基于水下智能仿生鱼的创新教学探索与研究
2018-12-08 01:19王梅娟张海涛杨艺斌
机器人技术与应用 2018年5期
王梅娟 张海涛 卢 涌 杨艺斌
(1 陆军工程大学指挥控制工程学院,南京,210007;2 陆军工程大学国防工程学院,南京,210007)
0 引言
创新是一个民族进步的灵魂,没有创新能力的民族,难以屹立于世界先进民族之林;创新是军队进步的灵魂,一支没有创新能力的军队,难以立于不败之地。军事院校人才培养的总体目标明确“学生要具有较强的学习能力、创新思维能力和实践能力”,足见创新是新型军事人才的主要特征,因此,在军队干部队伍中培养高水平的军事人才,成为军事院校普遍关注的焦点。
本文着眼于创新型军事人才培养,以创新人才教育为导向,以俱乐部为平台,以国际水中机器人大赛为牵引,探索实施以“三环三层”教学为主要内容的仿生机器人创新教育教学模式。该模式不仅有效弥补了在传统课堂教学环境下,不能为学员提供理想的、综合的实践平台的不足,而且充分激发了学员内在的创新动力,发挥学员聪明才智,提高学员自主实践能力,为学员创新能力培养提供良好的土壤,对大学教学改革和学员个人能力培养具有重要的意义和作用。
1 创新教学目标
陆军工程大学在贯彻落实“创新力教育训练计划”的过程中,具体实施“着重通过毕业论文(设计)、综合实践等环节,以及课外科技创新、学科竞赛、学术交流、信息技能竞赛、参与科研训练等系列活动,进一步强化和培养学生的科技创新素养和信息素养,促进学生创新精神、批判性思维和创造性解决实际问题能力的形成和提升”,且开展科技创新俱乐部活动和参加机器人大赛是实施该计划的明确要求。笔者在陆军工程大学机器人俱乐部的建设和活动开展过程中,不断探索军队院校转型条件下创新型人才的培养模式,积极研究并解析教学中存在的突出问题。
1.1 学习能力问题
在学习过程中,绝大多数学生是想学、愿学,但是不知道该学什么、怎样学,以及学了有什么用,这一点在基础教学集中阶段的学生身上反映明显。
1.2 理论与实践创新相结合的问题
新的人才培养方案中,陆军工程大学针对指挥类合训学员开设了机械类和电子类工程技术基础课程。而机器人技术融合了机械、电子、传感器、程序设计等多个领域的知识,能够有效激发学生学习的主动性、创造性和内在潜能,并将学生课堂所学的多方面知识综合运用于实践之中。
1.3 创新型人才的选拔和培养问题
如何选拔创新型人才,实施创新性教学,实现学生自主学习和自主创新,并由典型示范作用影响和带动全体学生共同学习、共同进步,以及如何设置教学制度、教学模式、教学条件和人文环境来培养创新型人才是亟待解决的根本问题。
2 基于智能仿生鱼的“三环三层”教学体系
2.1 我国机器人教育发展现状
机器人教育起源于Parker、Martin和Sargent1989年在美国麻省理工学院创办的名为6.270的课程,该课程以机器人设计竞赛的方式,让学生展开分组实践。其影响深远,许多机器人比赛项目的灵感均来源于此课程,同时把机器人设计实践导入大学工程教育的思想也大多来源于此课程。
中国机器人教育联盟2016年底发布的数据显示:目前,全国约有7600家机器人教育机构,最近5年增长了近15倍,这些机构以乐高公司、北京乐博教育科技有限公司、外太空机器人俱乐部等为代表,主要面向中小学生,并且独立在九年一贯制教育培训之外,缺少统一的培养模式和标准。
