
校园巡检机器人智能导航与控制
2018-12-12 09:00马宏伟王川伟
西安科技大学学报 2018年6期
杨 林,马宏伟,王川伟,夏 伟
(西安科技大学 机械工程学院,陕西 西安 710054)
0 引 言
随着机器人技术的飞速发展,人们期待用机器人代替自身去完成某些重复性、危险性的巡检任务,比如变电站巡检机器人[1]、超高压输电线巡检机器人[2]和核应急机器人[3]。尤其是近年来,突发事件增多,公共场所的安全问题变得非常重要。针对某些特定的安全隐患,应用巡检机器人进行定期巡检是解决这类问题的必由之路[4]。20世纪 60年代末,美国、德国、加拿大等国家先后开展了巡检机器人相关研究,分别研制了“勇气号”火星登陆车、OFRO环境监测机器人、RMI-9WT排爆机器人[5-7]。国内对于巡检机器人导航与控制方面的研究起步相对较晚,主要包括武汉大学、中科院沈阳自动化研究所、中科院自动化研究所等。王建元等通过结合巡检机器人技术,针对无值守变电站遥视系统的智能化和网络化多点监测趋势的问题,提出一种基于图论的智能寻迹的导航解决方法,并对各检测点关联信息,通过传递闭包理论的路径搜索算法,进行关联路径搜索[8]。周高等人提出了GPS/LMS组合导航的变电站巡检机器人控制系统,实现了巡检线路的优化与准确定位[9]。季宇寒等人提出了融合机器人激光雷达与编码器的信息,使用Gmapping算法建立二维栅格地图,同时使用自适应蒙特卡罗定位(AMCL)算法估计机器人位置和姿态,结合巡检线路,进行导航定位[10]。李长勇等人提出了基于多传感器相结合的机器人导航算法,利用RGB-D视觉和超声波传感器获取障碍物三维信息,通过启发式最佳搜索算法对导航路径进行优化[11]。丁林祥等人提出了增量式构建栅格地图、代价地图的环境地图构建方法和自适应蒙特卡罗定位方法以及运用Trajectory Rollout和Dynamic Window Approaches算法的路径规划方法,将移动机器人导航与控制相关的研究上升到一个新高度[12]。
文中研究的校园巡检机器人的主要任务是针对校园监控中存在的盲区进行安全监测,为了达到这样的目的,在巡检机器人的系统研究过程中需要解决以下几个关键技术,其中包括:机器人控制、环境感知、远程监控、遥感技术、导航技术、通信技术、多传感器融合技术等多学科的交叉融合[13-14]。其中,导航与控制系统的优劣将作为机器人能否顺利完成各类巡检任务的重要评价指标[15]。
