自适应滤波算法在板结构振动控制中的应用
2018-12-18 01:15胥馨尹宁少武
机械设计与制造 2018年12期
胥馨尹,宁少武
(1.中国工程物理研究院 总体工程研究所,四川 绵阳 621900;2.南京航空航天大学 航空宇航学院,江苏 南京 210016)
1 引言
结构振动主动控制是相对于传统被动控制来说的,它是汇集多门学科的综合研究。其研究对象是由受控对象和控制结构组成的闭环系统,即主动振动控制系统,它通过附加的振动与原振动相抵消从而消除结构的振动。主动控制具有振动环境适应性强,控制低频振动和声辐射的效果良好,因而成为当前振动控制发展中的热点,并在很多工程等领域得到了初步应用。
自适应滤波已广泛应用到结构振动控制中,文献[1]将窄带的自适应前馈控制系统用于削弱整体结构的振动。文献[2-3]将自适应算法用于控制宽带结构的振动,在飞机壁板的主动控制试验中降噪达到12dB,文献[4]采用自适应滤波技术主动控制薄板模型的振动。但以上主动控制主要集中在频域范围内,频域内结构的振动响应与结构固有频率和激励频率有关,这将影响振动控制的实际应用。而在时域内对振动响应进行振动控制为实时控制,更贴近工程实际且有利于控制策略的实施。并将递归最小二乘算法的快速算法(QRD-LSL)应用到有源振动控制系统中,降低系统计算量,提高递归最小二乘算法的振动控制性能。
2 振动控制分析
考察均匀材料等截面四边简支矩形薄板,在外激励源f(xf,yf,t)作用下,如果考虑阻尼,由振型函数 Wmn(x,y)的正交性,可得模态坐标q(t)表示的简支板受迫振动微分方程为:

在实际工程中,激扰形式比较复杂,而次级控制源的数目是有限的,往往要求使结构振动的总能量控制为最小,若考虑令结构动能最小,由上述方程可知时域内结构的振动速度响应V(x,y,t),并将速度响应关于时间离散,简化表示为脉冲响应矩阵的形式[5]:

式中:h(x,y,(t-τ))—速度脉冲响应矩阵。
由激励力在xe处产生的速度Vep和控制力产生的速度Vec叠加得到总速度为:

振动控制的目标为使板的动能减小,通过减小简支板上某点的速度来反应控制效果,这一控制效果点记为误差信号点(xe,ye)。
3 振动控制系统建模
3.1 自适应滤波控制算法
为实施振动控制策略,使结构在时域内动能得以减小,运用基于自适应滤波算法的前馈控制系统,分别采用两种不同自适应控制算法。首先采用滤波-X最小均方算法,其结构简单,收敛速度受参考信号自相关矩阵特征值的分布情况的影响,当特征值分布较广时,收敛速度就慢,因此该算法的适用范围较窄[6]。基于QR分解的最小二乘格型自适应滤波算法(QRD-LSL)是一种递归最小二乘算法的快速算法,依靠QR分解中酉旋转[7]。QRD-LSL滤波器结构和算法都很复杂,但运算特性良好,且易于实现。
设格型滤波器的阶数为M,基于QR分解的最小二乘格型自适应滤波(QRD-LSL)算法分为角度归一化前向预测、角度归一化后向预测和角度归一化联合过程估计三部分[8]。
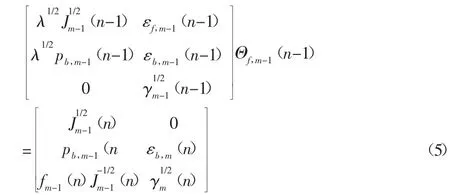
3.1.1 自适应前向预测
在不同时刻 n=1,2,…,阶数各为 m=1,2,…,M 时,最小二乘格型前向预测器阵列方程为:
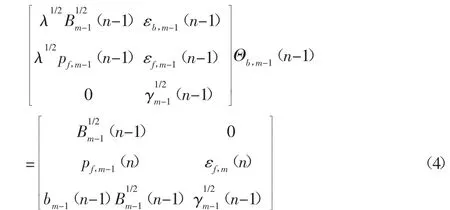
3.1 .2自适应后向预测阵列
在不同时刻 n=1,2,…,阶数各为 m=1,2,…,M 时,最小二乘格型后向预测器阵列方程为:
3.1 .3联合过程估计阵列
在不同时刻 n=1,2,…,阶数各为 m=1,2,…,M+1 时,联合过程估计阵列方程为:
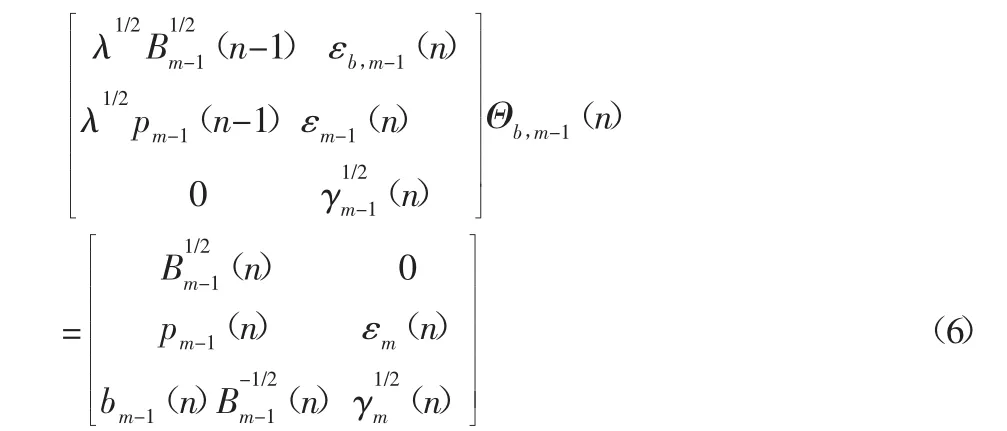
式中:Θb,m-1(n-1)、Θf,m-1(n)、Θb,m-1(n)—酉旋转矩阵。
如果主动振动控制系统的两个控制环节都采用QRD-LSL滤波器,系统会变得异常复杂。因此用QRD-LSL滤波算法来实现决定滤波器特性系数的更新,而采用格型联合过程估计器实现参考信号的滤波生成次级源信号。格型联合过程估计器的参数有前向反射系数 kf,m(n),后向反射系数 kb,m(n)和 hm-1(n)联合估计回归参数。
以上振动主动控制系统的两个部分,即QRD-LSL算法参数与格型联合过程估计器,Haykin证明它们有如下关系[9]:
式(4)中 pf,m-1(n)与 m 阶前向反射系数 kf,m(n)关系如下:
式(6)中 pm-1(n)与 m-1 阶的联合估计回归参数 hm-1(n)关系如下:

于是将QRD-LSL滤波器结构算法与格型联合过程估计器联系起来了。
3.2 自适应振动控制系统
整个控制系统,如图1所示。在简支板上(xp,yp)作用激励力fp,使板产生振动;把(xr,yr)处作为参考信号处,采集此处的速度Vr(t)作为格型联合过程估计器的输入;(xe,ye)为误差信号处,用来得到经主动控制后此处的速度,从而反应控制效果;在(xc,yc)处作用控制力fc,以抵消激励力产生的振动,利用自适应控制算法时时更新控制力fc的大小,使其达到更好的控制效果。
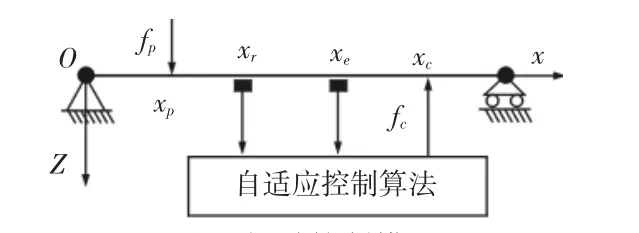
图1 振动控制模型Fig.1 Vibration Control Model

图2 基于QRD-LSL滤波算法的控制系统Fig.2 Control System based on QRD-LSL
利用QRD-LSL滤波算法进行有源振动控制系统,如图2所示。将其应用到简支板振动上,x(n)为参考信号,在板的控制中为参考信号处速度Vr(t)。将激励力fn在误差传感器xe处产生的速度作为期望信号d(n)。

其中,hw为滤波器的系数,由前一时刻参考信号处的速度和滤波器系数来更新当前时刻的控制力,从而对激励力产生的振动进行时时抵消。次级通路传递函数为hs=h˙ec,hˆs是次级通路hs的估计,这里假设hˆs=hs=h˙ec。
4 仿真计算分析
计算分析的模型为四边简支薄板,初级源和次级源均采用单点激励。板的物理参数,如表1所示。在所有仿真实验中,采样频率为128Hz,采样点数600。

