
基于V2X的车辆组队的通信管理系统研究
2018-12-01 01:04纪明君陈新李彪
汽车与驾驶维修(维修版) 2018年11期
纪明君、陈新、李彪
(北京汽车研究总院 101300)
0 引言
汽车已经成为人们生产和生活的必需品,但由于能源价格持续上升、交通压力不断增加和环境污染日益严重等因素影响,以及人们对汽车驾驶安全性、舒适性和经济性要求不断升高的共同作用下,积极开发并使用基于V2X的车辆组队通信管理系统,已经成为车辆领域不可避免的发展方向[1]。
1 车辆组队的车间通信技术现状
车辆组队的车间通信系统功能,是利用车间通信设备实现车队内部通信,通过车辆位置和状态信息的传输与共享,为决策、规划和控制提供必要信息,实现近距离的车辆编队行驶。此外,车间通信子系统需要实现车辆编队的管理,包括创建车队、解散车队、车辆入队和车辆出队等状态的切换,使得整个车队步调一致,协调运行。
1.1 主流技术方案内容
当前车辆组队的车间通信技术方案,主要利用无线通信设备建立车载自组织网络,实现车队内部通信,以保证车队内车辆位置和状态信息的共享。针对车队内的每个节点,需要获取以自身为中心的附近车辆状态信息,为车辆决策提供信息支撑。对于引导车,需要掌握车队的实时状态信息,为车队决策提供依据[2]。本软件采集车辆的位置和状态信息,进行实时显示并对外发布,为引导车提供车队管理功能,为跟随车提供入队申请和故障报告等功能。
1.2 主流技术方案存在的问题
目前基于自动驾驶的车辆组队技术尚处于预研发阶段,预期采用“领航车辆+跟随车辆”模式。领航车辆主要由人工驾驶,传感器负责辅助驾驶;跟随车辆完全为无人驾驶。智能技术采用激光雷达和摄像头等,网联技术采用无线通信系统,实现数据共享协同控制。涉及到车规及标准问题,目前车辆组队采用的数据通信控制单元还停留在测试实验阶段,整个通信管理控制单元还没有达到实际量产标准。
2 基于V2X的车辆组队通信管理系统架构
2.1 车间通信网络的构建
车间通信网络采用DSRC(Dedicated Short Range Communication)设备组建车间网,实现数据交互。现阶段车载专用短程通信设备使用的是5.9 GHz微波专用短程通信(DSRC)技术,工作在5.8~5.9 GHz频段,且工作频率可调,通过以太网RJ45接口与工控机连接,并利用UDP协议实现数据收发。编队车辆通过表示不同命令的数据包传输实现信息交互,在DSRC设备的通信覆盖范围内,单个节点能够接收到所有节点的信息。数据在车队节点间传输时,其通信系统运行流程如图1所示。
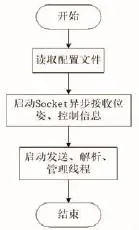
图1 通信系统运行流程
2.2 V2I和V2V技术的运用
车队内部车辆与路测设备之间通过V2I(汽车对基础设施)通信,可实现限速预警、限高预警、红绿灯预警、道路施工提醒以及基于信号灯的车速引导等应用场景。车队内部车辆之间的V2V(汽车对汽车)通信,可实现车队创建、车队巡航、队外车辆加入、队内车辆离开、车队拆分、车队融合以及车队解散等应用场景[3]。其中V2I作为可选项,可通过传感器或其他方式来实现其功能。
2.3 主要通信管理系统控制单元
车载控制单元:包括核心处理控制器、前向中长距毫米波雷达、侧后方短距毫米波雷达、前置双目摄像头、一组V2X/4G/GNSS天线以及车辆控制相关的元件。