1 巡检机器人的硬件结构设计
文中研究的校园巡检机器人采用双履带的机械结构,控制核心为嵌入式NI myrio-1900控制器,动力系统为36V移动电源,装配有2个86BL03型凯恩驱动电机,2个BLSD4875DC-2Q-H型直流无刷调速驱动器,可完成无级调速和差速转向,可实现自动巡检和远程遥操作2种控制方式。机器人前端装有1个视频图像采集装置和2个超声传感器,两侧分别装有1个红外传感器。机器人内部装有1个下位机NI myrio控制核心,1个三轴加速度传感器,1个GPS传感器,1个温度传感器。
机器人控制系统采用上位机、下位机通讯的二级分布式结构,上位机主要负责机器人系统的数据分析和处理,包括控制信号的处理和与下位机通讯的功能,提供人机交互的窗口,下位机主要负责机器人系统的动作执行、环境感知和环境监测,包括各种传感器信号的采集和电机驱动器的控制的功能。上、下位机的通讯通过WiFi实现,支持实时控制和分布式控制。通过对上位机、下位机、运动控制器和传感器的有效融合,制定了如图1所示的检测控制系统硬件组成框图。
2 巡检机器人控制系统软件设计
为了保证校园巡检作业任务、现场应用的实用性与可靠性指标的要求,校园巡检机器人采用远程遥操作和自主巡检相结合的控制模式,实现巡检机器人的行走及避障。其中,远程遥操作指操作人员可以通过判断机器人本体携带的摄像头传回的画面,可以人为干预机器人的行走路线,使机器人精确到达巡检目标区域完成任务;自主巡检指操作人员通过人机交互界面输入巡检目标位置坐标信息,机器人利用Pmod GPS导航传感器获取机器人的当前位置信息,并通过与目标位置信息比对后,自主对机器人行走路径进行全局规划。同时,在行走过程中,对机器人周围出现的障碍,采用模糊控制的策略进行有效避障,并完成局部路径规划,从而使机器人到达指定位置,并且可以将监测环境周围的图像和温度信息实时传回至上位机,达到完成巡检任务的目的。
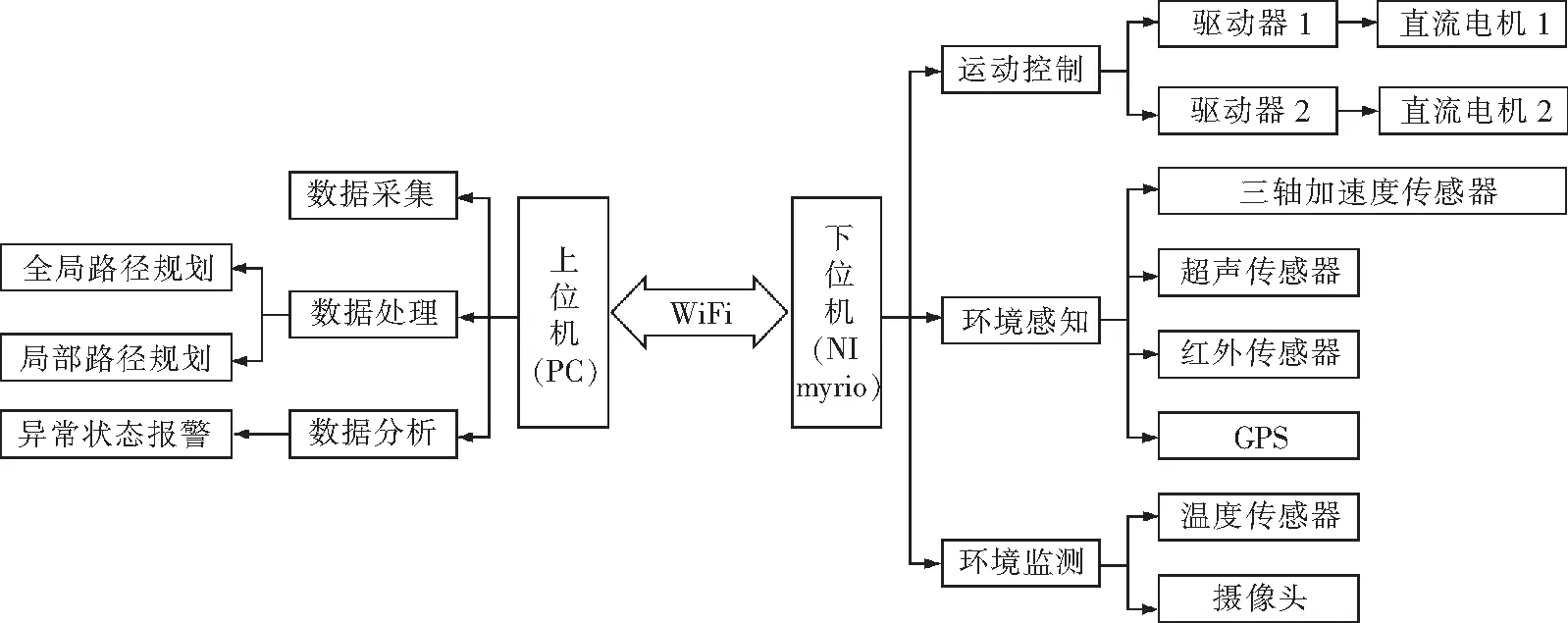
图1 检测控制系统硬件组成框Fig.1 Block diagram of hardware composition of detection and control system
