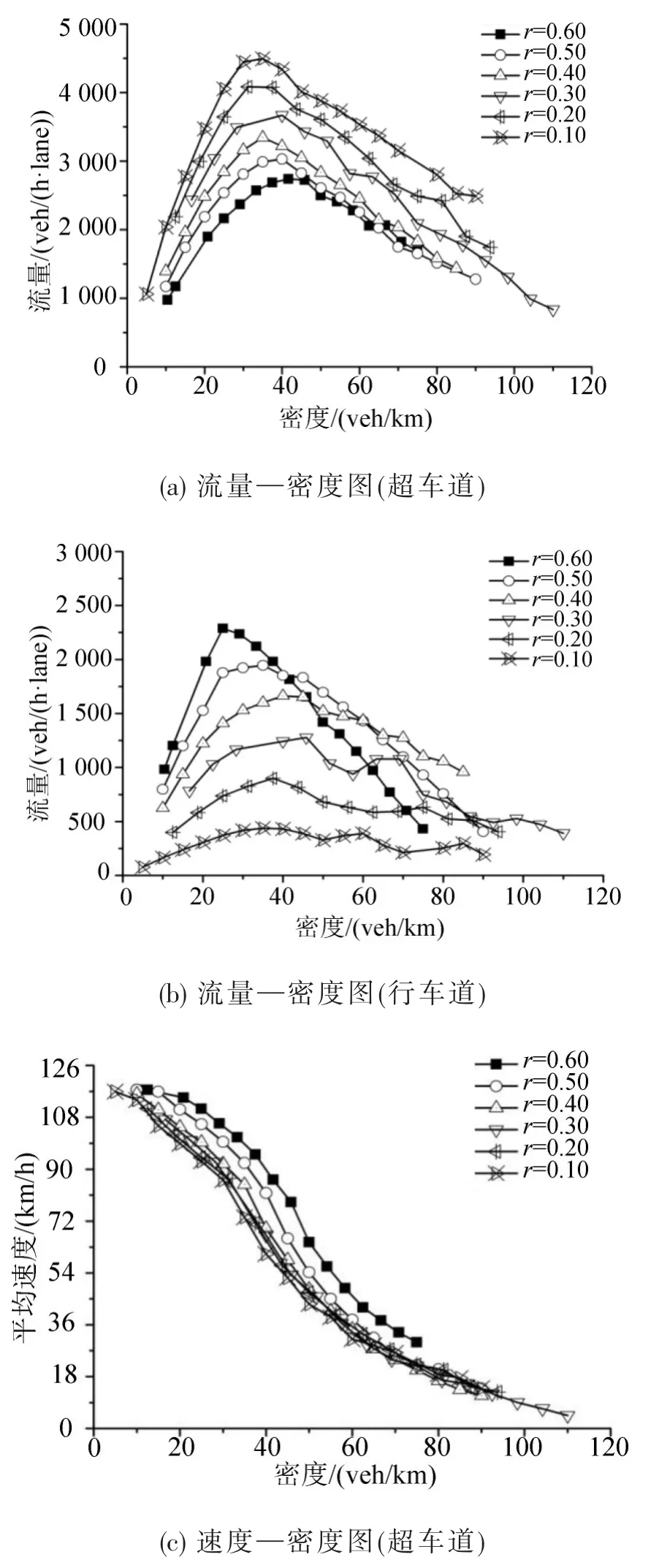
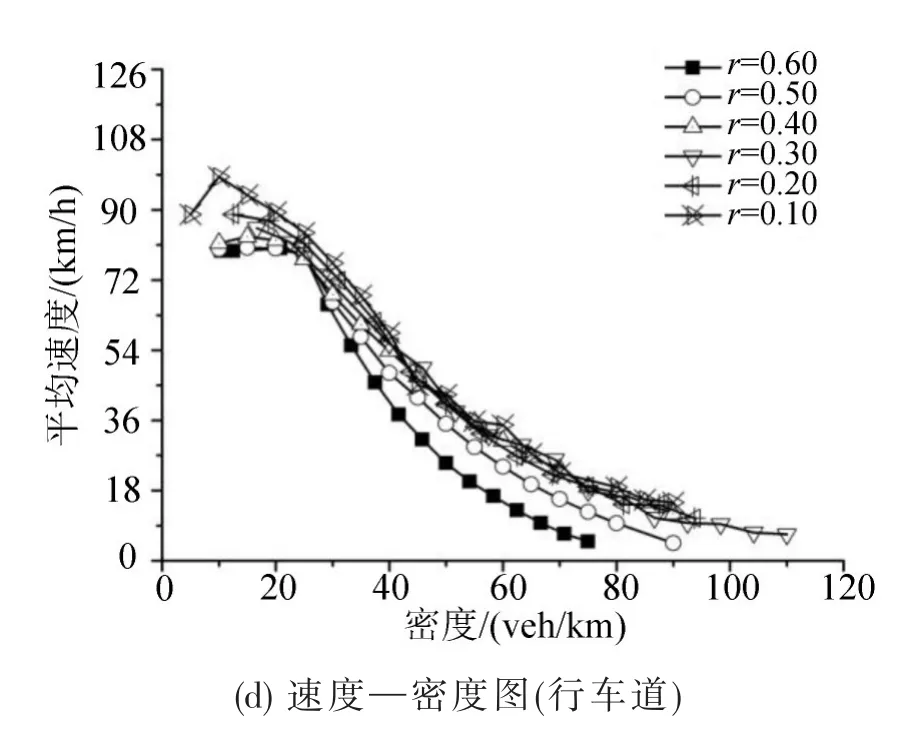
图5 不同自动货车比例下的基本图Fig.5 Based map under different proportions of automatic driving trucks
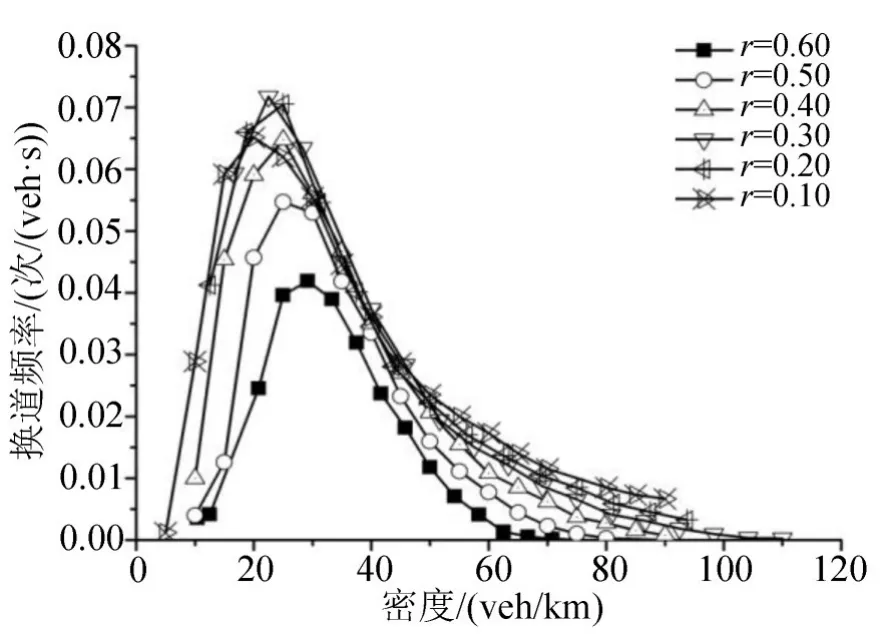
图6 不同自动货车比例下的换道频率(两车道的均值)Fig.6 Lane changing frequency under different proportions of automatic driving trucks(Mean value of two lanes)
在比例系数较小时(r=0.10~0.30)车道的平均速度差异很小,自动货车队列和普通车辆能保持较理想的状态平稳行驶.伴随着货车队列长度的增加和比例系数的加大,平均速度增大,换道频率随之升高,并在r=0.60、货车队列长度L=12、L=10时分别达到峰值,平均速度约21 cells/s、换道频率约为0.03次/(veh·s).
正如模型所体现的那样,货车是否以组队形式出行会影响道路交通流的状态.当自动货车为单个车辆行驶时,虽占用的道路空间分散,但因货车阻挡视野、车速较低等因素让普通车辆的变道条件变得苛刻,无法获得更高的车速,影响到了车辆间的平衡,道路资源没有得到充分利用.在混合交通流下,自动货车队列出行更有利于系统整体性能的提高.但也应视混合交通流的具体情况(混合比例、队列长度、限速要求等)而定,才能更好地提高公路的运行效率.