当前中专及技校侧重于机器人基础应用人才的培养,即:教学生怎么使用机器人。即使在高校研究生培养层面,目前智能机器人及其应用还只是自动化学科的一个研究方向。高校机器人教育的发展夹在市场和科研之间,基本上只能以竞赛为载体促进其发展。2016年,东南大学自动化学院开设全国首个机器人工程本科专业,填补了教育部本科专业目录里机器人工程本科专业的空白,但目前仍有很多高校尚未将机器人专业独立设置成专业培养课程。同年,我国教育部在有关教育信息化未来五年规划中,明确指出:探索STEAM教育、创客教育等新教育模式。由此可见,高校机器人教育模式和体系的探索已迫在眉睫。
2.2 基于MURobotSys平台的水下智能仿生鱼
MURobotSys[1]是国际水中机器人大赛水下仿生机器人控制平台,涉及机械电子学、机器人学、智能控制、信号通信、计算机视觉、计算机图形学等。该赛事涉及的水下机器人研究,如:水下多仿生机器人协作控制系统,具有广泛的军事应用前景,可以在水下资源探测、水下侦查搜救,在军事任务方面发挥重要作用。
基于MURobotSys平台展开的全局竞技是本文探讨的主要内容之一,包括2VS2、1VS1、角力、救援等多个项目,其硬件架构如图1所示。
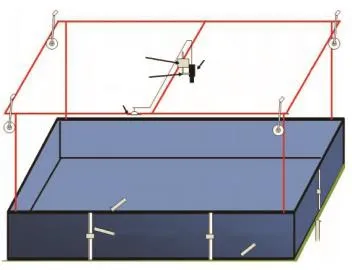
图1 MURobotSys平台硬件架构
MURobotSys综合实验平台的基本工作原理[2]是:首先通过摄像头采集实时图像,并将采集图像显示在用户界面的“原始图像处理”窗口中,再根据用户设定的色调、亮度、饱和度做进一步调整和处理;在“图像预处理”窗口,以最优的特征识别方法来识别有效信息,然后通过颜色特征,结合用户预先设定的颜色阈值,识别出所需颜色块的位置和大小,从而得到“环境信息”。经过一系列的图像识别过程和MURobotSys周期性控制机器鱼的特点,最终得出机器鱼前后坐标位置的变化,这是控制对象速度、加速度等信息的计算依据,同时也是编写策略、控制仿生机器人竞技的信息来源。
当得到环境信息后,用户首先采用MURobotSys软件系统执行选择命令(如图2所示),然后,系统结合用户选择的策略,调用用户预先编写好的协作策略计算出对每条仿生机器鱼的控制命令,并通过设定的串口实时传送,机器鱼接受指令并执行,如图3所示。
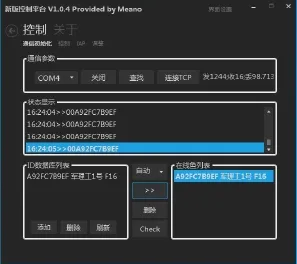
图2 MURobotSys软件控制小平台

图3 基于MURobotSys平台的机器鱼
2.3 “三环三层”教学体系
本文基于MURobotSys平台水下智能仿生鱼的教学体系,作为人才的辅助培养方案,在没有特定课时的前提下,采用竞赛驱动的培养模式[3-4],着眼于解决现实问题,提出“三环三层”教学体系,如图4所示。

图4 基于智能仿生鱼的“三环三层”教学体系
所谓的三环是指水下机器人团队培养的三个重要环节:招收环节、培训环节、竞赛环节;所谓三层是指对学生创新能力培养所达到的三个层次:引导层、滋养层、升华层。笔者认为,只有在这三个环节达到创新所需的三个层次,才能取得创新能力培养的最佳效果。
2.3.1 招收环节激发学生兴趣
机器人俱乐部招生工作一般安排在秋季学期,通过宣讲并展示大量影视资料、机器人实物,分享成功经验和交流心得体会,激发学生兴趣,引领学生登堂入室。