与其他巡检机器人相比较而言,文中研发的校园巡检机器人,针对校园巡检的特殊需求,采用GPS导航作为全局路径规划和模糊控制算法作为局部路径规划的机器人组合控制策略,系统控制平台选用了嵌入式NI myrio控制核心进行开发,并通过LabVIEW图形化编程,缩短了整套控制系统的开发周期,提高了整个控制系统的鲁棒性和灵活性。通过采用二级分布式结构,保障了整个系统的实时性,提供了友好的人机交互界面。并且通过机器人前端携带的摄像头,可实时对巡检环境图像信息进行安全监测。同时,控制系统为了保证系统的通用性和任务的特殊性,分别构建了如图2所示的人机交互和环境交互系统模型,为巡检机器人的可靠运行提供了重要保证。

图2 机器人交互系统模型Fig.2 Robot interactive system model
3 全局路径规划
校园巡检机器人的全局路径规划,采用Pmod GPS导航模块提供实时导航信息,该导航模块采用全球定位系统(GPS)卫星网络在全球各地提供GPS接收器的高精度3D坐标(纬度、经度和高度)[16]。整个GPS导航是一个闭环的反馈系统,根据机器人的当前行驶情况和当前的经度纬度信息,调整机器人行驶方向,控制机器人转动角度,每次调整行驶方向后,前进1米,再与目标位置的坐标信息进行比对,如果是目标位置,停车后对该区域进行巡检工作,如果不是目标位置继续重复上一步的工作,在进行多次的判断和调整后,最终到达目标位置[17]。根据所述算法,进行LabVIEW程序设计,其中GPS导航部分的流程如图3所示。
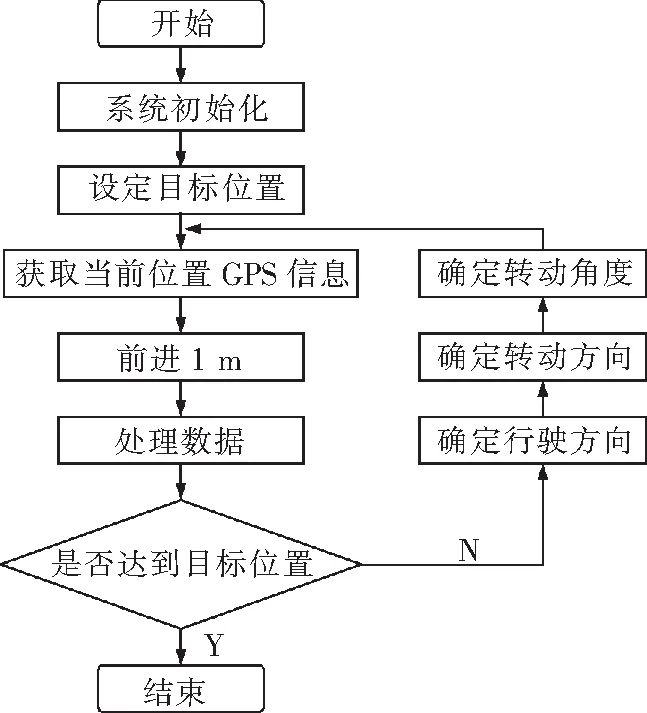
图3 GPS导航流程设计Fig.3 Design of GPS navigation flowchart
3.1 行驶方向的确定
通过下位机NI myrio控制核心,从Pmod GPS传感器获取到的“&GPRSM”语句中读取到巡检机器人当前位置的信息行驶方向角信息。文中将正北方向标定为导航方位的0°,按照顺时针方向依次进行标定[18-19]。导航起始点A(x1,y1)和目标点B(x2,y2)之间的连线AB通过计算坐标得到。设AB线的长度为dAB,如式(1)所示
(1)
机器人实际前进方向角为α,目标线路方向角为β,则可以得到以下关系,如式(2)所示
(2)
通过机器人当前位置坐标和1m前的相对位置坐标,用上述同样的方法计算得到机器人实际前进的方向角α,并推导出以下结论:当|α-β|<90°或|α-β|>270°时,机器人的行驶方向与导航方向相同,否则机器人的行驶方向与导航方向相反。
3.2 转动方向的确定
