广域控制系统通信环节影响分析研究
2018-12-14 08:38时伯年王玉亭
东北电力大学学报 2018年6期
时伯年,王玉亭,李 炜,孙 刚
(1.北京四方继保自动化股份有限公司,北京 100085;2.国网甘肃省电力公司,甘肃 兰州 730050)
电力系统稳定水平作为电力系统在正常运行条件下能够保持其运行状态、当受到扰动之后能够恢复或者到达另一个平衡的运行状态的能力,一直以来是限制区域互联电网区域之间输电能力的重要影响因素.安全稳定控制系统则通过采取防止电力系统稳定破坏、制止系统失步运行、限制系统频率过低/高、限制系统电压过低/高、限制设备过负荷等措施有效地提高电力系统安全稳定性、防范电网稳定事故、防止发生大面积停电事故[1].
随着智能电网技术的不断发展和电网互联规模的不断扩大,电力系统安全稳定控制系统向着广域化、复杂化的趋势逐步演变[2~3].为了支持实时广域安全稳定控制系统,需要建设与安全稳定系统紧密耦合的通信基础设施[4].然而,当前已有的通信体系在支撑广域实时的安全稳定控制系统应用时存在一定的不足,因此,迫切需要新的安全稳定控制专网通信架构来承载广域安全稳定控制的复杂功能.
本文首先介绍了当前广域安全稳定控制系统配套通信系统的现状以及所面临的挑战.接着分析了通信系统故障对广域控制系统的影响,并结合实际电网的的两类广域控制功能论证了对高性能通信环节的需求.最后介绍了一种新的正在研究的安全稳定控制专用网络的系统结构,对未来复杂互联大电网安全稳定控制研究方向进行了初步探索.
1 安全稳定控制通信现状及挑战
能量管理系统(EMS)、广域测量系统(WAMS)和稳控系统等各类实现电网运行监测与控制的系统构成了电力系统安全稳定运行的主要保障措施.随着智能电网的不断发展,电力系统的安全稳定运行已经高度耦合于电力系统通信的基础设施,相互之间存在各种直接或间接的关联.由于通信系统方面的故障,往往会影响安全稳定控制系统的正常运行,并可能导致更为严重的连锁故障反应.因此,构建坚强的具有高可靠性的安全稳定控制通信网络,是实现电力系统实时广域安全稳定控制的重要基础和前提.
到目前为止,为了支撑EMS、WAMS、稳定等各类监测与控制系统应用功能,国内外电力系统已经建设了相对完善的通信网络体系.以安稳系统为例,该类系统通常由一个控制主站、若干个控制子站和若干个执行站组成,各站之间用通道相连,相互交换系统运行信息,传递控制命令.通信通道应优先采用2 M带宽,接口采用G.703 2 M接口.主站、子站和执行站之间采用1条独立专线通道,每条通道开通SDH网络自愈功能.此外,主站、子站和执行站之间的全程专线通道的传输电路时延通常要求≤30 ms.
随着智能电网技术的不断发展和电网互联规模的不断扩大,安全稳定控制系统逐步发展为跨区域的联合安全稳定控制,面对复杂大电网对安全稳定控制系统的实时性和广域性的要求,安全稳定控制通信开始面临新的挑战.
(1)受限于安全稳定控制系统对信息传输的高可靠性和高速性,目前国内外的安全稳定控制系统通信通道大部分都采用点对点的专用通道,用于稳定控制的信息通信系统从未形成过网络;
(2)现有PMU装置与稳控装置各自相对独立,彼此之间为信息孤岛,不能进行数据共享,也缺乏高速实时的网络互联.
综上,新的电网发展形势下实时广域安全稳定控制需要一套新的通信架构,以适应信息共享、实时性强、可靠性高的未来复杂互联大电网安全稳定控制通信需求.
2 通信对广域控制保护系统性能影响的理论分析
通信系统对电力系统产生影响的异常行为主要包括通信中断、通信误码和通信延时3种情况[5].如图1所示,通信中断可能造成装置(如继电保护装置)退出运行而导致电力一次设备的陪停,而通信的中断、误码和延时均有可能造成电力二次系统的装置(如继电保护装置或稳定控制装置)发生拒动、控制策略错误、延时动作和策略偏差等异常行为.电力二次系统的装置拒动或延时动作会对电力系统稳定产生相当于欠控的影响,而控制策略错误和偏策略差对电力一次系统的影响则可能是误控,也可能是过控或欠控.
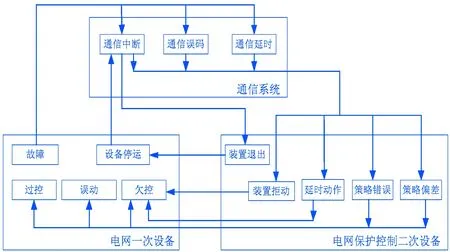
图1 电网一次设备、二次设备与通信系统的交互影响
由于电力二次设备通常会对所接收到的数据进行校验,当发现接收的数据有误码时,会将整个接收的数据包丢弃,因此通信误码也可以等效为通信的延时;而通信中断可以看作无穷大的延时.因而,通信中断、误码和延时等通信故障都可以等效为时间不等的通信延时[6].下面通过图2简单分析通信延时对电力系统稳定控制的影响.