定位控制单元:RTK(载波相位差分技术)高精度定位,系统通过网络获取CORS基站的位置矫正信息,再通过4G网络转发该信息到车辆搭载的GNSS控制单元。在车载GNSS控制单元进行实时求差解算坐标,并得到最终的位置信息,定位精度可达到厘米级。
控制单元:控制车辆的纵向、横向移动。
决策控制单元:通过前车轨迹信息、自车信息进行速度与专项决策。
2.4 车辆组队方式
车辆在数据传输前需要车辆组队,根据车辆的位置信息将车辆组成有序的车队。车队运行过程共包含3种状态,分别为车队组建、车队运行和车队解散。其组队过程中,首先由领航车发出组队邀请,邀请目标自动选定距离最近的跟随车;当车队组建完成后,可以通过车队路由对车队运行进行控制,并保障车队正常运行;车队解散指令即可在车队运行后执行[4],也可以在车队组建后尚未运行前执行。具体车队状态变迁图如图2所示。
3 技术方案验证
3.1 技术方案优势
利用V2X通信控制单元对车辆组队进行通信管理,可极大提高系统的稳定性。本系统实现了对车队的动态管理,包括创建车队、解散车队、车辆入队和车辆离队等状态的切换,使得整个车队步调一致,协调运行。其次,车辆组队是未来智能交通重要研究方向,车辆组队后,可减小车辆之间的距离,从而降低风阻、较少燃料消耗和废气排放,降低卡车等商用车运营成本。同时增加道路的利用率,提高道路的通行效率。最后,对于车辆驾驶员来讲,可提高驾驶舒适性,不需要全神关注路面情况,行驶中有空闲时间进行娱乐、休息和工作。车队内车辆之间相对速度较小,碰撞时冲量也较小,智能传感器反应速度比人的反应速度更快,车辆行驶将更加安全。
3.2 实际运行效果
基于V2X车辆组队通信管理系统的技术方案,提供了车辆组队与信息传递的功能,保证了车辆组队信息的采集、传输以及车队的管理,为车辆组队提供了保障[5]。在实际进行的三辆车组队测试过程中,可以做到在时速不超过50 km/h的情况下,车队中车与车之间的距离可以控制在15 m之内,已初步满足了车辆组队的需求。
4 结束语
车辆组队在降低燃料消耗及环境污染、缓解道路交通压力、提升驾驶安全性和舒适性等方面具有明显优势,也是未来车辆发展的趋势。因此,这种基于V2X的车辆组队通信管理系统的成功研发,可在一定程度上加快推动社会的发展和进步。
领航车在车辆组队中起到核心控制的作用,负责向跟随车发送相关组队邀请,并控制和审批跟随车的入队申请。而跟随车仅能接受来自领航车的组队邀请,并判断是否入队,若入队则向领航车发送入队申请。根据车辆组队,按照领航车与跟随车角色的不同,二者具体组队流程如图3所示。
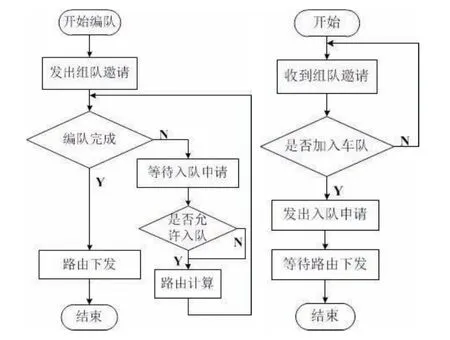
图3 车队组队流程(左图为领航车,右图为跟随车)
猜你喜欢
音乐天地(音乐创作版)(2022年3期)2022-06-14
少先队活动(2022年5期)2022-06-06
娘子关(2022年1期)2022-03-02
华人时刊(2021年13期)2021-11-27
少先队活动(2021年4期)2021-07-23
歌海(2020年5期)2020-11-16
少先队活动(2018年5期)2018-12-29
科学之谜(2018年11期)2018-12-05
小学生学习指导(低年级)(2018年10期)2018-10-13
共产党员(辽宁)(2017年15期)2017-11-24