利用矢量法控制转动方向,Z1和Z2分别代表机器人当前的行驶方向和到达目标点的理想行驶方向,则可以得到以下关系,如式(3)所示
(3)
因此,可以得到机器人的转动角θ=β-α,θ∈(-2π,2π),为了便于控制机器人的转动方向,并且使机器人每次转动角控制在180°的范围内,对所求转动角θ进行转换使其取值范围控制在(-π,π)之间。则可以得到机器人实际转动角ε具体换算关系,如式(4)所示
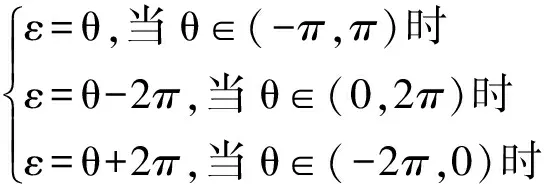
(4)
通过上述换算关系的变化,可将θ∈(-2π,2π)转换为ε∈(-π,π)。此时,将机器人整个转动可分为:(-π,0)和(0,π)2种情况。可以得到以下结论:当ε=(-π,0)时,机器人需要完成左转向;当ε=(0,π)时,机器人需要完成右转向。
4 局部路径规划
在环境信息不完全或不准确的情况下,无法采用全局路径规划最优的办法,必须考虑巡检机器人在行走过程中对自身所处环境的感知,在完成GPS全局路径规划的基础上,采用多传感器融合的模糊控制算法,解决局部路径规划问题,采用LabVIEW编程对其算法进行优化,从而使机器人整个控制系统具有较好的自适应性和鲁棒性[20-21]。
4.1 模糊控制运动模型建立
系统考虑到巡检任务的特殊性以及不同传感器的特点,该控制系统采用2个超声传感器,2个红外传感器和1个摄像头,对机器人所处环境进行检测,传感器的配置方案如图4所示。超声传感器安装在机器人前面,红外传感器安装在机器人两侧。实验证明,超声传感器的有效测距范围为0~400 cm,红外传感器的有效测距范围为0~100 cm.
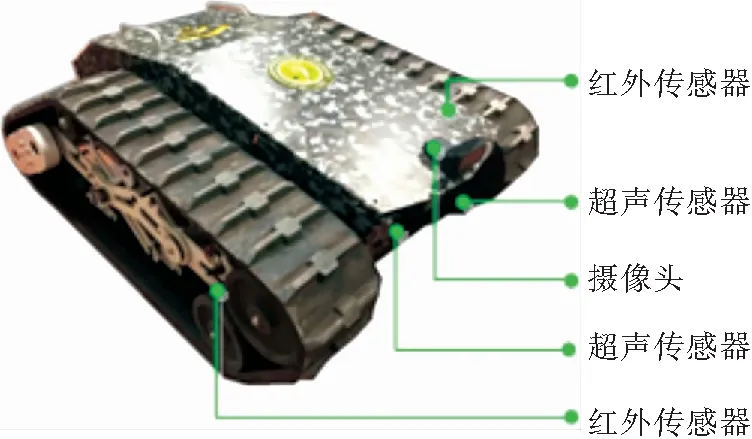
图4 传感器配置实物Fig.4 Sensor configuration object
为了方便控制系统编程设计,同时减少4个距离对机器人的行为决策而产生大量计算,减小机器人在行走以及转弯过程中与障碍物发生碰撞的几率,提高控制系统的实时性,对各个传感器数据进行二进制编码以及信息融合,从而实现模糊算法的控制策略。设定该传感器检测到离障碍物的距离小于等于40 cm(假设该系统的安全距离为40 cm),即编码为1,检测到离障碍物距离大于40 cm,没有障碍物或者超出传感器测量最大值,即编码为0,按照传感器排布顺序,整合为一个四位二进制编码,找到对应的控制策略,从而达到方便控制的目的。
4.2 环境模型分类及其控制策略
