1 kVA高性能单相中频逆变电源的研制
2018-12-17 03:15:38何昕东石健将
电源学报 2018年6期
何昕东,汪 洋,石健将
(浙江大学电气工程学院,杭州 310027)
400 Hz中频逆变电源广泛应用于船舶、航空器等领域的电能变换,并对其功率密度、功率等级、效率及可靠性等指标提出了较高的要求。通常,中频逆变器的设计难度相对于工频逆变器更高[1],例如,需要更高的带宽,数字控制带来的延时影响更大。尤其是航空电源中的低压28 V输入/115 V输出的中频逆变电源,由于存在升压比较高、输入电流较大等问题,会出现例如稳定性变差以及功率密提升困难等问题,导致设计困难加大。因此,国内外有较多相关学者对中频逆变器开展了研究。文献[2]提出了两级结构的逆变电源,前级采用独立输出电压闭环并-串型 IPOS(input parallel and output series)结构的DC-DC变换器,后级采用T型三电平三相逆变器提高电源功率密度,但存在前级DC-DC变换器动态响应不够快的缺点,而且相对于单相来说没有直流侧二次纹波电流;对于IPOS结构的均功率和稳压控制,文献[3]使用单独电压环,使各模块共用相同占空比,具有控制简单的优点,但模块的差异性会导致功率不能均分;文献[4]提出了加入输出电压环和均压环的控制方法,功率均分效果好,但系统较为复杂,且总串联电压在负载扰动下的动态响应速度不够快;由于单相逆变器直流侧会产生二次纹波电流,为抑制其对前级的影响,应采用较大的中间电容[5];为了减小电容从而提高功率密度,文献[6]提出了DC-DC级控制采用改进型负载电流前馈方法,来抑制逆变器直流侧二次纹波电流对前级的影响,但并未考虑多模块级联的情况;文献[7]提出了直流微网中DC-DC级加入双带通滤波器对二次纹波电流的抑制方法,但没分析DC-DC级输出串联的情况;在逆变器控制方面,文献[8-11]对逆变器的模型进行了分析,并基于PR控制对电压电流环进行了设计,但没提出合理抑制输出电流影响的控制策略,负载扰动下的动态响应速度也不够快。
本文首先针对高功率密度低压输入中频变流器需求设计了电路拓扑结构,分析了需要考虑的问题;其次,在DC-DC变换器的控制中提出了单模块加入改进型负载电流前馈、另一模块加入电压补偿的控制方式,既能实现对单相逆变器直流二次纹波电流的抑制,又能获得较快的动态响应速度;然后,提出加入输出电压前馈将电压电流环解耦,采用改进型负载电流前馈的逆变器控制策略,通过对补偿控制器的合理设计实现理论上对负载电流扰动的有效抑制,提高逆变器对负载扰动的动态响应速度;最后,设计了样机的电气参数和控制参数,通过仿真和实验验证了上述设计的可行性和正确性。
1 功率电路拓扑设计
本文提出的变流器采用两级结构,其电路拓扑如图1所示,采用前级DC-DC变换器实现隔离和升压,相比通过后级中频变压器隔离升压的方法可以大大减小电源的体积,提高变功率密度。由于输入为低压大电流,如果仅仅采用一个DC-DC模块,开关管电流应力会比较大,因此前级选用了前并后串的移相全桥结构。这样设计的优点有:①降低开关管的电流应力;②减小滤波器和变压器的体积,提高电源的功率密度;③对于单个移相全桥来说,此结构由于变压器变比能够减小一半,使得相同漏感下移相全桥的占空比丢失能减小一半,大大提高了电源设计的可行性。前级输出两模块分别通过高频电容滤除开关纹波,串联后接电容用来吸收后级单相逆变器产生的二次电流纹波,便于对后续的二次电流纹波抑制控制的实现。后级采用了全桥逆变的电路结构,可以通过倍频调制三电平SPWM逆变输出所需的正弦波。
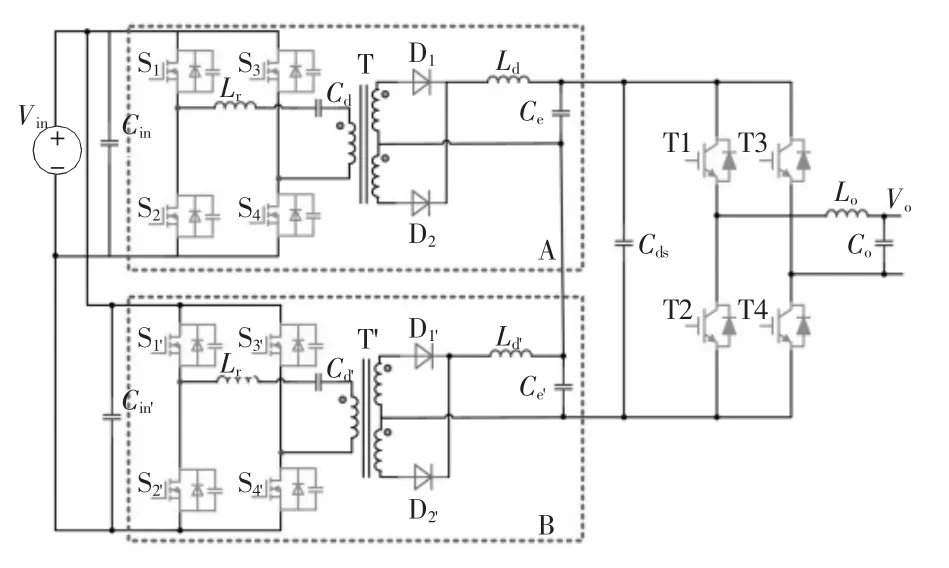
图1 变流器电路拓扑Fig.1 Circuit topology of converter
上述电源结构中,电气参数计算较常规,需要重点考虑的是移相全桥滞后臂软开关和占空比丢失的问题。如果输出滤波电感数值很大,忽略电感电流的纹波,在一个开关周期中将输出滤波电感等效为恒流源Io,则等效占空比丢失的表达式为

