机器人暗挖施工隧道临时仰拱的安全性评价研究
2018-12-06 08:52:54邵珠山杨跃宗郑钦文徐延军梁西军
西安建筑科技大学学报(自然科学版) 2018年5期
邵珠山,吴 奎,杨跃宗,郑钦文,徐延军,梁西军
(1.西安建筑科技大学 土木工程学院,陕西 西安 710055;2.中铁一局集团有限公司,陕西 西安 710054)
随着我国经济的快速发展,城市人口急剧增加,为了解决城市化带来的土地制约、交通拥堵等各种挑战,修建各种各样的隧道及地下工程成了必然趋势[1-3].尤其是城市地下轨道的建设,对施工要求也愈来愈高.临时仰拱作为一种施工辅助措施,其施工工艺简单、实用,是有效减小变形的方法之一[4].目前,对临时仰拱的设计主要集中在经验法方面,因此,深入对临时仰拱的稳定进行研究,是控制施工过程中隧道变形的基础.
有关临时仰拱的问题,一些学者已进行了探讨.就其设置形式而言,水平直线型临时仰拱可提供较大水平支撑力;在悬空状态时,可提供的支撑力仍保持不变,且可有效抵抗支护下沉.从变形控制方面,临时仰拱对于控制洞室的水平收敛和地表沉降效果显著;而由于初期支护承担其荷载,在控制拱顶沉降方面不是很理想[4-5].
随着隧道开挖方法的不断优化,临时仰拱承担的作业荷载,其差异往往很大.目前,尚未有学者就荷载问题引起临时仰拱稳定性的问题进行相关研究.
结合西安地铁四号线火车站项目首次引进智能机器人开挖隧道的工程背景,本文对机器人荷载作用下临时仰拱的稳定性进行了研究.通过静力分析,计算在不同荷载和不同跨度情况下临时仰拱的安全性.建立三维有限元模型,讨论了在机器人开挖情况下临时仰拱及隧道的变形.可为类似工程提供相关指导.
1 挖掘机器人原理
智能机器人是瑞典布鲁克公司研制的多功能机器人,三臂结构,可实现液压锤的多方向挖掘作业,电动力遥控操作的设计,大大降低了机器人体积和重量,也提高了挖掘作业的安全性和效率,因此能够实现在临时仰拱上对隧道进行全自动挖掘控制.现阶段,布鲁克机器人已经在我国冶金、水泥和建筑改建等行业有着广泛的应用,但其在隧道中的使用仍有很大发展的空间.
一般来说,隧道施工中,机器人可配合全断面掘进(TBM)和钻爆工艺应用,用于挖掘隧道中的连接通道、安全洞、市政管道和地铁车站建设等.其用于隧道施工中的最大优势是:机器人作业动力和范围相当于一台15~20 t的挖掘机,而自重只有不到5 t,体积小巧.所以,机器人最适合取代使用小挖和风钻作业的隧道施工.见图1,挖掘机器人在西安地铁四号线火车站施工现场作业.

图1 机器人挖掘作业Fig.1 Site operation of robot
2 临时仰拱静力研究
2.1 计算简图与简图评价
实际结构的复杂性决定完全按照实际情况进行力学模型分析是不可能的,对工程设计而言,也是不必要的.因此,在受力分析之前,需对实际情况加以简化,保留基本特征,略去多余细节.应坚持3点原则:(1)从实际结构出发,反应主要力学性能;(2)分清主次,略去细节;(3)正确判断计算简图与实际结构的差异,以在后续的结构设计中做出相应的调整[6-7].
临时仰拱施工工艺是:在台阶底部接钢梁与初期支护和中隔撑封闭成环,再喷射混凝土,形成临时仰拱.依据临时仰拱的施做特性,按模型分析原则,将临时仰拱的研究对象分为三部分,包括工字梁、喷射混凝土板以及梁端接头螺栓.其中,工字梁安装完成后,与初衬、中隔撑封闭形成稳定受力结构,而后在梁间喷射混凝土形成混凝土板块,类似于房屋建筑中的混凝土板.由于工字梁排布间隔远小于临时仰拱的纵向跨度,混凝土板其受力特性接近于单向板,可根据结构设计中单向板的研究方法进行分析.
2.1.1 工字梁模型
对临时仰拱的工字梁可采取简支直梁的计算模型.依据施工现场情况,梁端接头采取2×2螺栓连接,但实际施工过程中,接头处理做不到完全刚性,且中隔撑与初衬不能视为绝对固端,工字梁与二者接头处均可发生一定程度的相对转动.故对梁端连接方式按铰接处理,整个计算模型是偏于安全的.同时,临时仰拱弧度较小,可按直线选取计算模型.据研究[8-10],简支弯梁采用直线梁模型偏于不安全,但对于小弧度简支弯梁而言,弯矩、剪力、挠度等计算结果差异并不大,安全系数稍留有富余即可.因此,对工字梁采取图2(a)计算模型既满足简图选取要求,也符合安全要求.