根据传感器的有效监测范围,如果障碍物的距离超过安全距离,系统可以认定该方向可以正常前进,如果障碍物的距离小于安全距离,系统必须对当前的行走路线进行相应的调整[22]。根据障碍物有可能出现在机器人运行轨迹的组合,系统将机器人所处环境分为以下16种情况,如图5所示,其中矩形代表机器人本体,条形框和圆形都代表障碍物。
通过机器人本体以及传感器检测到障碍物的方向信息,机器人为了达到有效避障,完成局部路径规划,实现模糊控制的策略,进行二进制编码。表1列出机器人在相应情况下应该执行对应的动作。
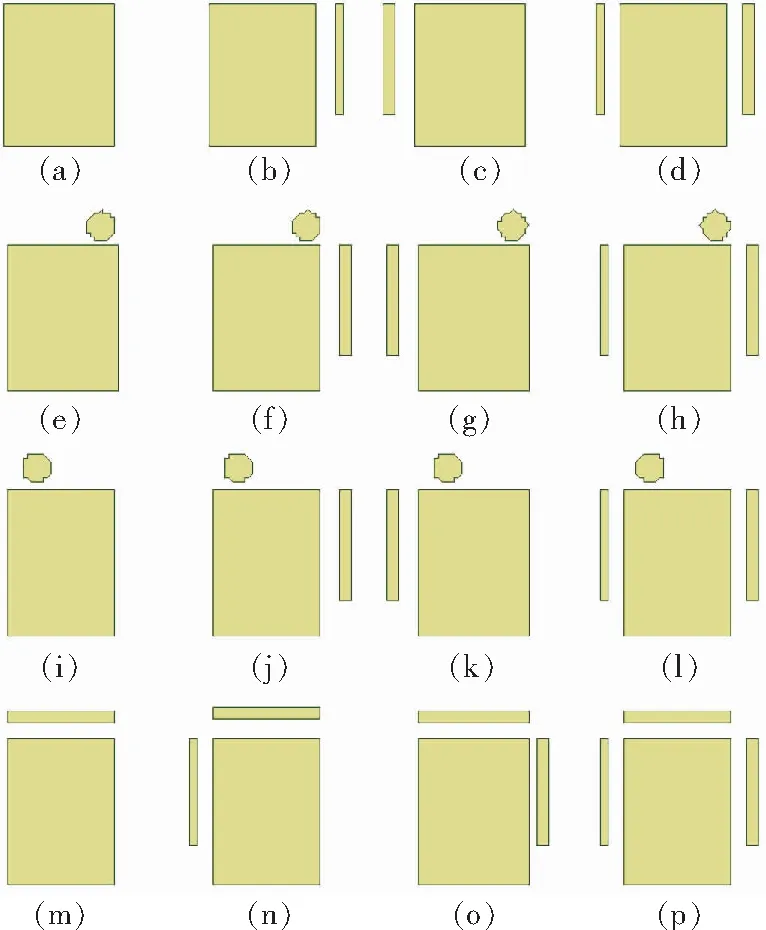
图5 机器人所处环境状况分类Fig.5 Classification of environmental conditions for robot
4.3 模糊控制隶属函数
在模糊控制理论中,机器人通过模糊变量进行模糊推理,而机器人所处环境中各个方向上的传感器检测到的障碍物距离信息、目标方向信息都是具体的量,因此在这里需要将具体量转换为模糊量[23-25]。使用连续型论域的思想,采用简单线性化处理的方法,将距离输入量的论域划分为{N,M,F};将目标点与航向夹角的论域划分为{L,R};将机器人转弯半径的大小划分为{LD,LS,ZZ,RS,RD}。模糊隶属函数主要实现精确量的模糊化,为模糊系统控制策略提供输入变量,通过大量实验数据并在仿真过程中对参数不断进行优化,得到相应的隶属度函数,最终根据系统的输入输出要求,将隶属函数设置如下。

表1 障碍物分布情况对应机器人控制策略Table 1 Robot control strategy based on the distribution of obstacles
备注:A为前进;B为左转;C为右转;D为后退加转向。
1)按照障碍物距离机器人本体的远近程度,将分为3个模糊集:N(近),M(中),F(远),其隶属函数如图6所示。
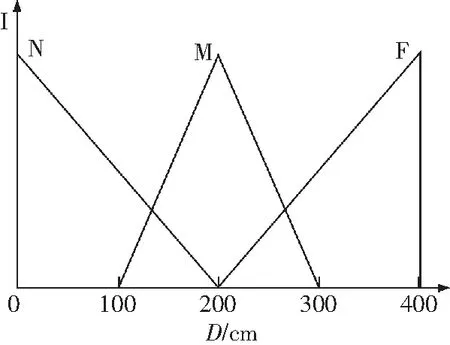
图6 障碍物远近D隶属函数Fig.6 Obstacle far and near D membership function
2)按照全局路径规划中规定的目标点与航向的夹角Vθ,取L(左)、R(右)分别表示目标点位于机器人的左侧和右侧,建立隶属函数:当Vθ≥0时,隶属度为L;当Vθ≤0时,隶属度为R;如图7所示,其中Vθ∈[-180°,180°].