如图2所示,通信系统异常行为引起的延时一方面会造成上送主站的电网实时信息对应的断面数据的时刻不一致,另一方面会造成在线控制策略下发到各执行站的延时,引起对电力系统采取相关措施的延误,这两方面都会对电力系统的稳定运行造成极大的影响.
3 示例分析
3.1 示例电网情况简介
以某通过多条直流线路实现大容量功率输送的实际电网为例,该电网包含4条实现区域间送电的主要直流线路,其中直流A为±500 kV的双回四极常规直流,额定有功功率4*1 600 MW=6 400 MW;直流B为±800 kV的双极常规直流,额定有功功率2*2 500 MW=5 000 MW;直流C为±800 kV的双极常规直流,额定有功功率2*2 500 MW=5 000 MW;直流D为柔性直流与常规直流各一回,额定电压320 kV,额定有功功率2 000 MW;四条直流在整流侧都具有了直流频率限制器和功率提升/回降功能,直流频率限制器死区为0.1 Hz.直流A配套机组A1水电厂9台机,装机容量为9*770=6 930 MW;直流B配套机组B1水电厂4台机,装机容量为4*600=2 400 MW,B2水电厂6台机,装机容量为6*700=4 200 MW;直流C配套机组C1水电厂9台机,装机容量为9*650 MW=5 850 MW;送端电网侧火电机组模型,总装机容量为12*600 MW=7 200 MW.火电机组和水电机组的频率死区设置为0.15 Hz.
3.2 通道中断对针对直流闭锁故障的紧急协调控制的影响
由于直流系统具有快速性及可控性,并具有短时或持续的过负荷能力,当示例电网处于孤岛运行状态时,若发生直流闭锁故障,可通过发挥其他非故障直流的过负荷能力,通过直流功率提升的方式将送端多余功率送至受端功率缺额地区,可缓解送端及受端系统功率不平衡,对解决系统的频率及电压问题将起到积极作用.根据送端电网出现的功率不平衡严重情况,需要使用直流协调控制手段与现有稳控措施的配合策略.
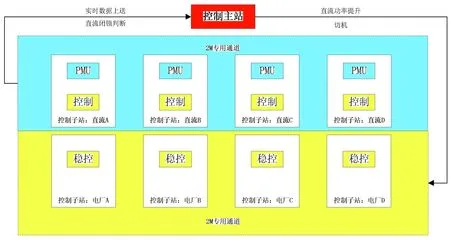
图3 针对直流闭锁故障的紧急协调控制系统结构图
针对直流闭锁故障的紧急协调控制系统结构,如图3所示.包括控制主站、控制子站以及由2 M专用通道组成的通信系统.控制子站包括同步相量测量单元PMU和安全稳定控制装置,分布于各直流换流站及直流配套电厂,进行同步相量测量和执行控制命令.控制主站通过2 M专用通道获取各控制子站上传的实时数据,进行故障判断和协调控制的决策,并通过2 M专用通道对需要控制的子站下发控制命令.
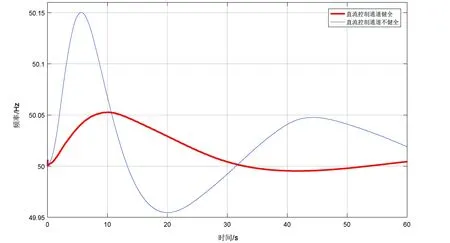
图4 全部通道正常与出现单条通道异 常中断下的控制效果对比
当直流A发生单极闭锁故障时的控制措施,此时对应送端过剩功率为25 00 MW,需采取的控制措施为直流A非故障极提升500 MW+直流B提升1 280 MW+直流C提升420 MW+直流D提升300 MW,电网最高频率为50.05 Hz,最终稳态频率为50.01 Hz,此时电网频率如图4中的红色曲线所示.
相同运行方式下,当直流A发生单极闭锁故障,且控制主站与直流B之间的通信通道发生异常中断,此时需采取的控制措施为直流A非故障极提升500 MW+直流C提升500 MW+直流D提升500 MW+切除小湾1台机组700 MW,电网最高频率为50.15 Hz,最终稳态频率为50.03 Hz,此时电网频率如图4中的蓝色曲线所示.
对比上述通道正常与出现单条通道异常中断下的控制结果,由于控制量决策合理,最终频率基本都得到了很好的恢复,但在单条通道异常中断情况,直流B的功率提升能力不能得到发挥,从而增加了切机控制量,相较通道正常时只需直流功率紧急提升的控制措施而言,增加了控制代价.
3.3 通道延时对广域阻尼控制的影响
区域间低频振荡风险常常成为制约区域输电能力的瓶颈.区域间振荡模式参与的机组多、涉及的范围广,影响面大,对电网的安全稳定有很大威胁,特别是对多组耦合紧密的发电机群通过弱联络线相连的交直流混联系统,区间振荡发生的可能性大大增强.示例电网在与主网联网运行状态中曾多次出现低频振荡事件.对于电网建设过程中局部地区网架结构本身存在的动态稳定性差的问题,并随着主网交直流运行和西电东送规模的逐步加大,低频振荡对整个电网的安全稳定运行潜在的危险更为突出.因此在运行中对低频振荡的产生进行广域的实时监测与控制具有十分重要的意义.