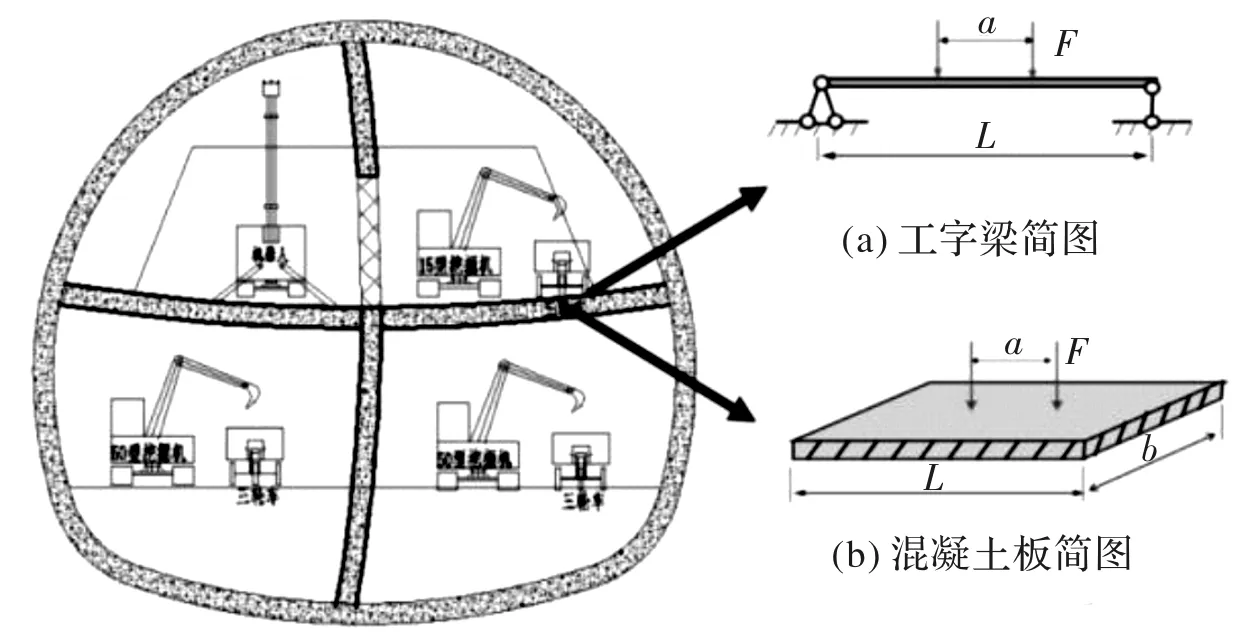
图2 计算简图Fig.2 Computing model
2.1.2 混凝土板模型
根据隧道设计资料,板由底部钢筋加喷射混凝土组成.对钢筋混凝土板进行适当地简化,将钢筋的影响考虑到喷射混凝土中[11],板块作为均质连续且各向同性的材料参与计算.取1 m跨长初始混凝土板的横断面,如图3,等效成如图4所示的截面.
板的弹性模量采用等效的方法,等效公式为
EA=EA1+EA2
式中:E、A分别为等效后的弹性模量和截面面积;E1、A1分别为钢筋的弹性模量和横截面积,E2、A2分别为喷射混凝土的弹性模量和横截面积.
临时仰拱中混凝土板L/b远远大于3,荷载向短边方向传递,且传力路径远小于智能机器人所施加的集中荷载间距.模型如图2(b)所示.