表1 计算模型物理参数Tab.1 Parameters of Calculation Model
在仿真研究过程中分别使用两种不同的信源:
振动源 1:E force=sin400πt
振动源由单一正弦波构成。
振动源 2:E force=awgn(sin400πt,15)
振动源由一正弦波和信噪比为15的白噪声组成。
为验证振动的衰减水平,定义如下性能指标:

4.1 FxQRD-LSL算法中相关参数的影响
FxQRD-LSL算法的参数有滤波器阶数M和初始化值δ,这里采用的振动源1和2。选取初始化值δ为10000,考虑滤波器阶数的影响。对于振动源1阶数取为4,6,8,16,32。当振动源为单一正弦波时FxQRD-LSL算法不同阶数时振动衰减指标R,如图3所示。从图中可以看出当滤波器从4阶增加到6阶后振动衰减水平指标R明显降低,从6阶到8阶系统的振动控制效果也有所增强但不如从4阶增加到6阶那么明显。继续增加滤波器阶数,从16阶到32阶振动衰减水平指标R降低量很小。可以看出对于FxQRD-LSL算法,随着其滤波器阶数的增大振动控制效果越好,但增加到一定阶数,振动的控制效果不再明显,而滤波器阶数过大会导致系统的计算复杂度增加。因此太大或者太小都难以得到最佳的控制效果,为了的得到最佳的振动控制效果,应适当合理选取滤波器阶数。当振动源为加入白噪声的正弦波时FxQRD-LSL算法不同阶数的振动衰减指标R,如图4所示。从图中可以得出对于不同的振动源,滤波器阶数增加对控制效果的影响是一样的。对于FxQRD-LSL算法中的参数初始化值δ和遗忘因子在算法中不能轻易改变,否则会导致系统不稳定,控制发散的情况。

图 3 FxQRD-LSL算法不同阶数时振动衰减水平指标R(振动源1)Fig.3 Different Orders of Vibration Attenuation Index R(Vibration Source 1)
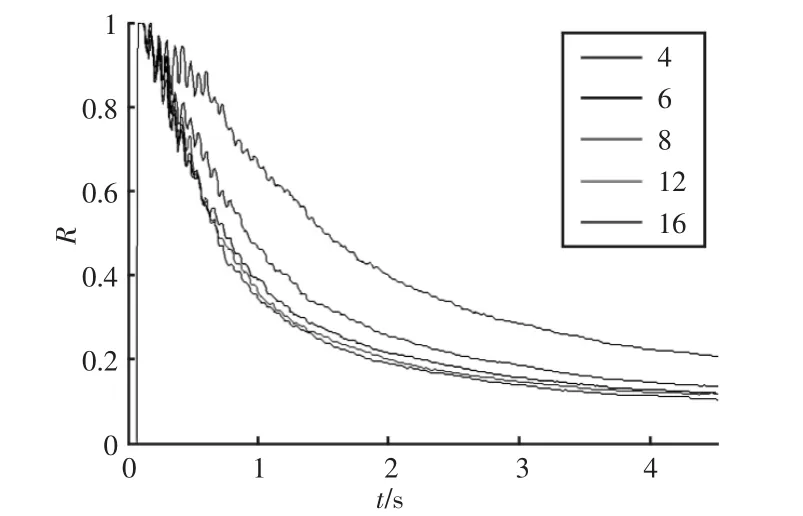
图4 FxQRD-LSL算法不同阶数时振动衰减水平指标R(振动源2)Fig.4 Different Orders of Vibration Attenuation Index R(Vibration Source 2)
4.2 不同算法的控制效果
对FxQRD-LSL算法和FxLMS算法的控制效果进行对比分析。两种算法中控制器相关参数的选取列表,如表2所示。