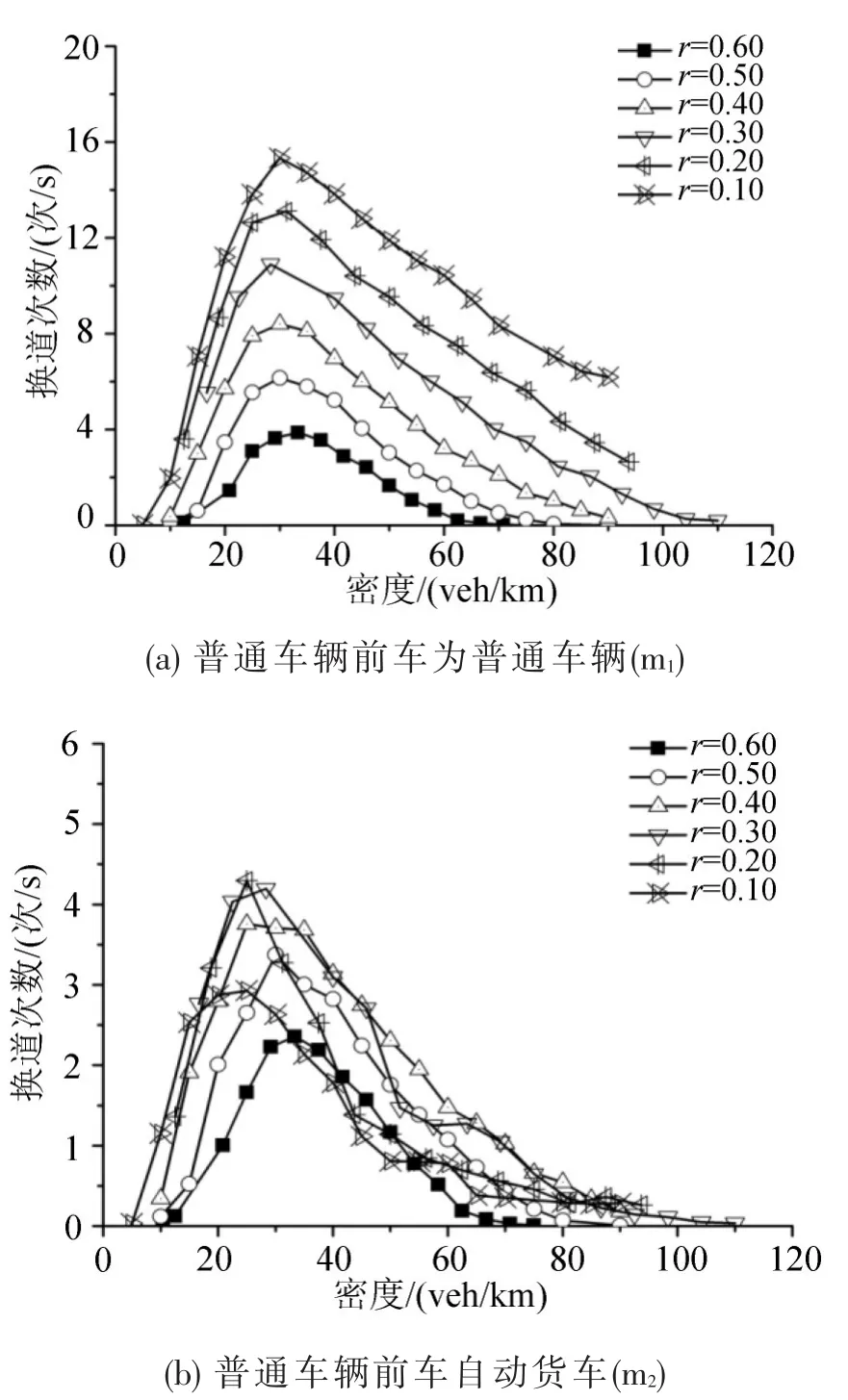
图7 不同自动货车比例下的换道次数—密度图Fig.7 Lane changing times-density chart under different proportions of automatic driving trucks
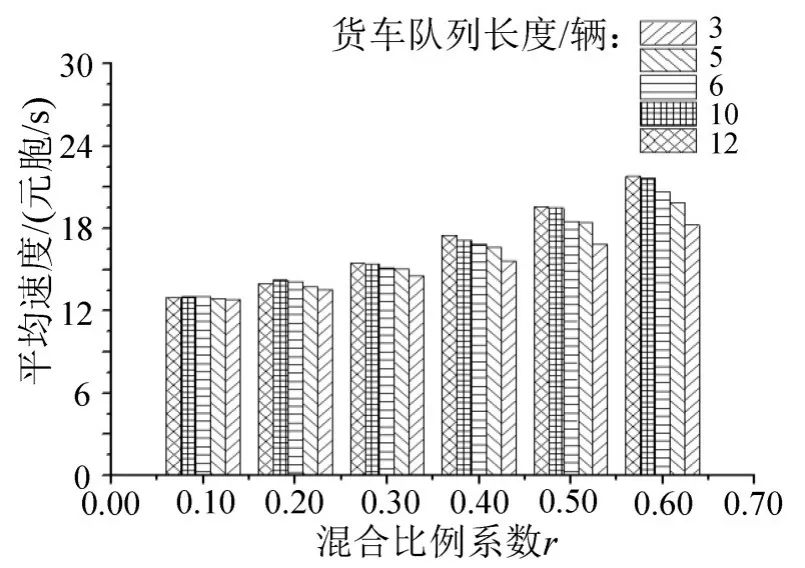
图8 速度—比例系数柱状图Fig.8 Bar chart of velocity-proportionality coefficient
