一种自适应的RFID防碰撞算法
2018-12-20 01:56:54任柏翰张圣杰石浩森
计算机技术与发展 2018年12期
任柏翰,张圣杰,石浩森,宫 婧
(南京邮电大学,江苏 南京 210023)
0 引 言
射频识别(radio frequency identification,RFID)技术可以通过无线电讯号实现无接触式自动识别,由于其具有阅读速度快,可适应于各种恶劣环境,读写能力快等优点,现已广泛应用于交通物流、食品管理、图书馆书刊借阅、门禁等各个领域[1]。但当多个标签同时与读写器进行信息传输时,会出现“碰撞”现象,使阅读器无法正常工作,严重影响系统正常运行。为解决这一问题,现已提出了多种RFID防碰撞的算法[2]。
1 当前防碰撞算法
常用的防碰撞算法一般可以分为两类:确定算法和非确定算法[3]。非确定算法主要是基于ALOHA算法,包括时隙ALHOA算法、分群时隙ALOHA算法等。确定性算法主要是基于二进制树搜索的算法,包括二叉树搜索算法、动态二叉树搜索算法、自适应树搜索算法等[4]。
纯ALOHA算法[5]就是当需要发送数据时,标签以循环序列形式发送数据,在第一次发送之后,需要等待相对较长的时间再次发送数据,直到所有标签都完成了数据的发送。时隙ALOHA算法[6]把时间以帧为单位分成时间段,每个时间段由若干个时隙组成,标签发送数据帧只能在时隙开始时发送,按照这种方法,可以大大减少因为帧重复引起的冲突。
二叉树搜索[7]的基本思想是将处于冲突的标签分成左右两个子集0和1,先查询子集0,若没有冲突,则正确识别标签结束。若仍有冲突则再继续分裂,把子集0分成00和01两个子集,依次类推,直到识别出子集0中所有标签,再按此步骤查询子集1。
四叉树搜索的基本思想是将处于冲突的标签分成四个子集00、01、10和11,先查询子集00,若没有冲突,则正确识别标签结束。若仍有冲突则再继续分裂,依次类推,直到识别出子集00中所有标签,再按此步骤依次查询子集01、10、11。
2 改进防碰撞算法
ALOHA算法当标签达到一定数量的时候,容易发生某些标签多次碰撞无法识别的状况,也就是“标签饥饿”现象[8]。二进制树形转化法则不存在这一现象。目前已经存在的算法有动态二叉树搜索算法、动态的四叉树搜索算法、自适应的二四叉树防碰撞算法[9]。
二叉树搜索时,不存在空闲时隙,但是碰撞时隙的数量非常多;四叉树搜索时,可大幅度减少碰撞时隙,不过增加了空闲时隙的数量。自适应的二四叉树,引入碰撞因子的概念,根据当前集合碰撞因子的大小,自适应地选择采用搜索树的类型,从而大幅提高效率。
不过之前的文章由于考虑到引入八叉树系统设计算法更加复杂,因此没有对八叉树进行进一步的分析,而是仅分析二四叉树。当标签数目较多时,为进一步优化算法,文中提出一种自适应的二四八叉树算法,以进一步优化标签碰撞识别过程。