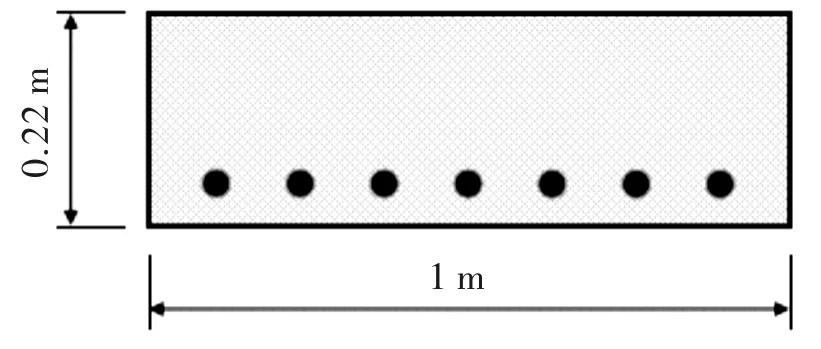
图3 混凝土板横截面Fig.3 Cross section of concrete slab
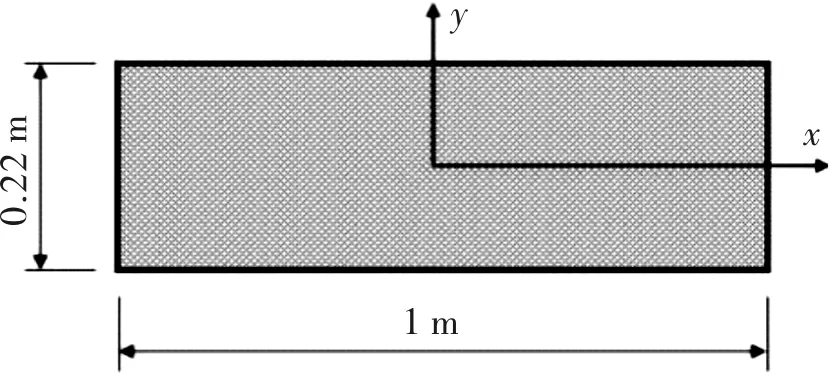
图4 等效后的横截面Fig.4 Equivalent cross section

图5 工法截面图Fig.5 Tunnel excavation process and numerical model section
3.2 工况介绍
西安地铁四号线火车站项目采用CRD工法开挖,为推广机器人在不同工法中的应用,本文另选择了其他两种采用临时仰拱的工法:三台阶七步法[12]和双侧壁导坑法[13],分析在不同工法下应用机器人时临时仰拱的安全性.
西安地铁四号线火车站工程采用的是瑞典布鲁克公司生产的型号为160的挖掘机器人,将该型号机器人荷载作为本文的基本荷载1.随着机器人开挖能力的增加,与之相应的是机器人荷载的增大.若为进一步加快开挖速度,临时仰拱必须承担更大的荷载.本文在布鲁克公司目前所生产的机器人型号中,选取了其他3种型号机器人,作为基本荷载2、3和4.在荷载取值时,考虑机器人挖掘臂向上铲土时对临时仰拱产生的反作用力,同时由于机器人行走而产生的振动荷载,根据规范,对机器人自重荷载(静荷载)乘以1.1倍放大系数.临时仰拱在不同荷载与工法(体现为跨度)下的工况见表1.

表1 临时仰拱工况表Tab.1 Different conditions of temporary inverted arch
3.3 结果分析与讨论
工字梁的计算结果见图6与图7.
分析结果表明,在工况2-4和3-4时,梁的安全系数小于1,结构发生失效,其余工况梁的安全储备满足要求.分析图6结果可发现:跨度对于使用机器人开挖时施工的安全性具有重要影响.忽略工字梁已失效的工况,由图7,工字梁最大挠度为45.39 mm。
根据规范要求,工作平台梁的变形容许值[VT]不允许超过L/400,则工况1-X、2-X、3-X挠度变形允许值分别为:14.25 mm、17.00 mm、20.00 mm。 考虑到隧道开挖过程中,临时仰拱作为临时支护结构,按规定会及时拆除,则挠度值可突破变形许可,但突破值不宜过大.因为临时仰拱作为隧道施工的一种辅助措施,过大的挠度值会破坏其与初衬、中隔撑组成的稳定受力结构,对封闭的支护结构产生向洞室的内拉作用,造成支护结构既抵抗围岩压力,又承担自身内部的拉力,极大地降低支护抵抗围岩下沉和水平收敛的能力.若临时仰拱兼做弃渣运输通道,过大变形既不利于机器人的挖掘施工,也对土石方的运输造成困难.因此,由图6与图7,跨度与机器人荷载都对临时仰拱安全性造成极大影响,若二者之一达到相当量值,则须采取必要措施,如增大工字钢截面、提高钢材强度等级等.