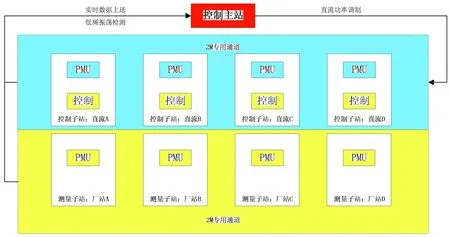
图5 广域低频振荡协调控制系统结构图
广域低频振荡阻尼控制系统结构,如图5所示.包括控制主站、控制子站、测量子站以及由2M专用通道组成的通信系统.控制子站包括同步相量测量单元PMU和安全稳定控制装置,分布于各直流换流站,进行同步相量测量和执行控制命令.测量子站包括同步相量测量单元PMU,分布于能够反映区间振荡模式的关键厂站,进行同步相量测量.控制主站通过2 M专用通道获取各子站上传的实时数据,进行振荡检测判断和协调控制的决策,并通过2 M专用通道对需要控制的子站下发控制命令.
如第2节所分析,通信系统异常行为引起的延时会对电力系统的稳定运行造成极大的影响,在广域闭环控制中同样存在不可忽略的网络延时,这里对其影响进行仿真分析.
延时对系统稳定性的影响主要体现在三个方面:对阻尼效果的影响、延时引起的高频振荡和延时不均匀引起的输出波形畸变[7].具体来说:(1)延时会在低频振荡的频率范围内导致不同的相移,该相移会附加到控制回路的频率响应中,因此会影响到直流调制的阻尼效果;(2)具有一定相位裕度的闭环稳定系统,由于延时的存在,有可能在幅值穿越频率上延时引起的相位滞后要大于系统本身的相位裕度,引起系统的不稳定,导致高频振荡现象的发生;(3)延时的不均匀会使控制输出量之间的间隔不均匀,从而导致输出波形的微小畸变.
以时延产生的高频振荡现象为例,如图6所示.当控制器的增益加大时,系统的相位裕度变小,当在幅值穿越频率延时引起的相位滞后要大于系统本身的相位裕度时,系统出现高频振荡,振荡频率约为5 Hz.通过在控制器中增加滤波环节可以适当削弱高频振荡成分,滤波器的效果在图6中也有所体现.
4 新一代电力系统控制保护专用通信网络架构
在如图3和图5所示的实际现场应用的两类相对独立的控制系统中,由于组成广域控制系统的装置之间均通过2 M专用通道进行信息传递,当发生严重电网故障时,若关键通信元件故障,可能会使安控系统无法获取电网运行信息或无法及时、可靠地下达控制措施命令,从而导致电网失去可观测性和可控性,严重时会危害电网的稳定性,甚至引发大停电事故.由此需要研究新一代电力系统控制保护专用通信网络,既能实现在各类控制系统中电网关键数据的共享,同时能满足数据传输过程的可靠性和实时性[8].
为满足适应复杂互联大电网运行的广域控制系统对通信网络广域、快速性、同步性、可靠性的要求,迫切需要研究一种新的广域安全稳定控制专用通信网络,如图7所示.

图7 新型安控系统专用通信框架结构
在如图7所示的扁平化结构中,可以将实时广域稳定控制的通信网划分为主站域网络、同级区域间的互连网络和级间的互连网络三部分,即:(1)主站域内网络;(2)同级区域间互连网络;(3)级间的互连网络.其中在主站域内网络中,终端和主站之间的通信在主站/协控站进行一次隔离,以保证数据的安全性,同时该网络应能支持大量的终端接入,以适应实际电网控制技术发展产生的控制功能需求.针对上述新型专用网络,相关科研单位已开展实验室半实物仿真研究,未来有望逐步验证网络性能并推广到实际广域控制系统,并为未来研究电力信息物理系统提供相应的通信基础设施.
5 结 论
本文首先分析了电网结构变化对现代广域控制系统以及配套通信系统所带来的挑战.接着研究了通信系统通道中断等故障对广域控制系统的影响,并结合实际电网的广域直流闭锁故障紧急控制和广域低频振荡阻尼控制等功能实现论证了对高性能通信环节的需求.最后介绍了目前正在研究的安全稳定控制专用网络的系统结构,努力为未来复杂互联大电网的各类安全稳定控制应用提供信息共享、实时性强、可靠性高的通信系统.
猜你喜欢
石油库与加油站(2020年2期)2020-11-23
自动化仪表(2020年10期)2020-11-13
中国交通信息化(2018年12期)2018-03-21
科学与财富(2017年16期)2017-06-13
科学家(2016年4期)2016-07-25
船舶力学(2015年6期)2015-12-12
电测与仪表(2015年2期)2015-04-09
航天返回与遥感(2014年1期)2014-07-31
汽车维护与修理(2014年10期)2014-02-28
河南科技(2014年23期)2014-02-27