
鹤式起重机的耦合创新设计方法
2018-12-25 03:02:22尚宝平张国智肖艳秋
中国工程机械学报 2018年6期
尚宝平,黄 航,张国智,肖艳秋
(郑州轻工业学院 机电工程学院,郑州 450002)
在重型设备的设计中,可靠性指标是设计和研发过程中必须考虑的一个性能因素,尤其在当今科学技术飞速发展与地球能源消耗急剧增加的今天,同时,也是顺应了当今高效、可靠地解决实际工程问题中工程应用的发展趋势.要想做到这一点,必须要有效地应用现代仿真技术、创新设计方法、可靠性分析等现代设计方法.目前,在起重机设计方面,现代仿真技术等在相关结构及机构方面有了一定的应用,如:2 500 t环轨起重机主臂架的优化设计[1];履带起重机臂架结构可靠性分析[2];塔式起重机起重臂正向设计方法研究[3];桥式起重机随机应力谱获取及疲劳剩余寿命估算[4];基于拓扑优化的桥式起重机新型主梁设计[5];基于ANSYS的4 500 t浮式起重机主梁结构优化设计[6];随车起重机伸缩臂的非线性接触有限元分析[7];基于GA-FEA的门座起重机变幅机构优化设计[8];龙门起重机金属结构的多目标动态优化[9];基于MCMC的桥式起重机疲劳寿命可靠性灵敏度分析[10].现代设计方法在起重机应用中日益广泛,但对机构创新设计方法的研究还存在一些问题和不足,基于此,本文针对可调节鹤式起重机的机构创新设计等进行了系统、深入的研究.
1 基于TRIZ理论和可靠性分析的耦合设计基本思路
TRIZ理论具有良好的可操作性、系统性和实用性,它能够帮助我们系统地分析问题,快速发现问题本质或矛盾.针对固定设计原形,基于多功能调节思路,进行多功能创新设计,在创新设计的同时,运用TRIZ理论中39个通用的工程参数与40条发明原理,把实际问题转换为对应的TRIZ标准问题;然后,以TRIZ理论中发明问题的解决策略作为指导方法,最终演绎得出实际解决方案.并结合可靠性分析,筛选创新设计方案,具体的耦合创新设计的基本思路如图1所示.