3.2.4 速度特性分析
在双车道混合交通流环境中,自动货车队列的稳定性也是影响道路通行能力的一项重要特征,而速度正是衡量车辆行驶稳定的直接参数.在固定密度(50 veh/km)的条件下,得到普通车辆和自动货车队列不同长度时速度时变曲线,如图10所示.不同长度货车队列的平均速度波动较大,波动性随着队列长度的增加也逐渐演变剧烈,但平均速度整体呈上升趋势;普通车辆的平均速度变化波动较小,基本在15~19 cells/s左右平稳地小幅波动.
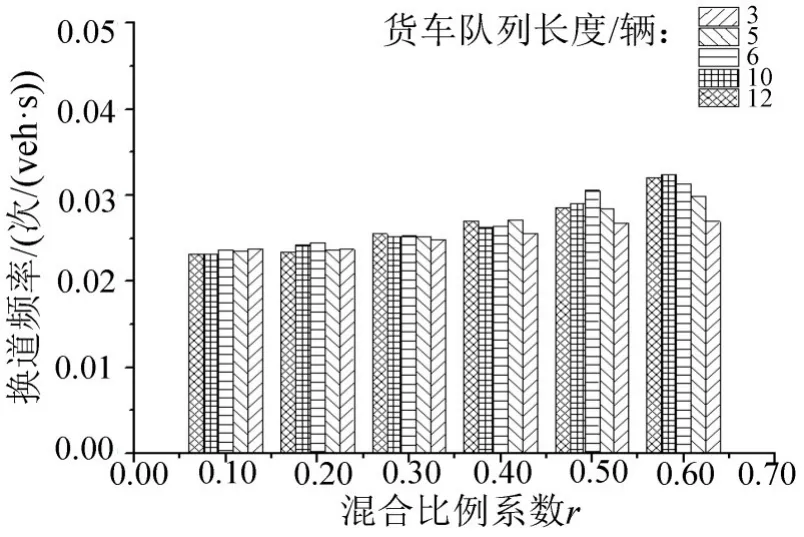
图9 换道频率—比例系数柱状图Fig.9 Bar chart of lane changing frequencyproportionality coefficient
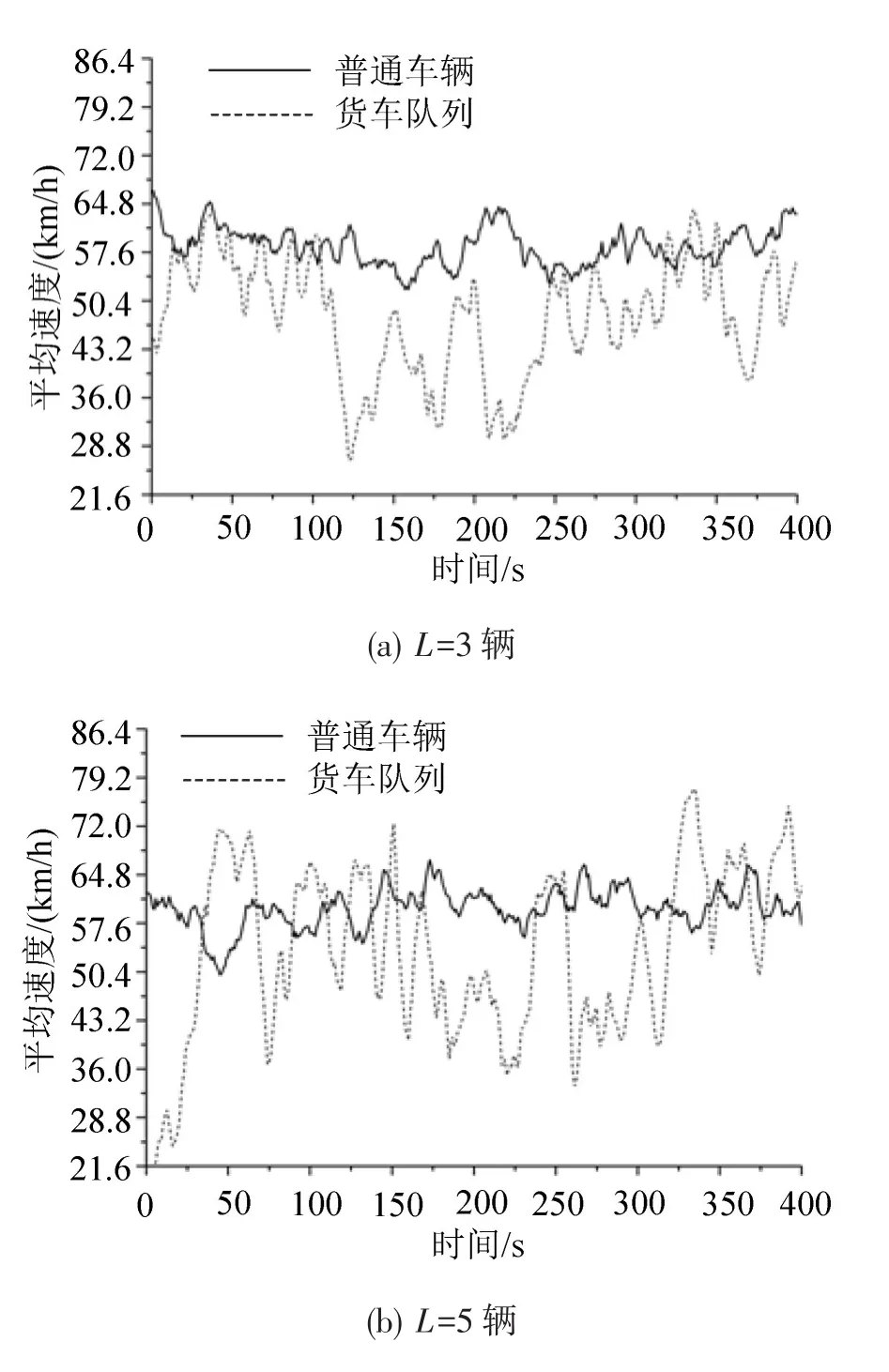
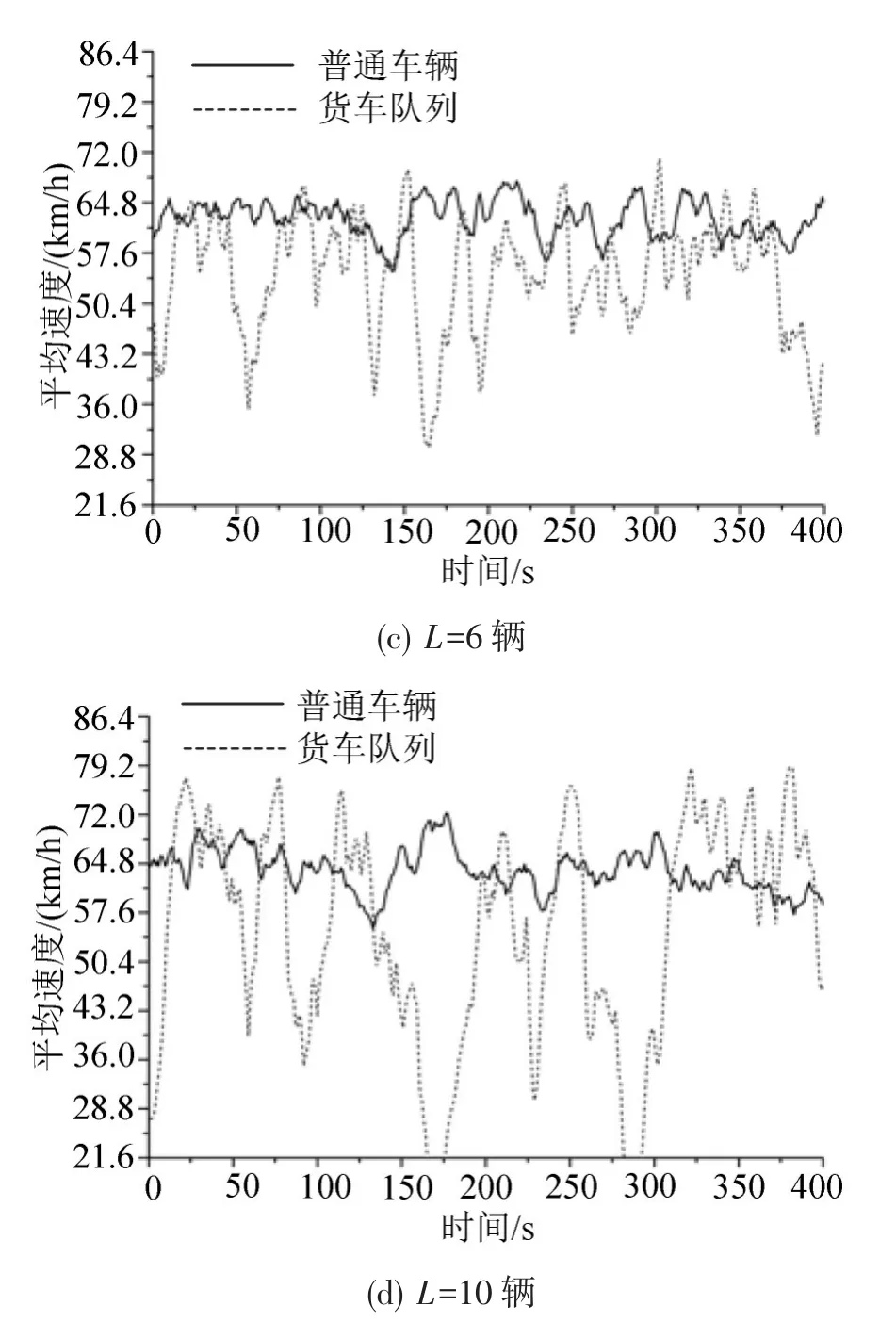