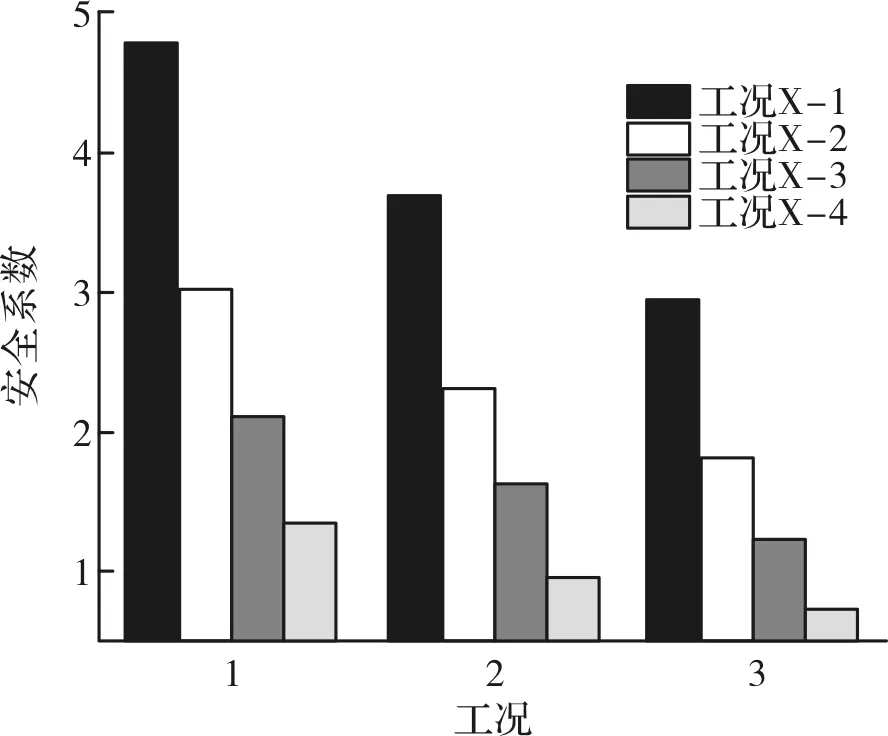
图6 工字梁安全系数Fig.6 Safety factor of I-beam
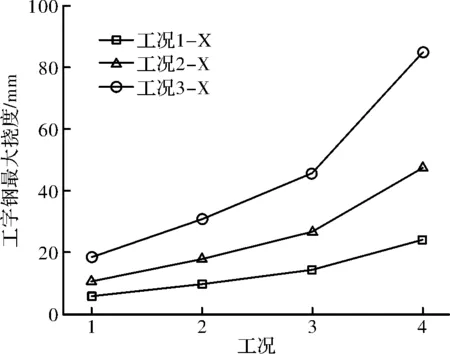
图7 工字梁不同工况下最大挠度Fig.7 Maximum deflection of I-beam under different conditions
同时,在荷载作用下,工字梁的上翼缘受压,根据钢结构稳定性要求,上翼缘存在发生失稳的可能.但在实际施工中,工字梁安装就位后,会立刻喷射混凝土,整个工字梁实际处在混凝土板包裹中,这相当于在工字梁的上翼缘增加了无数的侧向支撑,工字梁在平面内、平面外均不会发生失稳现象.设计时对梁的失稳要求可不予考虑,一定程度简化了计算过程.
表2是混凝土板的计算结果.临时仰拱的混凝土板属单向板,机器人荷载沿短边传递给工字梁.经分析,跨度对混凝土板的安全与变形不起控制作用.为简化计算,对混凝土板只进行荷载下的挠度及安全系数计算.
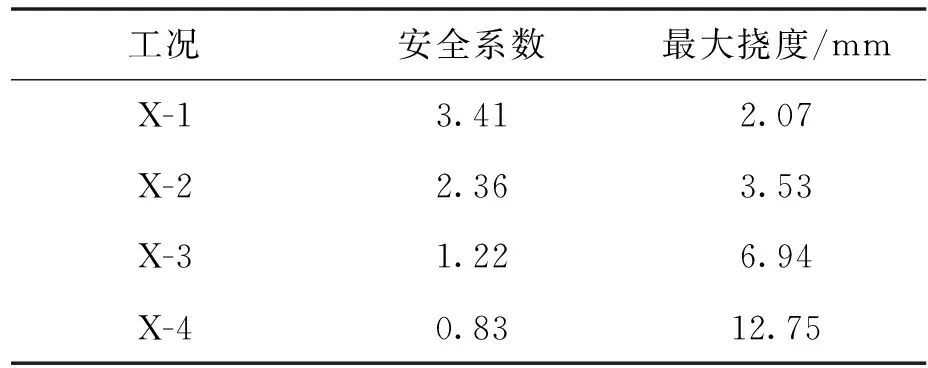
表2 混凝土板安全系数及最大挠度Tab.2 Safety factor and maximum deflection of concret slab
结果表明,荷载对混凝土楼板的承载能力起控制作用.当机器人设计荷载达到33.96 kN时,混凝土板失效.所以,若工程中为加快开挖速度而引进大荷载机器人,必须将混凝土板的稳定性作为安全考虑之一.同时,由于板跨方向的支承为刚性连接(实际介于刚接与铰接之间),根据结构力学原理可知,混凝土板上部会产生负弯矩.经计算,四种工况下的上部弯矩均略小于底部弯矩最大值.施工中可采取在支承上部即工字梁上翼缘与下翼缘均点焊钢筋的措施,可增加混凝土板的安全性.或者可在混凝土板上采取铺设临时钢板的措施,增加板的受弯承载性能[14].同时,铺设的钢板可循环利用,既体现绿色施工,又具有极大经济性.