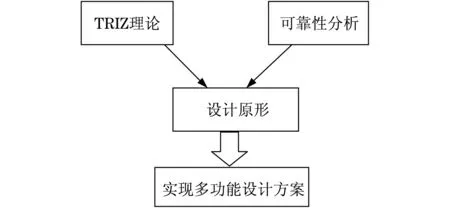
图1 基于TRIZ理论和可靠性分析的耦合设计方案Fig.1 The coupling design scheme based on TRIZ theory and reliability analysis
2 鹤式起重机的等势能起吊条件的建立
鹤式起重机机构简图如图2所示.鹤式起重机在起吊的过程中势能不变,图2中的虚线为起吊终点时刻,令EF=E′F′=h,FF′=l,DF′=a,AD=l1,AB=l2,BC=l3,CD=l4,CE=l5,∠DAB=φ0,∠DAB′=φt.因势能不变,经过推导,鹤式起重机的等势能起吊条件为
(1)
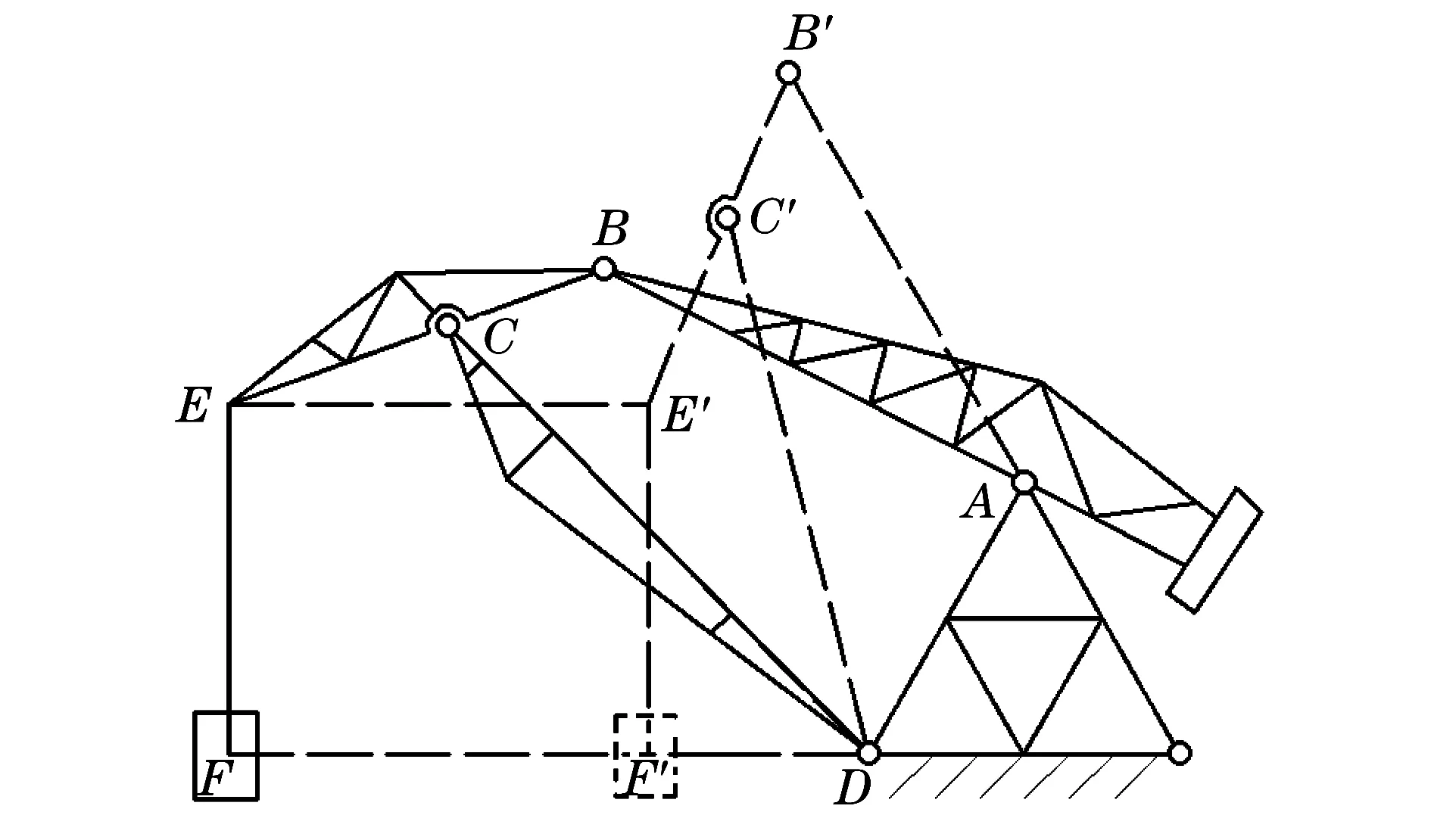
图2 鹤式起重机机构简图Fig.2 The mechanism diagram of the crane
由式(1)可见,通过改变杆件初始和终点起吊角度以及3个杆件的长度去实现改变起吊高度、物体移动距离等起吊参数,得出了起吊参数对该机构的影响规律,即通过改变杆件各参数可实现.
3 鹤式起重机的可靠性分析
如图3所示,在ANSYS中建立鹤式起重机机构的有限元模型,机构各个杆件参数及对应符号如表1所示.应用ANSYS的PDS模块,研究各杆件参数的随机波动性对起吊终点Y向位移的影响.采用中心复合抽样的方法,迭代次数为27,再通过蒙特卡罗扩展求解,扩展计算迭代次数为10 000.
