
自感应式飞艇囊体静电测试控制器设计
2018-12-15 07:05:44彭平
电子设计工程 2018年23期
彭平
(中国特种飞行器研究所湖北荆门448035)
飞艇是利用充氦气来提供升力的浮空飞行器,其相对于飞机来说,具有滞空时间长、效费比极高这两个显著的优点。因此,近年来顺应军事应用的需求,飞艇作为一种高空侦查、通信中继、环境监测、城市安全监控、预警等平台,迅速引起了美国、欧洲、日本及韩国等众多国家的高度重视和发展。然而,由于飞艇囊体材料对抗拉伸断裂强力、面密度和氦气透气量等特性都有较高的要求[1-2],目前尚无单一材料可以全面满足这些要求。因此,现阶段飞艇囊体一般采用复合材料,而合成的复合材料大多电导率很小,产生的静电很容易积累,而静电是同性束缚电荷的积累,当静电积累到一定程度时,在电场的作用下,这些静电区域附近沿电场方向的空气会发生击穿,造成短时间的局部高压放电[3],干扰飞艇艇载电子电气设备,损害电子设备或器件等。在飞艇外场飞行试验过程中,对于积累在飞艇囊体表面上的静电目前没有有效的检测措施,而长期积累的静电放电会给飞艇的安全飞行构成安全隐患。为了能够有效及时地监测飞艇囊体表面静电积累及分布情况,防止静电积累,必须要对囊体表面的静电特性进行检测,了解飞艇囊体表面静电的累积情况,分析静电在囊体上分布特性以评价静电的危险程度,为高空大型飞艇囊体表面静电防护提供可靠试验依据。
1 系统总体设计
测试控制器由STC89C52单片机、电容式静电传感器、信号放大电路和滤波电路组成。当静电传感器感应到囊体表面上的静电时,静电传感器将感应出同频率的直流反馈信号输出,通过信号放大电路将信号放大后滤波,最后通过单片机内的逻辑判断程序进行比较判断,解算、排序、打包后通过艇载无线数传电台传回地面,其设计原理如图1所示。

图1 设计原理框图
2 硬件设计
2.1 STC89C52单片机
测试控制器选用单片机作为控制芯片,采用STC89C52单片机[4]结合外界辅助电路构成。该单片机是32位的ARM Cortex—M3内核,稳定工作频率可达72 MHz,拥有从64 kB到128 kB的闪存可选程序存储器,20 kB的SRAM,2个12位模数转换器,是一个低功耗高性8位单片机,结合8位微处理器和Flash存储技术构成功能强大单片微处理器,完全满足系统设计的需求。在本设计中,在单片机XTAL1(19脚)和XTAL2(18脚)引脚上接上石英晶体构成时钟脉冲信号的自激振荡器。
2.2 静电传感器
静电传感器一般由传感器电极、绝缘管以及电磁屏蔽罩三部分组成,其原理是通过改变置于静电场中的平板电容值来引起极板上电荷的变化从而产生微弱电流,再利用放大电路对此电流放大。当静电传感器检测电极检测到飞艇囊体表面带电颗粒时,由于静电感应,在静电电极内外表面将产生大小相等、符号相反的电荷,因此,静电传感器可以用电路等效静电传感器敏感元件[5-6],等效电路如图2所示。

图2 静电传感器等效电路图
从传感器等效电路可以得到,静电传感器的输出信号是其对地电容上的感应电荷[7-8],并在其上建立电压,信号极其微弱,但其泄漏电阻却较大,所以,静电传感器具有泄漏电阻大、电荷信号微弱的特点。
2.3 前置放大电路设计
由于静电传感器工作由平板电容的振荡极感应输出约为10-9数量级的低频微弱静电电流信号(频谱范围0~1.5 kHz之间),在静电监测过程中,依据静电传感器的采集原理,如果静电传感器采集的信号有少量电荷泄漏掉,将会对测试结果造成很大的测量误差[9-10],无法准确的定位飞艇囊体静电的积累情况。因此,文中将采用双运放LF324AD组成的具有高精度、高增益、高输入阻抗、高共模抑制比和低温漂等特点的两级前置放大电路[11],将放置放大电路放置在静电传感器内部,以对静电传感器信号源起到阻抗匹配和初步的电荷放大功能,如图3所示。

图3 前置放大电路
2.4 信号分档放大电路设计
静电信号为微弱电流信号,静电传感器采集信号时的量化误差较大,从而降低信号采集的精度,影响测量结果。为了提高测量的准确度,微弱信号经前置放大电路放大后,需再经一级分档放大,分档放大后输出正负交替的方波信号。方波信号经移相整流后送至A/D端供使用[12-13]。图4为分档放大电路。

图4 信号分档放大电路
2.5 滤波电路
静电传感器所采集到飞艇囊体表面的静电信号经过放大电路以后认为mV级信号,外界环境及艇上电子电气设备的噪声对静电信号影响非常明显。因此,设计滤波电路对静电信号进行滤波处理。使用MCP6021T-E/OT组成有源低通滤波电路,对信号源进行滤波和电荷放大功能[14-15],如图5所示。