工字梁的承载能力是否能达到设计目标,必须对接头螺栓进行验算.因为使结构计算偏于安全,对工字梁采用了如图2(a)的计算简图,此时,固端弯矩为0,与实际情况不符.根据要求,为保证接头的安全性,对螺栓进行验算时采取工字梁两端固定,并对计算弯矩值采取0.85的系数折减.本工程中梁与初衬或中隔撑接头处采用2×2个M22螺栓连接,计算结果如图8所示.
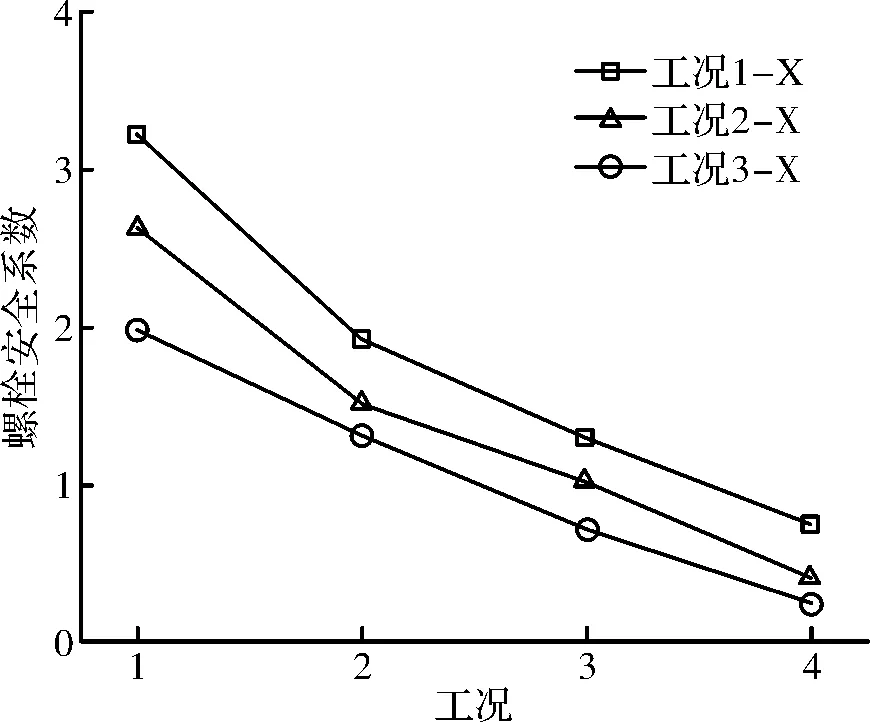
图8 螺栓安全系数Fig.8 Safety co-efficient of bolt
由图8,临时仰拱的长度和机器人荷载均对接头螺栓的安全性起控制作用.在工况1-1至工况1-4中,临时仰拱的长度保持不变,机器人荷载逐渐增加,当达到工况1-4时,螺栓安全系数为0.76,由接头处螺栓失效开始,整个结构会迅速垮塌,工程安全与经济会造成极大影响.若荷载不变,跨度增加,则由机器人荷载引起的接头弯矩不断增大,则螺栓的安全系数不断降低.以工况1-3、2-3、3-3为例,荷载设计值为16.11 kN,跨度分别为5.7 m、6.8 m、8.0 m,而螺栓的安全系数由1.30减小为1.02、0.73.可以发现,在工况3-3,临时仰拱跨度为8.0m时,安全系数小于1.0,结构失效.因此,就临时仰拱的安全性而言,无论是其跨度的增加或是荷载的增加,都有必要对接头处螺栓进行强度校核.若安全系数达不到要求,必须对螺栓的尺寸及布置重新予以设计来保证整体结构的安全性.
4 不同工况下数值分析
4.1 工程概况
西安地铁四号线火车站站项目分两期建设:一期为隧道暗挖施工,二期为车站明挖施工.火车站站两条暗挖隧道下穿西安火车站站场东咽喉区,对施工地表沉降变形控制要求极高,再加上火车站站正线隧道长,地质为粉质粘土,地下水位线为5 m,隧道埋深仅10.5 m,地质条件复杂.此外,车站南端竖井施工作业场地由于拆迁工作滞后,已严重影响四号线总体工程筹划.为在规定时间内保质保量完成施工任务,该项目首次引进机器人开挖作业,也是国内首次在地下工程建设中引进智能机器人挖掘作业.
4.2 模型建立及参数取值
根据工程实际情况,选择工况1-1至工况1-4进行数值分析对比.模型上边界自由,下边界约束竖向位移,左右边界约束水平向位移,如图9所示.