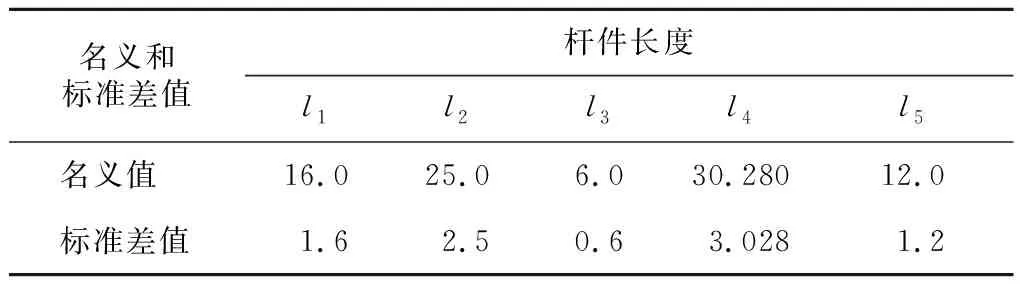
表1 机构各个杆件参数Tab.1 Parameters of all links of the mechanism dm
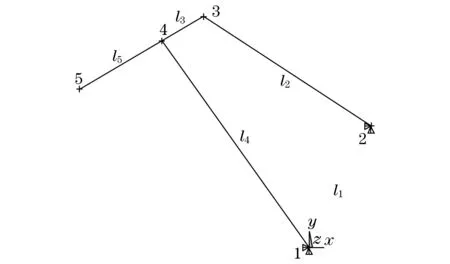
图3 鹤式起重机机构的有限元模型Fig.3 The finite element model of the crane
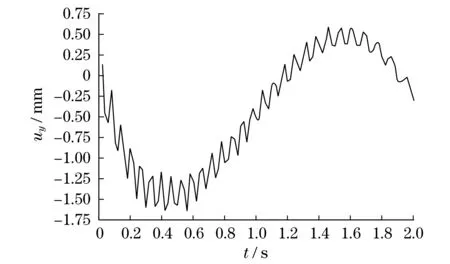
图4 起吊端Y向位移曲线Fig.4 The Y displacement curve of the lifting end
对鹤式起重机起吊过程进行了动态分析,其中初始起吊时φ0=90°,起吊结束时φt=120°,在起吊过程中的起吊端Y向位移曲线、速度曲线和加速度曲线如图4和图5所示.从图4中可见,起吊端Y向位移仅为0.04 dm,基本是势能不变,由式(1)可见有限元计算的准确性,并且位移变化较小,基本是等势能起吊.从图5中可见,在起吊过程中起吊端在起吊之初速度和加速度变化较大.
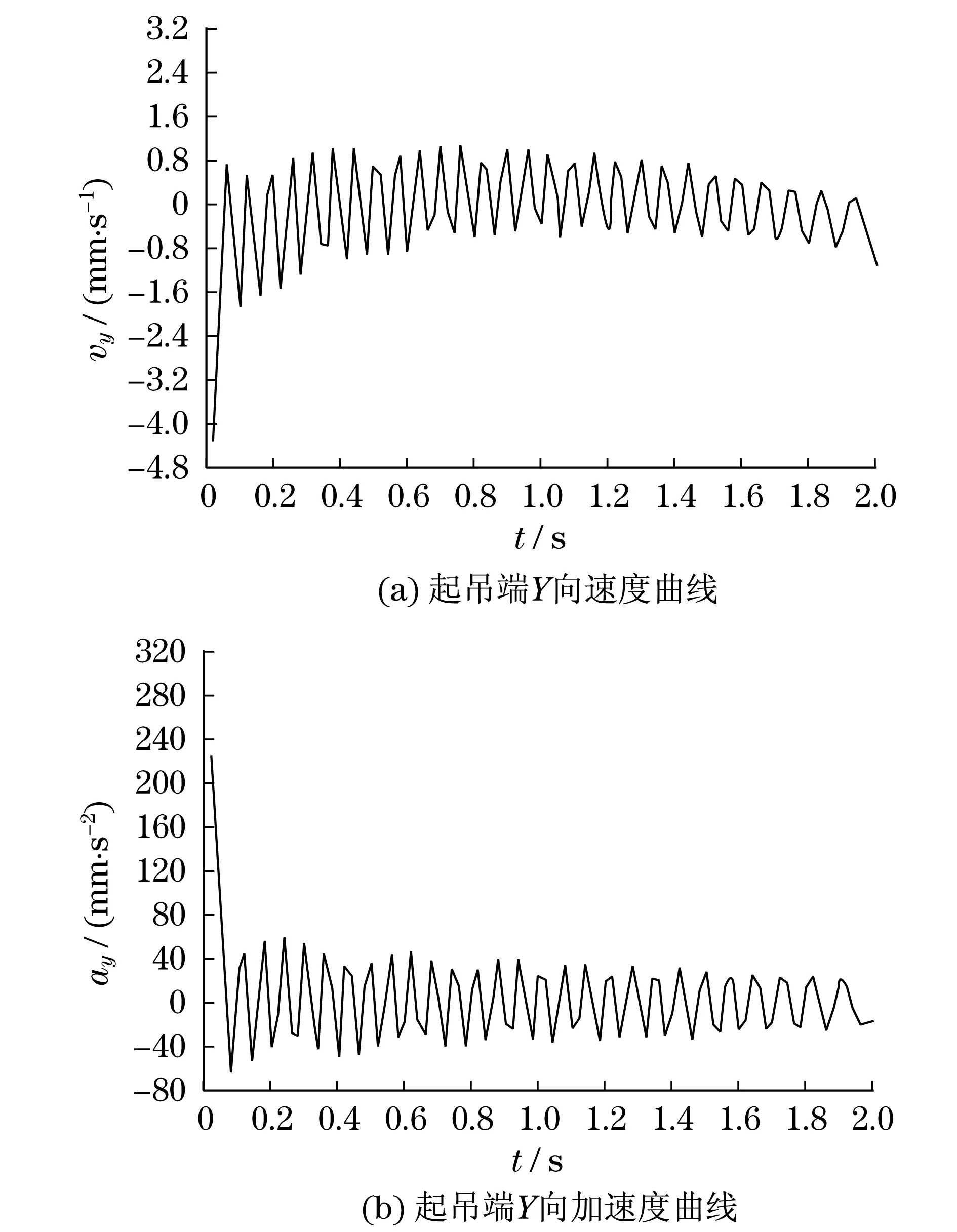
图5 起吊端Y向速度和加速度曲线Fig.5 The Y speed and acceleration curve of the lifting end