式中:Lr为漏感;fs为开关频率;Io为输出电流;n为原副边匝比;Vin为输入电压。
由此可知,当其他参数确定后,谐振电感Lr不宜取太大,否则会产生较大的占空比丢失。同时,为了使滞后臂能实现软开关,必须满足条件

式中:ILr为关断时漏感电流;Cds为MOS管的DS电容。
由此,为了使移相全桥在一定负载下能实现滞后臂软开关,谐振电感Lr不宜取太小。因此,实际设计Lr时要综合考虑对这两个问题的影响,折衷选择。
另外,由于后级是单相逆变器,直流母线会产生2倍基波频率的纹波电流,会影响前级的工作性能,因此需要加以抑制。加大中间级电容可以起到抑制效果,但由于体积限制,不宜取太大,所以本文在前级DC-DC控制中加入相应的算法进行改善。由于该变流器应用场合需要其具有更高的可靠性和具备更好的性能,因此本文在两级的控制策略中均加入了改进措施来提高动态响应速度。
2 控制系统设计
2.1 前级DC-DC变换器控制策略
前级DC-DC变换器控制框图如图2所示。由于后级单相逆变器直流侧会产生较大的二次纹波电流,如果流回至DC-DC变换器,会增大前级管子的电流应力和通态损耗,还会影响前级开关管软开关的实现,使开关损耗增加,降低变换器的效率。因此需要在前级中加入抑制二次纹波电流的控制策略。由于2个移相全桥输出串联后并联1个大电容吸收后级纹波,因此移相全桥本身的滤波电容阻抗很大,可以起电流抑制作用,且两移相全桥模块输出阻抗是串联关系,只要其中1个在二次频率下的输出阻抗很大,即可实现抑制效果。因此,对其中1个模块采用输出电流前馈的双环控制方式,并加入陷波器,以此来抑制二次纹波电流;另一个模块则仅需要1个单电压环,就可以减小系统复杂度,降低成本。

图2 前级DC-DC变换器控制框图Fig.2 Control block diagram of the pre-stage DC-DC converter
此外,本文采用如图2所示的主从控制方式实现两模块均功率,其中,A模块独立控制,B模块通过A模块进行补偿控制。相对两模块独立控制的方法,此种改进可以加快系统对负载变化的动态响应速度。
基于表1的电气参数对控制器进行设计,电流内环参考电流到电感电流的回路函数为

式中:Gi(s)为电流调节器;Gpwm为 PWM 占空比到输出电压直流增益;Ce为滤波电容;Ld为滤波电感。
电流调节器采用PI控制,设计电流内环截止频率为开关频率的1/10,具体参数设计为