这是培养学生创新能力的引导层,解决学生要学什么的问题,潜移默化引导学生的创新欲求,使学生创新能力落地生根。
2.3.2 培训环节传授学生技能
机器人俱乐部通过授课培训,帮助、鼓励学生获取机器人的各项技能。学校组建机器人教练员团队,开设机器人相关课程,以机器人系统原理为主线,全面涉及感测技术、通信技术、智能技术、控制技术和机械设计等[6-7],如图5所示,做到纵向贯通、横向拓宽,并且每年暑期前开展技能培训活动,采用老学生带新学生的小组模式,帮助新学生扫清在获取机器人技能过程中的障碍。
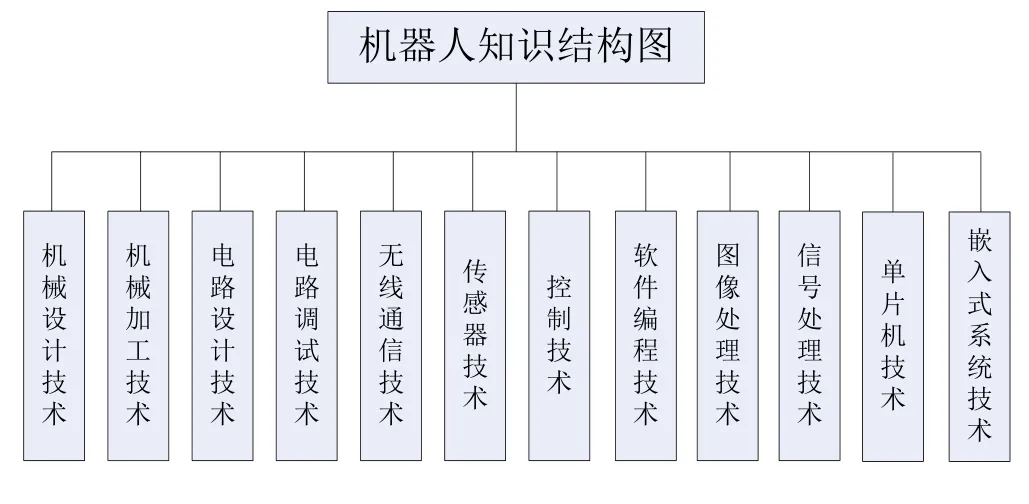
图5 水下机器人基础知识结构
这是培养学生创新能力的滋养层,解决学生在理论与实践相结合过程中遇到的问题。学生的创新能力不是“教”出来的,需要采用科学的方式进行培养。课程内容由学校各学科专业老师组成的俱乐部教练团队精心设置,在有限的时间里对学生所需知识面的广度和深度方面做到尽量平衡,不同的学生欠缺点和兴趣点不尽相同,这是一个动态的教学过程。只有建立科学的创新培养模式,实施有力的驱动机制,解决内在动力问题,才能为学员创新能力的培养提供生长所需的阳光。学校通过理论学习指导实践操作,实践创新促进理论学习,滋养学生的创新能力,使学生创新能力逐渐发芽[8]。
2.3.3 竞赛环节挖掘学生潜能
经过一段时间的理论教学和实践培训,学校决定采用以竞赛驱动的培养模式。该模式实行导师机制,以竞赛项目为牵引,以创新小组为组织形式,分工合作,针对竞赛项目的难点和竞争对手的挑战,开动创新思维,努力采用新技术、新方法、新设计、新材料,完善机器人性能,从而最大限度地激发学生的创新潜能。
这是培养学生创新能力的升华层,该环节强调以学生小组为中心,充分发挥教员的引导作用,使学生的创新能力得到升华并开花结果。
3 创新教学探索与实践
笔者按照“创新始于问题,源于实践”的理念,针对教学中遇到的问题,从理论和实践两个渠道出发,促进通识教育、专业教育、创新实践教育三方面的结合,打造基本认识型实验、设计型实验、综合型实验和研究创新型实验四大类型,实现课内多样化研究性教学、研究性实验模式和课外多样化自主创新学习模式,从而形成“个性化、双渠道、三结合、四层次、多模式”的创新教育实践教学体系。该教学体系对提升学生以创新能力为核心的综合能力素质方面,取得了显著的成效。
3.1 建设水下智能实验平台
机器人俱乐部是陆军工程大学建设机器人实验环境平台、多学科融合的创新教育体系,其中,水中仿生机器人项目在长期侧重软件调试、缺乏硬件实践的环境下,一直停留在仿真阶段。本文研究的创新教学首先搭建了教学实验平台,购置MURobotSys系统,并在实际开发环境中进行仿真,为学生开展机器人创新活动提供场地和基础设施。
3.2 开展俱乐部学习交流活动
学校在参加早期机器人大赛过程中,理论课程内容分散,不同专业的教员讲授不同模块的内容,缺少一定的连贯性和系统性,往往要等到学生们在学习过程中遇到的问题集中到一起的时候,老师才开始传授解决方案,学生被动等待知识的周期较长。