动态八四二叉树搜索流程如图1所示。
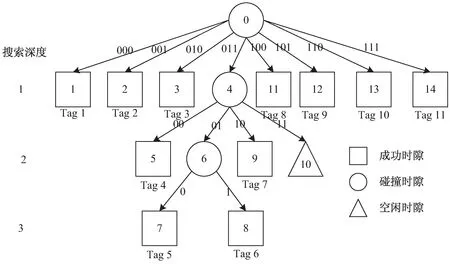
图1 动态八-四-二叉树搜索流程
通常来讲,当系统内的标签数量越多,则出现碰撞的位数也就越多,从而碰撞位占标签总比特位的比例也就越大。为了更好地决定采用几叉树进行搜索,定义了碰撞因子μ来计算这个比例,以便有效地利用碰撞信息,提高算法效率。
定义:假设每个标签的ID码长度为n比特,其中碰撞间隙内产生碰撞的比特位为nc,则
(1)
其中,碰撞因子μ包含了待识别的标签的数量的信息。
假设系统内有M个待识别的标签,每个标签的ID码长度为n比特,其中任意一位不发生碰撞的概率为(1/2)M-1,由此可得:
(2)
式2表明,系统中标签的个数越大,碰撞因子值越高;反之,碰撞因子值越低。由此说明碰撞因子的大小可以用来估计待识别标签的数量。
在文献[10]中给出了计算碰撞因子值的方法,即碰撞因子与叉树的关系。假设系统内有M个待识别的标签,自适应多叉树的叉数为L,当搜索的深度为1时,标签的识别概率为P(1)=(1-1/L)M-1;当搜索深度为2时,识别概率为P(2)=P(1)[1-P(1)];以此类推,当搜索的深度为k时,得到标签的识别概率为P(k)=P(1)[1-P(1)]k-1。
所以,需要搜索的深度均值为:
(3)
所需的平均时隙为:
(4)
根据计算可知,当L=M时,所需的平均时隙最少。理论上来讲,待识别的标签越多,多叉树的叉数越多,但实际上只考虑二叉树、四叉树和八叉树。
通过比较得知:当M<3时,T为T2;当3≤M≤5时,T为T4;当M>5,时,T为T8。其中,M=3为二叉树和四叉树的临界值,此时计算得μ=0.75;M=5为四叉树和八叉树的临界值,此时μ=0.937 5。因此得出,当μ<0.75时,选择使用二叉树搜索;当0.75≤μ≤0.937 5时,选择四叉树搜索;当μ>0.937 5时,选择使用八叉树搜索。
EIAMS算法流程如图2所示。
Step1:读写器初始化查询堆栈,发出查询命令。
Step2:与阅读器前缀相符合的标签响应。
Step3:若标签响应数为1,识别成功,为成功时隙;若无标签响应,识别失败,为失败时隙;若有多个标签响应,则进入碰撞时隙。
Step4:碰撞时隙:计算碰撞因子μ,若μ>0.937 5,采用八叉树,根据碰撞首位,重新确立八个查询代码,并进入栈记录;若0.75<μ<0.937 5,则采用四叉树,根据碰撞首位,重新确立四个标签查询,并进入栈记录;若μ<0.75,则采用四叉树,根据碰撞首位,重新确立八个标签查询,并进入栈记录。
Step5:判断栈,如果栈空,则结束,如果不为空,跳转到Step2。
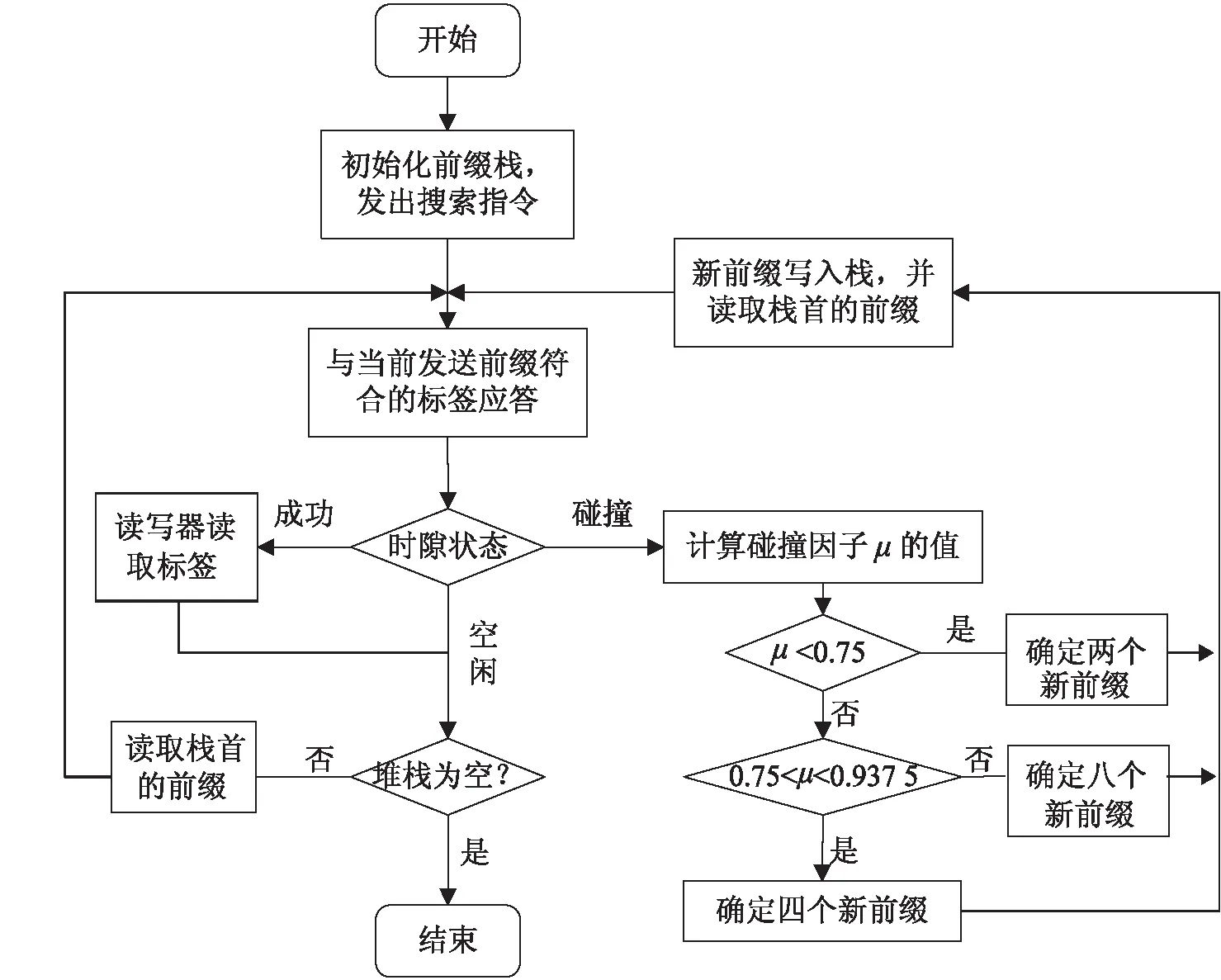