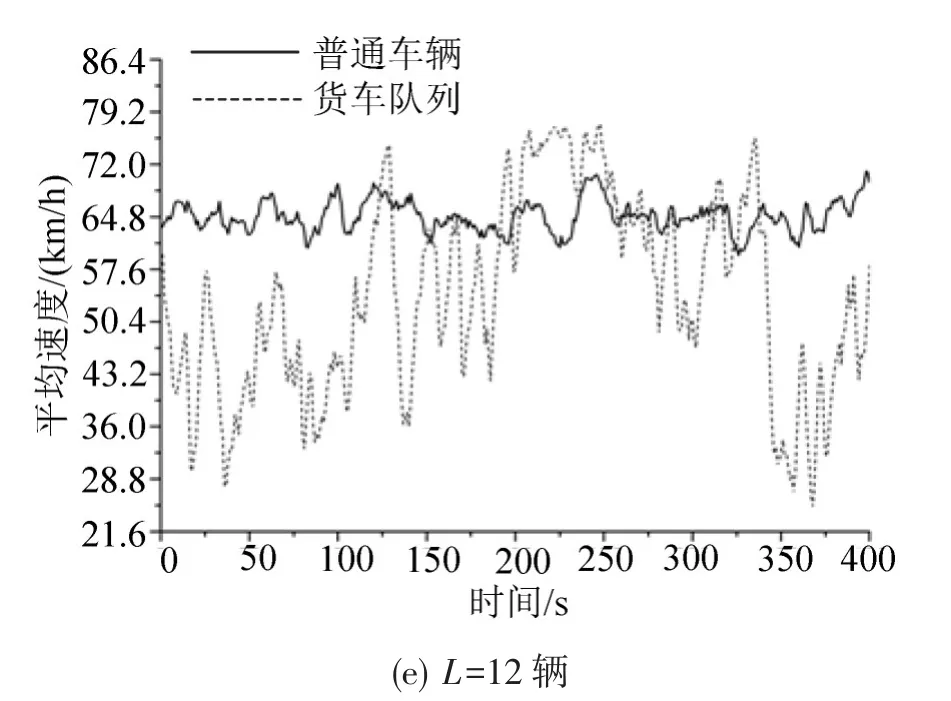
图10 普通车辆与自动货车的平均速度—时间图Fig.10 Average velocity-time chart of ordinary vehicles and automatic driving trucks
由图10得到表1数据.由表1更直观的发现,伴随着货车队列长度的增加,普通车辆平均速度增大且波动趋于稳定,益于普通车辆平稳行驶;对货车队列而言虽然平均速度有所提升,但其波动范围扩大,不利于货车车辆平稳运行.