隧道土体和开挖部分用实体单元模拟,临时仰拱及中隔撑采用梁单元.初期支护采用壳单元,二次衬砌作为长期安全储备,计算时不予考虑.土体假设为理想弹塑性材料,采用Druck-Prager屈服准则.计算参数如表3所示.
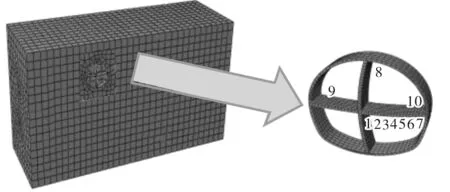
图9 有限元计算模型与监测点布置图Fig.9 Numerical model and layout of monitoring points
4.3 数值结果与讨论
数值模拟中,分别对临时仰拱的变形、拱顶沉降以及隧道收敛进行监测.
工字梁7个监测点(见图9)的竖向位移见图10.工字梁由两端向中心处的竖向位移逐渐增大.工况1-1和工况1-2时,两端监测点1和7的竖向位移出现负值,也就是梁端上翘的情况.根据分析,在隧道开挖过程中,初始应力场存在应力释放的过程,但在施工中不可能使应力完全释放后再施加衬砌,会造成围岩过大的变形量,则在初期支护完成后,形成二次应力场.那么,就会存在周围土体对衬砌的挤压作用,而临时仰拱对衬砌的稳定具有重要作用,从而导致临时仰拱在未加荷载时就已存在轴力(压力),而梁与初衬的连接并非完全刚性,且衬砌在压力作用下也会发生变形,这就导致了数值分析结果中出现梁端上翘的情况.
与静力计算的结果对比,图10中各工况下最大竖向位移偏小.静力计算的结果均是考虑最不利情况下的组合效应,故计算结果大于数值分析的结果.另一方面,如上述分析,临时仰拱在未加荷载时就已存在轴力(压力),轴力的存在会有效减小梁的竖向位移.