图5 滤波电路
2.6 A/D转换电路
将微弱信号经过放大、整流、滤波后变为直流信号,然后通过A/D转换,最后输入单片机进行处理。本系统选用AD574A转换芯片,如图6所示。
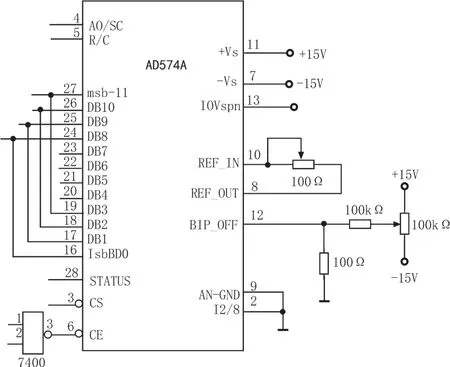
图6 AD574A
该转换芯片转换时间为25 us,线性误差为±1/2LSB,内部具有时钟脉冲源和基准电压源。该模块采用单极性对模拟信号进行转换,其高8位数据线接单片机数据线,低4位数据线接单片机的低4位数据线,其信号要求无论是单片机对其启动控制还是对转换结果的读取都应为高电平有效,单片机对转换结果的读取采用查询方式。
3 软件设计
静电传感器输出信号经过放大、整流和滤波后传送给单片机,其信号的正负判别、A/D转换、误差修正及数据传输等功能均由单片机软件来实现。
3.1 数据通信
静电控制器与地面站之间的通信采用数传电台模块,数据波特率9 600,地面站数传电台模块经过芯片转换为USB接口与地面站计算机连接。单片机发送的数据存储早TEMP中,数据每发送一次后TEMP自动加1,然后延时1 s在进行下一次发送。
3.2 软件流程
软件采用C语言模块程序设计技术,包括主程序、数据采集、数据处理和数据发送。单片机上电后完成系统初始化,包括设置波特率为9 600 bps,定时器T工作方式,RS232串行口工作方式,开中断,进行数据采集,A/D转换、数据求平均,数据转换,将转换后的数据存入缓冲区,等待发送。其程序流程图如图7、图8所示。

图7 程序控制流程
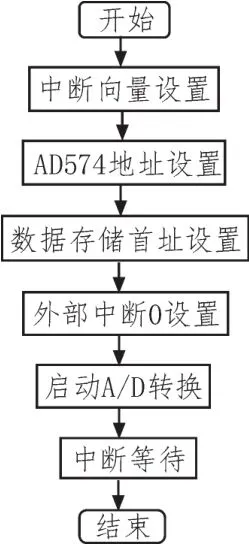
图8 A/D程序流程
4 试验与分析
4.1 静电监测试验
由于飞艇在实际飞行过程中遇到的情况比较复杂,采用随艇飞行监测的数据准确度不容易采集及控制。因此,采用在飞艇飞行结束以后在实验室内对飞艇囊体表面静电进行监测,根据飞艇囊体表面结构的特点在飞艇囊体表面选取A、B、C、D、E、F、G等7个作为静电采集监测点,如图9所示。

图9 飞艇表面静电监测点分布图
通过使用静电监测器长期,多角度对飞艇囊体表面的静电进行监控,采集系列静电数据后进行分析,准确掌握飞艇在试验飞行过程或在地面长期锚泊过程中飞艇囊体表面静电积累的部位及分布规律,分析静电积累特性及静电放电对艇载设备的影响。
4.2 测试数据和误差分析
本试验有效测量选取200~10 000 V,这就要求放大电路和A/D工作在30倍宽的范围内,势必降低准确度,尤其是低端的量化误差会很大,试验数据误差主要来源于以下几个方面:
1)静电测量采用非接触性传感器,当距离改变时传感器的输出明显改变,因而保证传感器与被测物体之间的准确定位是减少测量误差的有效手段;
2)传感器振梁振幅的波动将引入较大的误差,这一点可通过传感器的良好设计和加工改善;
3)静电传感器的非线性特征产生的误差。
4)传感器输出经微弱信号放大也会产生误差,数据经A/D转换为8位,引入一定的量化误差。
5)在囊体表面设置固定探头的支架,而且探头到囊体表面的距离也会随着囊体内气压的变化而改变,给测量的数据引入不确定的误差。
根据飞艇飞行后对囊体表面静电的试验实测数据统计与分析,结合所有因素造成总的误差进行分析,对所采集到的飞艇囊体静电数据进行曲线拟合[16],拟合后的误差如表1所示,获得了较高的测量准确度。

表1 测试数据与误差
5 结论
文中提出了一种基于单片机自感应式飞艇表面静电测试控制器设计方法,该设计由单片机、电容式静电传感器,信号放大电路、信号分档放大电路和信号滤波电路组成。分析静电放电对飞艇艇载设备的干扰和破坏以及由于静电产生的严重后果。通过对囊体表面的静电特性进行检测,掌握飞艇在飞行或长期地面锚泊过程中囊体表面静电积累的部位及分布规律,为高空大型飞艇囊体表面静电防护提供可靠试验依据。试验结果表明,该设计具有测试精度高,实用性强等特点。
猜你喜欢
海洋科学(2022年5期)2022-06-22 03:04:28
小哥白尼(趣味科学)(2022年2期)2022-05-25 13:20:58
现代防御技术(2021年6期)2022-01-06 13:15:38
纺织科技进展(2019年12期)2019-12-26 03:27:08
科学大众·小诺贝尔(2016年11期)2017-01-10 21:02:35
创新作文(小学版)(2016年16期)2016-11-11 05:47:47
太空探索(2016年12期)2016-07-18 11:13:43
百科探秘·航空航天(2015年12期)2015-11-07 07:05:51
百科探秘·航空航天(2015年11期)2015-11-07 07:05:30
百科探秘·航空航天(2015年10期)2015-11-07 07:05:09