可得补偿后电流环回路函数截止频率为15 kHz,相位裕量为93°。
电压外环参考电压到输出电压的开环传递函数为

电压调节器采用PI控制,考虑外环带宽应该低于内环,具体参数设计为

可得补偿后电压环回路函数截止频率为10 kHz,相位裕量为46°。
图3是前级DC-DC变换器的等效输出阻抗。其中Ze是模块A除了滤波电容的输出阻抗,Ce是模块A的滤波电容;Ze'是B模块除了滤波电容的输出阻抗,Ce'是B模块的滤波电容;Zp是前面两模块及滤波电容等效的输出阻抗;Cds是后级单相逆变器直流二次纹波电流的吸收电容。通过环路计算可以得到两模块的输出阻抗分别为
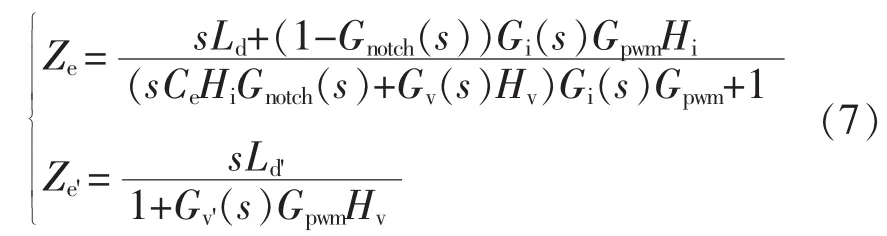
式中:Hi为电流环反馈系数,Hv为电压环反馈系数,而陷波器设计为

式中:ωn为特征角频率,取2倍输出电压基波角频率;Q为陷波器的品质因数,折中考虑陷波效果、频率适应性等,选取为0.5。
通过计算得到串联后的总输出阻抗Zp为

计算得到2fo处的值为5.37。相对于Cds来说,阻抗大于其10倍以上,即二次纹波电流大部分由Cds提供,理论验证了此控制方式能抑制住二次纹波电流的可行性。

图3 前级DC-DC变换器等效输出阻抗Fig.3 Equivalent diagram of the output impedance from the pre-stage DC-DC converter
2.2 后级中频逆变器控制策略
本文采用基于PR控制器的电压电流双环控制。由于逆变器滤波器本身模型会使输出电流影响到电感电流内环,为了使内环与外环解耦,在PWM调制波中引入了输出电压前馈。
相对于工频逆变器,中频逆变器如若需要获得相同的波形质量和响应速度,电流环截止频率理应按相应比例增大。但是由于开关频率为20 kHz,考虑对开关纹波的抑制,截止频率不宜取太大,本文取约为开关频率的1/10。
基于表1的电气参数对控制器进行设计,则电流内环回路函数为

式中:Giinv(s)为电流调节器;Gpwm为 PWM 占空比到输出电压直流增益;Lo为滤波电感。
考虑补偿后回路函数的截止频率,将电流内环准PR控制器设计为

计算得到补偿后电流内环截止频率为2.36 kHz,相位裕量为 82°。
电压环回路传递函数为
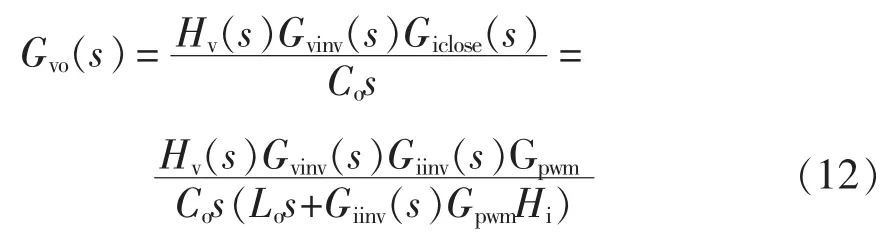
式中:Co为滤波电容;Gvinv(s)为电压调节器;Giclose(s)为电流内环闭环传递函数;Hv为电压环反馈系数;Hi为电流环反馈系数。
将电压外环准PR控制器设计为

计算得到补偿后电压内环截止频率为2.08 kHz,相位裕量为 41.32°。
传统的负载电流前馈可以抵消一部分io对输出电压的影响,但并不能完全解除。本文提出对输出电流经过控制器Gic后前馈的方法。由于电流闭环传递函数可以计算出来,则前馈控制器只要取电流环传递函数的倒数即可以实现对io的完全抑制,由此可得