对鹤式起重机机构进行可靠性分析,鹤式起重机的输出性能参数为起吊高度变化,假设机构各个杆件随机波动,根据抽样分析结果,图6所示为拟和响应曲面图,可知4个杆件长度与鹤式起重机的起重高度变化呈非线性响应关系.图7(a)为起重机的起吊高度分析结果,可知当各杆件长度有10%波动时,鹤式起重机的起重高度变化范围为-6.4~9.2 dm.图7(b)为响应曲面法扩展计算敏度分析结果,鹤式起重机的起吊高度变化对杆2的敏感程度最为敏感,而对杆4最不敏感.由式(1)可知,此结论与理论分析结果相一致,由此也证明了该可靠性分析的正确性.
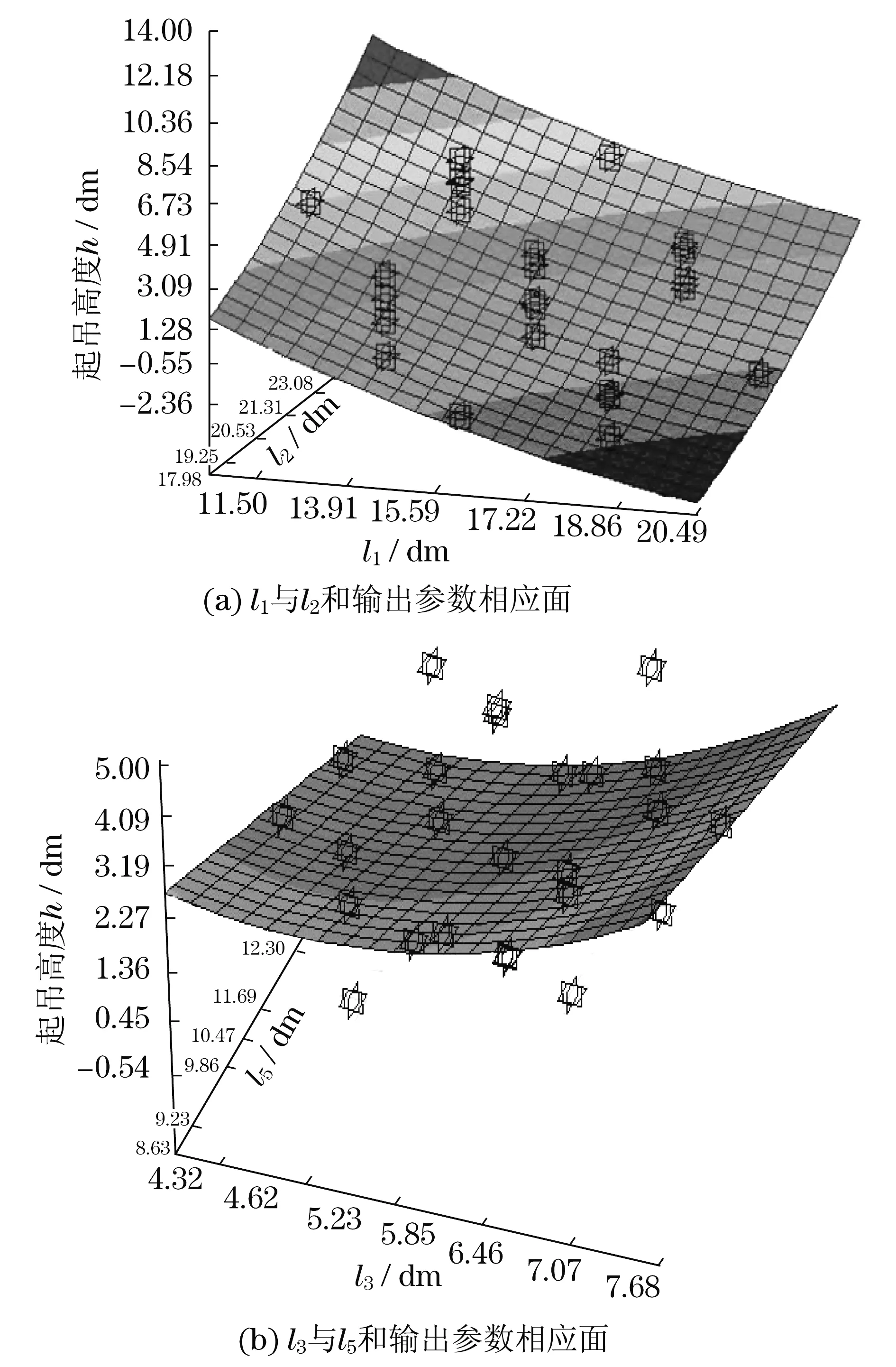
图6 中心复合抽样分析的响应曲面图Fig.6 The response surface chart of the central composite sampling analysis
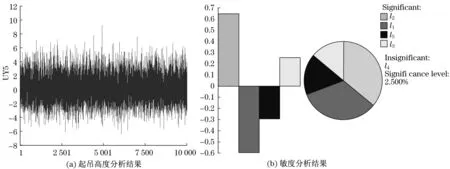
图7 起重机响应曲面法扩展分析结果Fig.7 Extension analysis results of crane with response surface method
4 可调节鹤式起重机的创新设计方案
在鹤式起重机起重参数进行调节时,根据TRIZ理论可将各个杆件变为伸缩式,结合可靠性分析结果,为确保起重的等势性,尽量改变杆件3和杆件5,即改变起重机的起吊臂.为了保证等势性,必须严格控制杆件1、杆件2的加工和装配精度.
5 结论