图2 EIAMS算法流程
3 算法性能分析
标签在识别过程中的时隙总数即为时间复杂度。假设待识别的标签数为n,在纯二叉树搜索算法中,总时隙数为2n-1[11];在纯四叉树搜索时,有如下推导的过程:
在纯四叉树中,叶子节点的度为0,记叶子节点个数为n0;其他节点的度为4,记其他节点的个数为n4;此总节点数为N,有:
N=n0+n4
(5)
除根节点,其他所有节点都有一个根,考虑根的个数为:
N=0×n0+4×n4+1
(6)
联立式1和式2可得:
n0=3×n4+1
(7)
由于n0=n+nk,nk为空闲时隙,因此
n+nk=3×n4+1
(8)
对于一个发生碰撞的时隙,其空闲时隙最大数量为2,最小数量为0。
当一个碰撞产生2个空闲时隙时,nk=2×n4,代入式8可得n=n4+1,时隙总数为N=n+nk+n4=4n-3;当一个碰撞不产生空闲时隙时,nk=0,代入式8可得n=3×n4+1,时隙总数N=n+n4=(4n-1)/3。
因此,在纯四叉树中识别的时隙总数取值范围为:[(4n-1)/3,4n-3]。
同理可得,在纯八叉树中识别的时隙总数取值范围为:[(8n-1)/7,8n-7][12]。
由此可见,改进后的算法与之前的算法相比,在时间复杂度上没有量的提高,在识别的时隙总数上有较为明显的减少。因此,改进算法近一步优化了RFID防碰撞算法。
在实际应用中,由于二叉树、四叉树、八叉树在搜索流程中所占比例不同,因此在总时隙处理上不能简单地进行平均,而是应该进行加权平均。采用平均方法与实际状况尽管会存在一定差距,不过在总体趋势上,基本是相同的。
4 实验仿真分析
根据上面的算法描述,采用MATLAB_R2017a对改进算法与之前常见的二叉树、四叉树、二四叉树等算法进行仿真对比分析。
仿真过程中,四种算法统一采用随机生成的16位RFID标签。对不同算法在标签总数从10到300以步长为10变化,每种算法重复进行1 000次进行仿真,记录下参数后最后取平均值。图3为四种算法所需要的总时隙数、吞吐率的比较。

图3 总时隙数变化仿真图
为了更好地衡量算法的优化程度,定义算法提升度的概念,根据时隙多少来衡量算法的优化程度,算法提升度公式为:

(9)
将二-四叉树算法与二四八叉树算法选择部分标签数量,列出算法提升度表格,如表1所示。
根据上述实验仿真结果可知,从总时隙上看,当标签在数量较少时,二四八叉树算法明显优于二四叉树;而当大于100时,二四八叉树却不如二四叉树,不过两种算法相差依然较小。根据算法提升度表格可以看出,随着标签数量的提高,与二四叉树相比改进后的算法提升度在降低。因此,改进后的算法更加适用于中小型系统[13]。
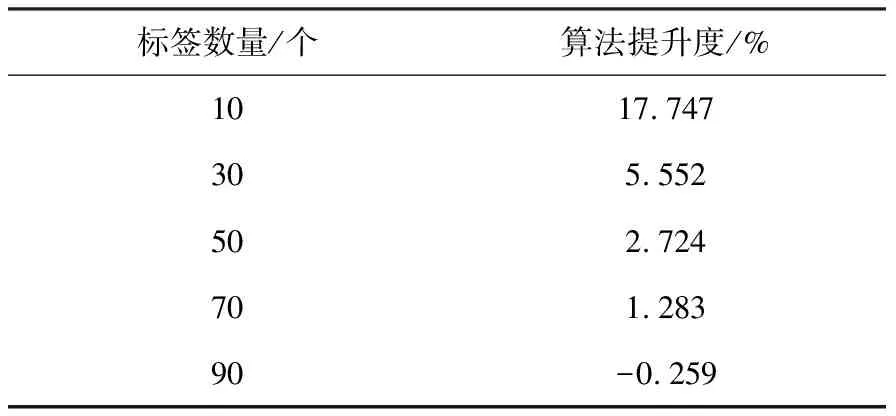
表1 算法提升度
吞吐率变化仿真如图4所示。