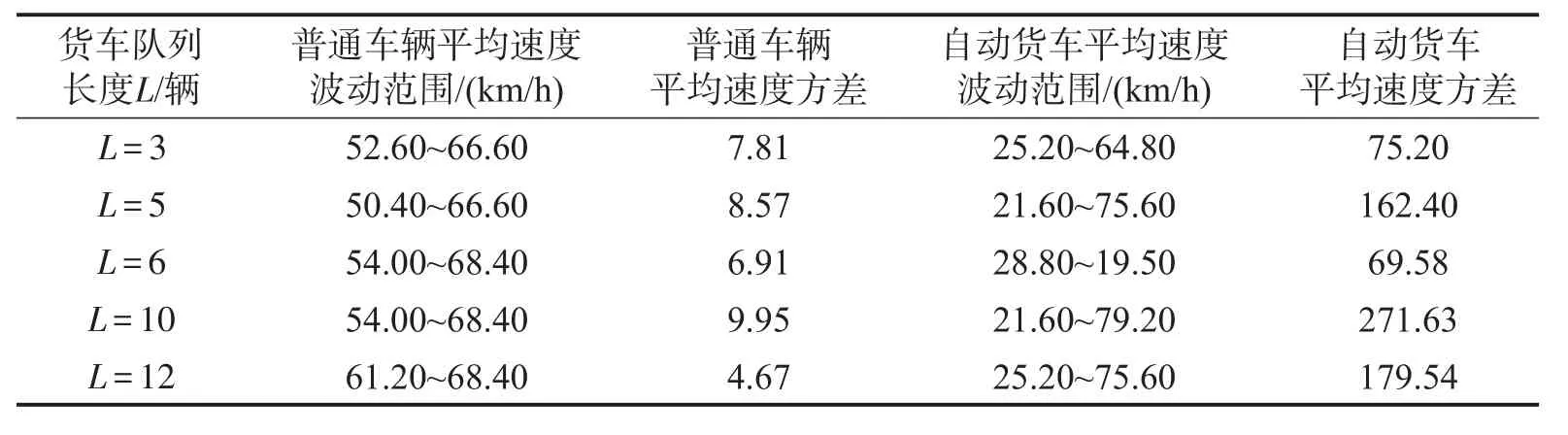
表1 两类车型平均速度波动范围Table 1 Fluctuation range of average velocities of two kinds of vehicles
4 结论
本文通过对双车道普通车辆—自动货车队列混合交通场景的建模与仿真表明,作为一种高效低耗的物流方式,自动货车队列对交通系统会产生一定程度的影响.在流量较小时,自动货车队列对普通车辆行驶影响甚微;而当流量较大时,会抑制普通车辆变道,进而影响系统的平均速度和通行能力.此外,自动货车队列的长度也是影响交通系统整体效率的重要因素,队列越长,虽有益于提高系统效率,亦会导致自动货车间车速波动增大,对自动货车个体的稳定性控制要求也越高.本文模型基于现实发展的合理假设,但直行规则的速度效应未应用到换道规则中,需在后续研究中加以补充.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
中学生数理化·八年级物理人教版(2020年9期)2020-11-16
山东交通科技(2020年3期)2020-08-05
中外公路(2020年1期)2020-06-06
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
湖南交通科技(2020年1期)2020-04-08
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
军营文化天地(2018年2期)2018-12-15