数值计算结果(图11)和现场监测数据表明,临时仰拱在控制拱顶沉降方面的效果并不是很理想.其原因是临时仰拱的自重是由初期支护承受,使初期支护在竖直方向收到向下的力,与围岩对初期支护的力形成双重效应,而导致拱顶下沉控制效果不是很理想.工况1-4的拱顶沉降值最大,可以认为包括临时仰拱自重在内的荷载对于拱顶沉降会产生一定影响.
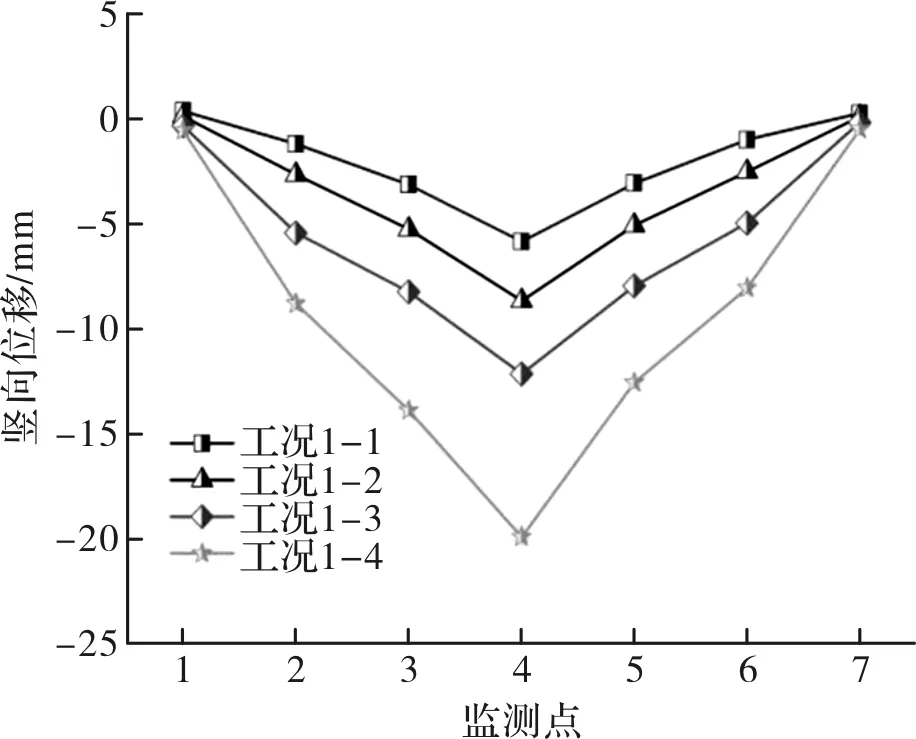
图10 工字梁监测点竖向位移Fig.10 Vertical displacement of monitoring points of I-beam
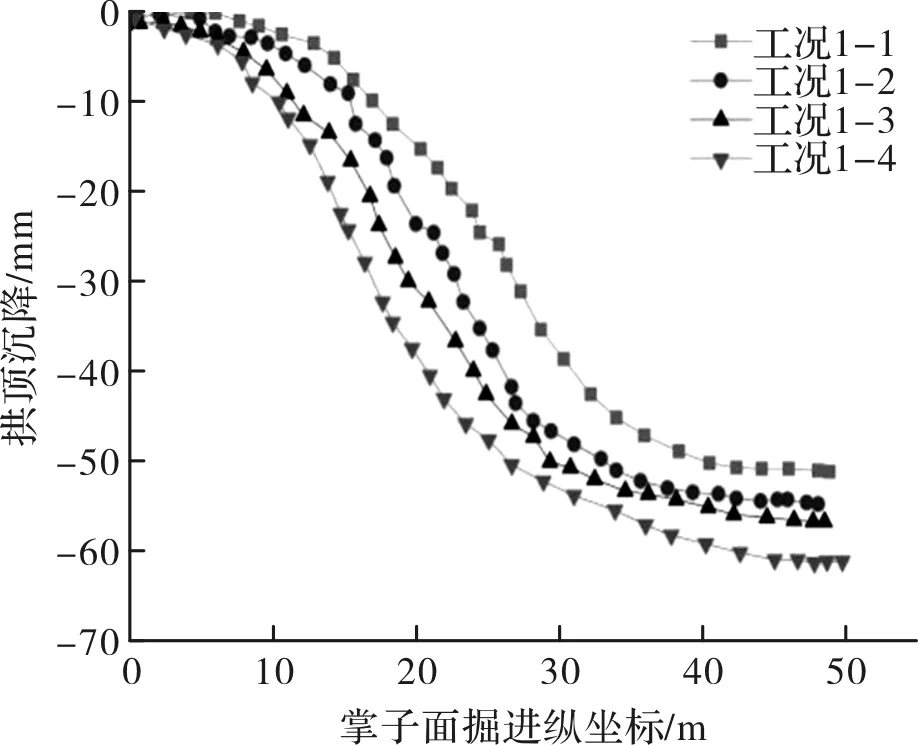
图11 隧道拱顶沉降Fig.11 Tunnel crown settlement
图12为数值分析得出的隧道周边收敛值曲线.临时仰拱对于洞室的水平收敛具有显著作用.随着机器人荷载增加,隧道周边收敛值也是逐渐增大的.因此,对于需要严格控制变形量的工程,机器人荷载需要控制在一定范围内.
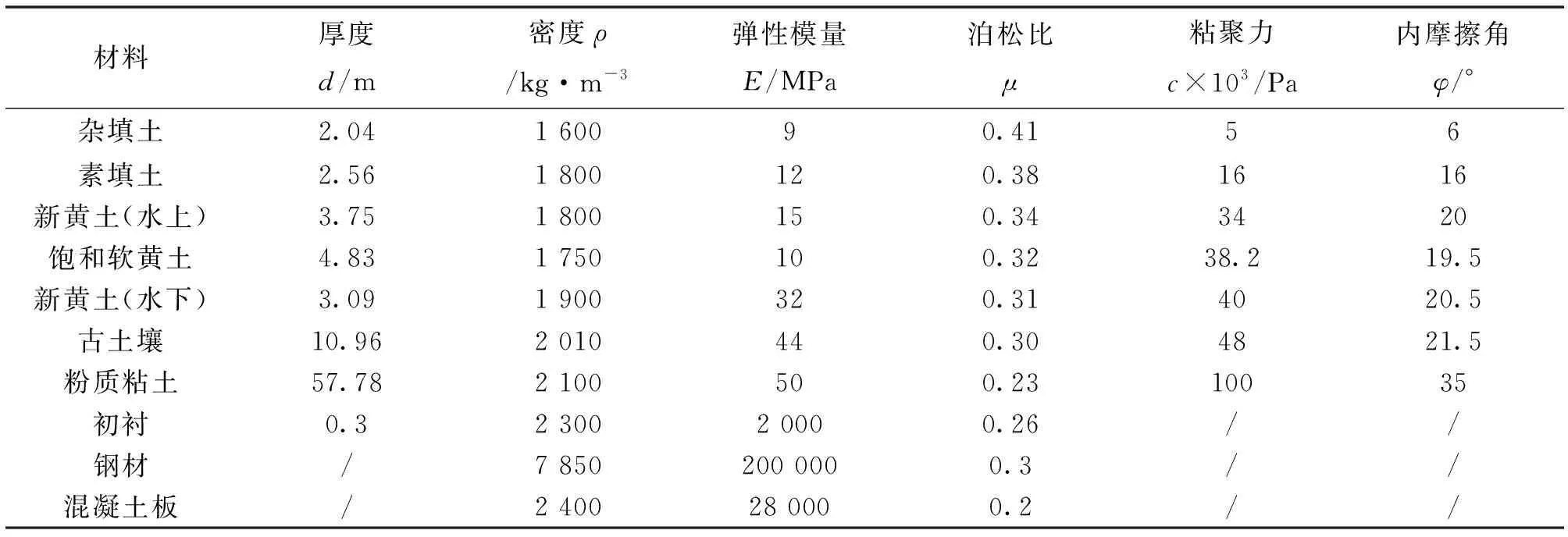
表3 计算参数Tab.3 Computation parameters
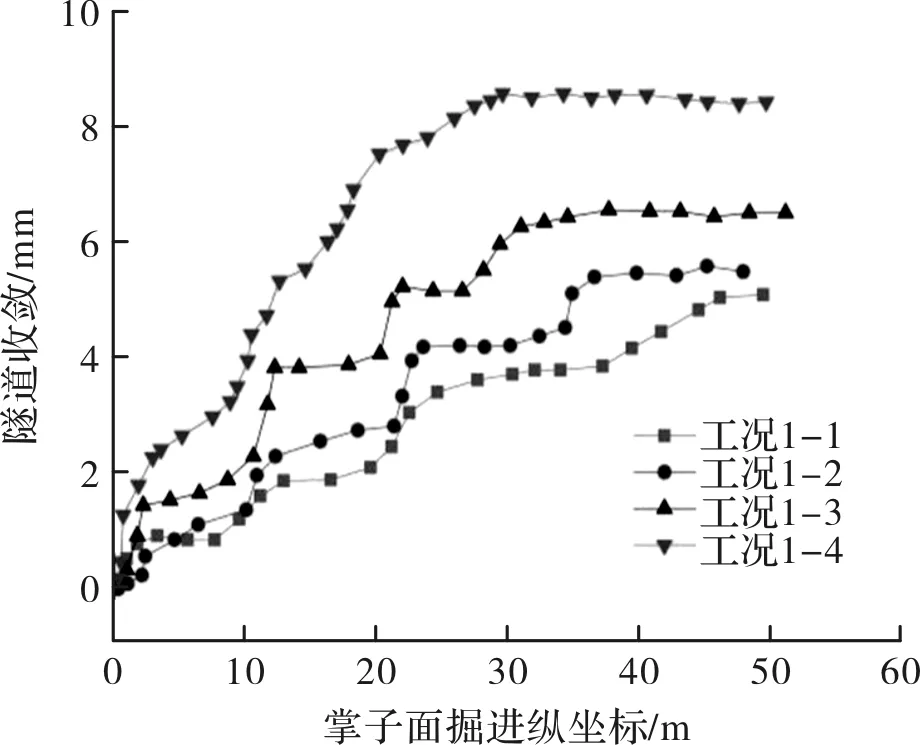
图12 隧道周边收敛Fig.12 Peripheral convergence
5 结论