由于存在微分环节,实际实现过程中可以加入1个高频极点进行补偿,这样改进型负载电流前馈控制可以大大提高逆变器输出电压的负载调整率,使系统动态性能提升。
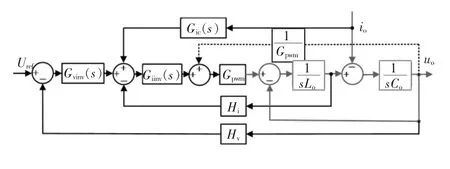
图4 改进型逆变器控制框图Fig.4 Control block diagram of improved inverter
3 仿真与实验
为了验证设计结构及控制策略的可行性,利用仿真软件PSIM搭建了仿真模型,并设计了额定输入功率1 kVA的样机。仿真及实验的电气参数及选取的器件型号见表1。
首先,在其他参数一致的情况下,仿真和实验对比了单模块加入陷波器和不加入陷波器的负载电流前馈下的电容前电流波形,验证单模块加入陷波器来抑制二次纹波电流方法的有效性;其次,仿真和实验对比了文献[2]中的独立控制和本文提出的主从控制下加载后,直流母线电压的动态响应波形,验证主从控制能改善输出电压动态响应的有效性;最后,仿真和实验对比了逆变器控制中加入改进型负载电流前馈后和文献[2]中未加入电流前馈的输出电压切载波形,验证了逆变器控制策略提升系统动态性能的可行性。
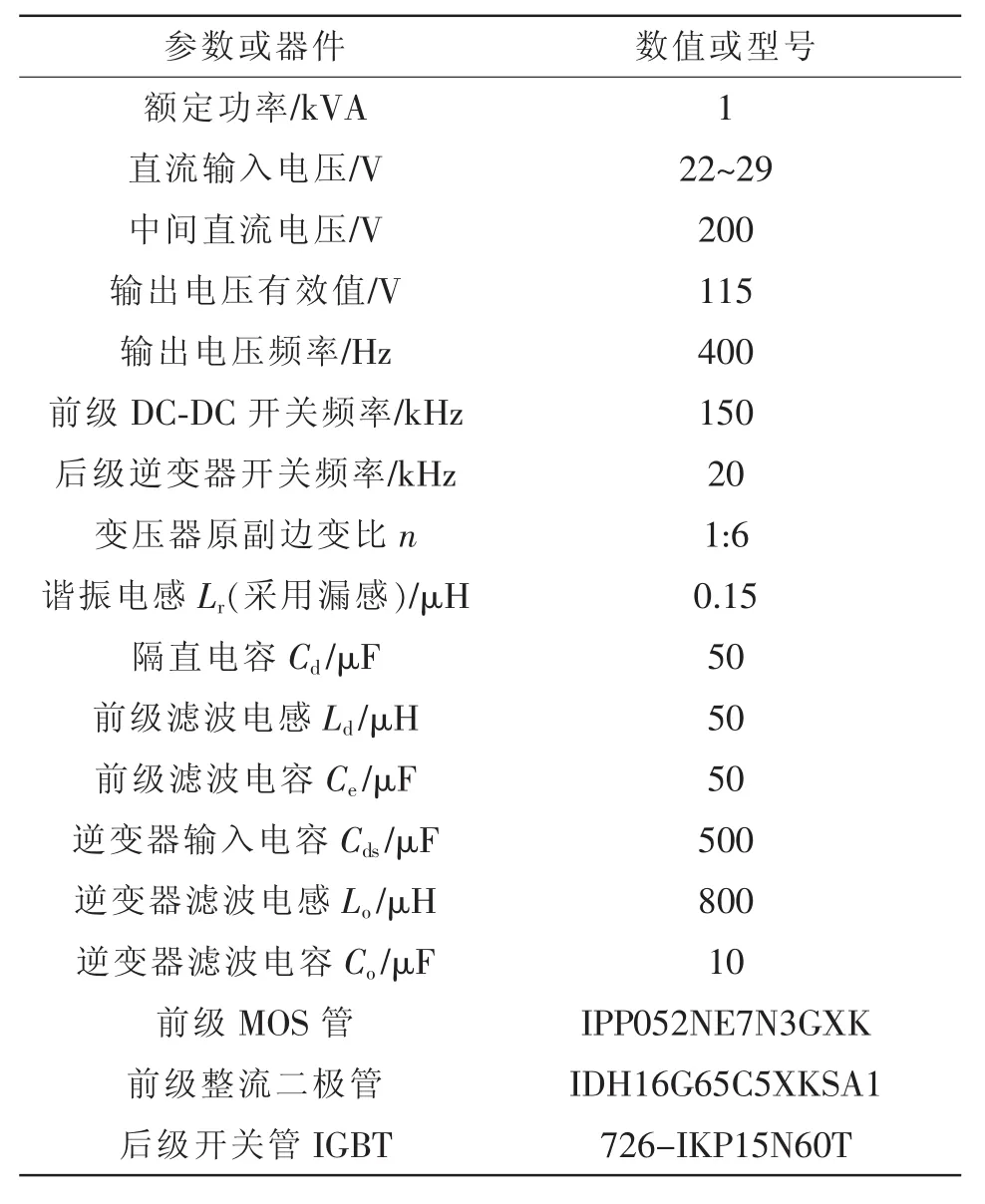
表1 变流器样机电气参数及器件型号Tab.1 Electrical parameters and device types of converter prototype
3.1 仿真验证
前级DC-DC变换器仿真波形如图5所示。图5(a)是模块A加入二次纹波电流抑制前后Zp流出的电流仿真波形。可以看出,加入抑制控制前电流Izpo纹波接近9.5 A,通过加入抑制控制后纹波减小到1.2 A,验证了仅由单模块加入带陷波器的负载电流前馈抑制单相逆变器直流侧的二次纹波电流的可行性。
图5(b)是模块B加入主从控制策略前后在0.05 s由空载切满载的直流母线电压仿真波形。可以看出,加入补偿后的电压Uds比未加补偿的电压Uds_pre动态响应速度快,电压跌落低,验证了耦合补偿可以提高系统动态响应速度的正确性。
图6是0.05 s时逆变器部分加入负载电流前馈前后由空载切满载的输出电压仿真波形。由图可以看出,未加改进型负载电流前馈的电压Uo_pre在切载后有3个周期的调整时间,动态响应速度较慢;加入负载电流前馈后,电压Uo基本没有变化,动态响应速度很快。由此验证了控制算法中引入负载电流通过补偿环节前馈来抑制负载扰动对输出电压影响的有效性。