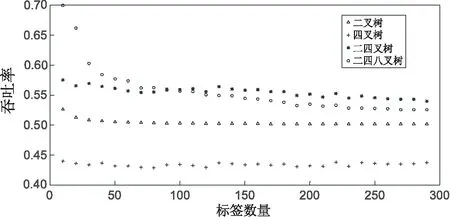
图4 吞吐率变化仿真图
从吞吐率看,当标签在100之内时,二四八叉树显然优于二四叉树,当标签大于100时,二四叉树优于二四八叉树。不过对比单一的二叉树和四叉树,二四八叉树无论在总时隙还是吞吐率上,都有明显的优化。
可见,在标签数目比较多,即碰撞率高时,引入八叉树反而会减弱算法。以4位标签为例,分析树形即可发现原因。当采用二四八叉树时,树第一层为八叉树,将前3位标签分开,由于标签长度总为偶数,这时必定会有1层需要用二叉树;如果采用二四叉树,第一层对应前两位,第二层对应后两位,总时隙数比改进后的算法反而要优化。
5 结 论
为解决射频识别过程中多个标签同时存在引发的碰撞问题,在自适应二四叉树防碰撞算法的基础上,将八叉树引入,提出了一种改进的自适应的二四八叉树算法。算法通过计算标签的碰撞因子,自适应地选择最优树的叉树,然后进行搜索,从而大大减少了空闲时隙。对改进算法进行复杂度分析后,发现改进算法的复杂度与标签数量近似呈线性关系。
针对不同标签数量的搜索过程,在总时隙数和吞吐率两个方面对算法进行仿真。结果表明:当标签数目较少时,采用二四八叉树相结合的算法优化效果十分明显,可以大幅度提高系统吞吐率;不过当标签数目较多时,二四八叉树在总时隙数上不如二四叉树。与单纯的二叉树或者四叉树相比,不论总时隙数多少,改进后算法都具有明显的提高。
在实际应用中,如果标签长度为奇数,或者标签中有奇数位数未使用,读卡器不需要识别。这时候采用二四八叉树将会有较优的结果。
6 结束语
提出了一种改进的自适应的二四八叉树算法,根据碰撞因子自适应选择搜索树的叉数,仿真结果表明,在标签一定的数量内,算法大幅度减少了总时隙,提高了吞吐率,不过超过一定数量算法性能会降低,适用于小型的射频识别系统。目前,算法仅仅研究了基于多叉树二进制防碰撞算法,今后可以在此基础上,着重研究多种防碰撞算法的混合使用。
猜你喜欢
电脑报(2022年37期)2022-09-28 05:31:07
枣庄学院学报(2022年5期)2022-09-21 09:35:22
现代计算机(2021年14期)2021-07-09 17:19:40
科技创新与应用(2017年35期)2017-12-19 08:33:36
智富时代(2017年6期)2017-07-05 16:37:15
武汉轻工大学学报(2016年4期)2017-01-16 08:53:03
建筑材料学报(2015年3期)2015-02-28 02:36:27
物联网技术(2014年8期)2014-08-27 16:30:01
河南科技(2014年24期)2014-02-27 14:20:01
机械设计与制造工程(2013年4期)2013-09-12 03:23:04