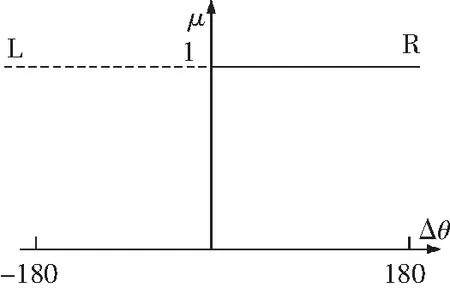
图7 夹角Vθ隶属函数Fig.7 Membership function of angle Vθ
3)按照机器人转弯半径的大小,将转向模糊控制量α分为:LD(左大转弯)、LS(左小转弯)、ZZ(保持直行)、RS(右小转弯)、RD(右大转弯),转弯角度论域为[-30°,30°],隶属函数取三角形,如图8所示。

图8 转弯半径α隶属函数Fig.8 Membership function of turning radius α
4.4 建立模糊控制策略的规则
依据模糊控制隶属函数的思想,建立机器人运动模型和障碍物环境模型。为了有效避障,达到局部路径规划的效果,制定以下模糊控制策略的规则:当机器人靠近障碍物时,则以大转弯的方式避开障碍物;当机器人远离障碍物时,则以目标点为导向,用小转弯方式趋近目标点;当机器人与障碍物距离为中时,则以中转弯方式行驶,既避开障碍物,又趋近目标点,以避障为主。
5 实验验证
为验证文中研究的校园巡检机器人机构、导航及控制系统的有效性,分别在室内和室外建立了模拟巡检环境进行实验,机器人本体控制核心采用NI myrio,上、下位机均采用LabVIEW图形化编程,构建机器人控制系统。实验过程中,首先在室内环境验证机器人模糊控制局部路径规划能力如图9(a),(b)所示,在障碍物的影响下完成转弯。在室外露天环境下验证机器人远程遥操作爬坡、越障如图9(c),(d)所示及全局路径规划能力如图9(e),(f),(g),(h)所示,机器人的起始点A的GPS坐标为(N34°14′0″;E108°57′22″),目标点D的GPS坐标为(N34°14′1″;E108°57′22″),在完成全局路径规划过程中避开障碍物B和C,最终成功到底预定目标点D.经过实验表明,采用该种控制策略,系统具有较高的实时性,同时控制系统可以快速的实现机器人控制的复杂算法和良好的鲁棒性,使得整套系统成为一种高性能的机器人控制系统。

图9 机器人测试实验Fig.9 Robot test experiment
6 结 论
1)采用了GPS导航作为全局路径规划和模糊控制算法作为局部路径规划的机器人组合控制策略,通过多传感器信息融合技术,增强了机器人控制系统的鲁棒性,实现了巡检机器人自主避障行走;
2)文中提出了借助NI myrio作为控制核心和LabVIEW图形化编程的巡检机器人控制系统构建方法,在处理系统上层任务管理的同时,可进行电机实时控制和实时时间处理,极大地提高了控制系统的开发效率;
3)研究了控制系统二级分布式结构,可以有效地完成上、下位机之间的通讯,实时完成各传感器之间的信息交互,保障了图像采集与传输的实时性,并且实现了远程遥操作与局部自主控制模式的有机结合;
4)控制系统通过添加丰富的前置面板控件,增加了机器人的人机交互和环境交互能力,实现了机器人多任务控制系统的实验要求。基于控制核心丰富的I/O接口,可根据用户实际需求增加或减少电机和传感器数量,提高了整个控制系统的灵活性;
5)文中研究的巡检机器人,可满足校园巡检任务的要求。其导航与控制策略方面的相关研究,为巡检机器人的智能化发展提供了一种高效可靠的方法。
猜你喜欢
能源工程(2022年2期)2022-05-23
成都信息工程大学学报(2021年6期)2021-02-12
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2019年16期)2019-09-27
消费导刊(2018年10期)2018-08-20
山东工业技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
通信电源技术(2016年1期)2016-04-16