表2 控制滤波器阶数和步长因子等相关参数Tab.2 Control Filter Order and Step Size Factor.etc

图5 两种算法的残余振动速度对比(振动源1)Fig.5 Contrast with Residual Vibration Velocity(Vibration Source 1)
两种算法控制振动源一和二得到的残余振速对比,如图5、图6所示。两种算法控制振动源一和二得到的振动衰减水平指标对比,如图7、图8所示。从图5和6可以看出FxQRD-LSL算法振动控制能力更强,控制振动的衰减速度更快,衰减幅度更大,且FxQRD-LSL算法对单一振源的控制效果优于复合振源。从图7和8可以看出FxQRD-LSL算法与FxLMS算法相比它的振动衰减水平更快更多。FxQRD-LSL算法是FxRLS算法的的快速算法,它的复杂度与FxLMS算法相同都是阶的[10],M为自适应滤波器阶数,较FxRLS算法的M2阶有很大程度的提高,但计算量略大于FxLMS算法。综合以上几幅图及算法的复杂度,可以看出FxQRD-LSL算法振动控制能力更强,与FxLMS算法相比它有快的收敛速度和小的稳态误差,性能优于FxLMS算法。
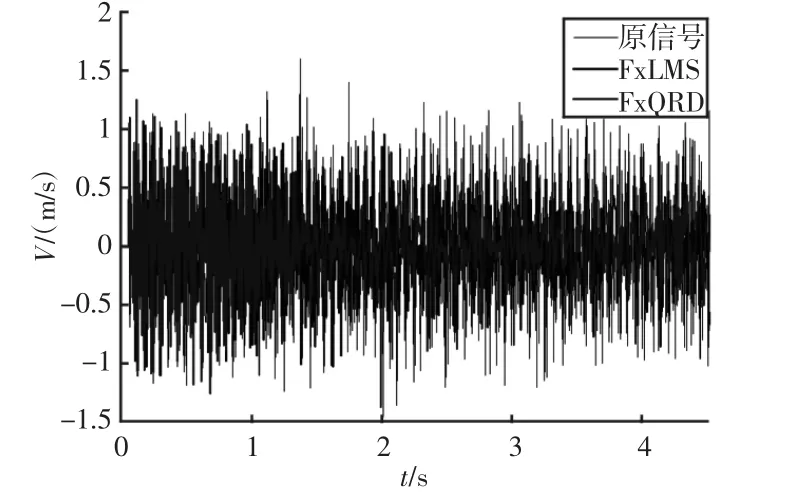
图6 两种算法的残余振动速度对比(振动源2)Fig.6 Contrast with Residual Vibration Velocity(Vibration Source 2)

图7 两种算法的振动衰减水平指标R对比(振动源1)Fig.7 Contrast with Vibration Attenuation Index R(Vibration Source 1)
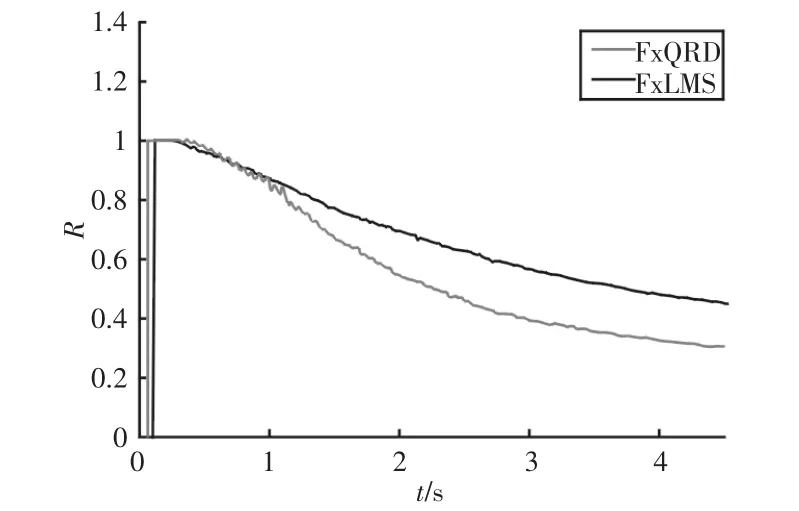
图8 两种算法的振动衰减水平指标R对比(振动源2)Fig.8 Contrast with Vibration Attenuation Index R(Vibration Source 2)
5 结论
在时域中分析零初始状态下激励引起的简支办的振动响应,采用QRD-LSL自适应滤波算法建立简支板振动主动控制模型。QRD-LSL算法是一种快速的最小二乘算法,具有最小二乘算法稳态误差小,收敛快的特性,且有近似为M阶的计算复杂度,因此该算法的计算效率很高。仿真结果表明,应选择适当的滤波器阶数而达到良好的振动控制效果,阶数过少,控制效果不佳,阶数太大,效果没有明显提高但计算量增加。当控制力作用位置接近激励力时,控制效果较好,控制力位置对控制效果影响很大,需进一步研究。与滤波-x最小均方算法对比表明,将格型联合过程估计器结构和QRD-LSL自适应滤波算法相结合建立的振动主动控制系统具有收敛速度快、稳态误差小、计算量较小等特点。
猜你喜欢
华东师范大学学报(自然科学版)(2021年3期)2021-06-03
陕西科技大学学报(2019年4期)2019-07-04
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
教育教学论坛(2018年39期)2018-09-25
电子制作(2018年1期)2018-04-04
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年2期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05