(1) 通过对某鹤式起重机的有限元分析,可知起吊结束时起吊端的位移仅为0.04 dm,基本势能不变,由此验证了文中所建立的等势能起吊条件与有限元分析的准确性.
(2) 通过对某鹤式起重机机构的可靠性分析得出,鹤式起重机的起吊高度变化对杆件2最为敏感,对杆件4最不敏感.
(3) 由鹤式起重机机构的可靠性分析结果可知,为了保证起重的等势性,必须严格控制杆件1、杆件2的加工和装配精度.
通过以上分析和研究,为起重机的可靠性和机构创新设计提供了分析方法,并为其杆件的加工与装配精度提供了参考依据.
猜你喜欢
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:48
——《势能》
文化纵横(2022年3期)2022-09-07 11:43:18
中学生数理化·八年级物理人教版(2022年6期)2022-06-05 06:55:40
中学生数理化·八年级物理人教版(2021年6期)2021-11-22 07:49:52
四川建筑(2021年1期)2021-03-31 01:01:46
建筑机械化(2020年7期)2020-08-15 06:41:32
中国特种设备安全(2018年10期)2018-12-18 02:16:46
石油化工建设(2018年2期)2018-07-11 01:24:56
科技创新与品牌(2016年8期)2016-09-29 22:25:52
工程建设与设计(2016年1期)2016-02-27 10:50:15