在基于MURobotSys平台智能仿生鱼环境的搭建和竞赛的牵引下,学生逐步形成连贯和系统的知识体系,在知识领域框架平台的引导下,学校定期开展俱乐部交流学习活动,形成各院交叉、各专业汇集的电路、信号、计算机、工程图学等多学科融合的讨论环境。对于刚参与水下机器人平台开发与实践的学生来说,从工程教育机器人项目过渡到智能仿生鱼项目需要一个学习和锻炼的过程,而讨论环境可以促进学生主动交流学习。
3.3 组织参加机器人竞赛
实践成果表明,机器人实践活动是培养学生创新精神、提高学生动手能力的有效形式;机器人竞赛的全面开展对提升电子类、机械类、工程类专业学生的创新实践能力发挥了积极作用,强化了学生动手能力的训练,促进了学生综合素质的培养;对于计算机大类的学生而言,实践能力的培养是其发展综合素质的重要环节。
陆军工程大学在参加国际水中机器人大赛全局项目、自主视觉项目的过程中,不仅培养了学生查阅资料能力、自学能力、分析问题与解决问题的能力、综合设计与调试能力、科技论文写作能力等,而且还培养了学生理论联系实际的作风、团结协作精神和创新意识。
3.4 依托实验平台开展创新活动
依托MURobotSys平台开展创新活动研究,不仅可以用于学生参加国际水中机器人大赛全局组项目,还可以用于学生自主研发创新项目。学生的思维十分活跃,敢想、敢做,在类似于“蓝桥杯”、“卓越杯”的创新能力竞技赛事中,学生的创意表现和思维发散能力都得到充分展现。因此,在依托实验平台实体水下仿生鱼的开发过程中,学生可以对其进行更多的创意设计和改进,教员也引导学生从规则中跳出来,让学生充分展示创意才华。
4 总结
陆军工程大学经过连续3年的探索与实践,创新活动开展范围在扩大、人数在增加,基于智能仿生鱼的教学体系已逐步形成稳定的教学、实践、交流、竞赛模式,对学员脑力、执行力、创新力培养方面起到了积极的推进作用。在经历完整的教学体系和参加竞赛的实践活动中,学生的综合素质特别是创新素质得到明显提高,不仅学会了如何学习和做事,而且还在国际水中机器人大赛中获得了冠、亚军6项,全国机器人大赛冠军2项,发表多篇成果论文;结合创新课题、课程设计和毕业设计将机器人技术运用于军事训练和军用装备,陆续完成了10余台军用机器人作品的研发探索,其中1名学生获大学优秀论文奖。教学相长,指导老师结合各自教学经验,在指导本科生论文发表、毕业设计等方面有了更加丰富的经验。
本文探索的教学内容基于MURobotSys仿生机器鱼展开,完成了非课时内教学模式的探索与实践,并打造出机器人俱乐部中具有鲜明特色的水下仿生机器人平台,建成一个高标准、开放型、注重创新能力培养的学员科技创新环境,开展多学科融合的教学体系建设,形成科学、系统、高效的教学内容体系和具备创新能力、实践能力的机器人竞赛团队,开启检验成果、积累经验的良好循环模式。今后,学院的创新工作还将进一步拓展和完善,将以学生为本的创新教育推向更高平台。
猜你喜欢
中等数学(2022年3期)2022-06-05
中学生学习报(2022年14期)2022-04-15
化工管理(2021年7期)2021-05-13
信息化建设(2019年2期)2019-03-27
中学生数理化·高一版(2017年3期)2017-07-08
北方音乐(2017年4期)2017-05-04
中学生数理化·高一版(2016年6期)2016-05-14
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07