(1)智能机器人荷载对临时仰拱的安全性起控制作用.若开挖过程中引入小型机器人,因其荷载不大,现有的临时仰拱施工方案满足安全要求.但若为了加快进度,使用大型机器人则必须对临时仰拱的安全性进行校核.
(2)不同的隧道开挖方案临时仰拱的跨度不同,在智能机器人荷载一定时,临时仰拱的跨度也会对其安全性起控制作用.本工程中临时仰拱的跨度较小,安全性能够得到满足.
(3)为了提高临时仰拱的安全系数,本文提出了增大工字钢截面,提高钢材、混凝土强度等级,加密加粗混凝土板底部构造筋,加设上部支座负筋,或者采取建筑结构中的加固方法铺设临时钢板等有效措施.
(4)数值模拟结果表明临时仰拱的受力情况对隧道的拱顶沉降与断面收敛也产生影响.为了将变形控制在一定范围内,必须对临时仰拱予以分析.
猜你喜欢
航空发动机(2021年1期)2021-05-22 01:20:38
客车技术与研究(2021年2期)2021-04-23 01:10:22
设备管理与维修(2020年4期)2020-03-03 13:10:34
城市道桥与防洪(2019年5期)2019-06-26 00:55:58
西南交通大学学报(2018年5期)2018-11-08 10:58:10
石家庄铁路职业技术学院学报(2018年2期)2018-07-12 08:36:30
汽车实用技术(2017年22期)2017-12-11 01:07:50
中国公路(2017年11期)2017-07-31 17:56:31
水利科技与经济(2017年9期)2017-04-22 02:42:54
水利科技与经济(2017年8期)2017-04-22 02:41:08