图5 前级DC-DC变换器仿真波形Fig.5 Simulation waveforms of pre-stage DC-DC converter
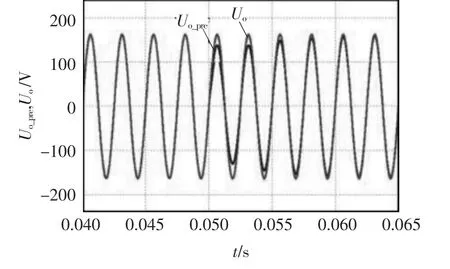
图6 加入输出电流补偿前馈前后的输出电压Fig.6 Simulation waveform of output voltage before and after adding output current compensation feedforward
3.2 实验验证
前级DC-DC变换器实验波形如图7所示。由图7(a)可见,实验结果和仿真基本一致,加入抑制环后能将二次纹波电流抑制到原来的1/5,验证了单台加入电流抑制控制策略的可行性;图7(b)是加入主从控制和两台独立控制的中间电压切载波

图7 前级DC-DC变换器实验波形Fig.7 Experimental waveforms of pre-stage DC-DC converter
4 结语
本文提出了一种用于航空领域的高性能低压直流输入中频逆变器的两级结构拓扑,对前级二次纹波电流抑制的控制策略进行了设计,并加入主从控制的稳压和均压算法改善前级动态响应速度。然后提出了后级逆变器的改进型负载电流前馈的控制策略,以提高逆变器输出电压动态响应速度。仿真和实验均验证了整体拓扑结构和控制策略设计形,可以看出加入耦合补偿后DC-DC变换器的动态响应速度提高,电压跌落减小,与仿真结果相符。
后级逆变器实验波形如图8所示。图8(a)是逆变器空载输出的傅里叶分析,可以看出实验输出的稳态电压波形THD小于3%,电压波形质量较高;图8(b)是加入补偿负载电流前馈前后的逆变器切载输出电压实验波形,可以看出加入补偿前输出电压有比较低的跌落,通过多个周期的调整恢复,而加入补偿后波形基本没有变化,与仿真相符,验证了此控制策略的可行性。的可行性和有效性。

图8 后级逆变器实验波形Fig.8 Experimental waveforms of post-stage inverter
猜你喜欢
电子设计工程(2022年15期)2022-08-17 10:07:16
光通信研究(2020年2期)2020-06-15 07:42:58
科技创新与应用(2019年17期)2019-06-09 08:38:29
光源与照明(2019年4期)2019-05-20 09:18:18
家庭影院技术(2018年11期)2019-01-21 02:20:38
家庭影院技术(2018年11期)2019-01-21 02:20:36
家庭影院技术(2018年8期)2018-08-21 12:09:16
电镀与环保(2016年3期)2017-01-20 08:15:32
电子器件(2015年5期)2015-12-29 08:43:41
电源技术(2015年1期)2015-08-22 11:16:26