基于SLFNs插值指纹粒子滤波的共享单车跟踪算法*
2018-11-28 02:12:46张栋梁海本斋
传感器与微系统 2018年12期
张栋梁, 曲 豪, 海本斋
(1.河南广播电视大学,河南 郑州 450008;2.河南师范大学 计算机与信息工程学院,河南 新乡 453007)
0 引 言
自2015年开始,共享单车逐渐在我国各线城市中得到覆盖,到2016年底,我国共享单车保有量达到了1 923万辆[1]。共享单车管理过程中,共享单车的定位跟踪是需要考虑的主要问题[2]。因为共享单车的出现时间较晚,对于共享单车的定位研究较少[3]。
在现有定位算法中,指纹和惯性测量相结合后的结果是平滑的、自校准的,但由于指纹算法需要假设唯一的指纹,所以精度仍然受到限制。实际应用中,由于多径效应和接入点位置的安排,两个遥远的参考点可以共享非常相似的指纹[4]。因此,模式识别算法不能保证正确的估计。不准确的位置估计会降低整体性能。同时,初始化粒子滤波(particle filtering,PF)所需的时间也是一个重要因素。全局初始化收敛速度较慢。在入口处部署额外的硬件增加了总成本。
本文对PF的改进有两个主要贡献:1)基于随机一致性抽样(random consistency sampling,RANSAC)方法得到从WiFi指纹在初始化阶段消除不准确的估计[5,6]。与全局初始化相比,其需要更少的迭代收敛。算法选择正确的估计,从指纹的行人航迹推算(pedestrian dead reckoning,PDR)数据建立了高斯模型。利用内点估计初始位置。2)为了克服初始化估计错误问题,通过单隐含层前馈网络(single hidden layer feedforward networks,SLFNs)插值对传统的PF加权模型的多个指纹概率进行分析[7]。考虑了不同的参考点WiFi指纹算法的概率,以尽量减少错误所带来的类似的指纹问题[8]。
1 基于RANSAC加权粒子滤波的定位算法
1.1 共享单车定位问题描述
基于粒子滤波的共享单车定位问题是对于时刻t查找共享单车轨迹v1:t的联合后验p(v1:t|z1:t,u1:t,m)。在该问题中,z1:t=z1,z2,…,zt为观测值,u1:t=u1,u2,…,ut为运动的里程计测量[9]。地图m在系统中通常已知。通常由惯性测量单元(inertial measurement unit,IMU)模块获得运动里程测量值。PDR是实现人类导航的常用方法。有多种方法获得观测结果,包括激光测距仪、红外、WiFi指纹等。本文主要集中于WiFi指纹的解决方案。
如图1所示,系统的输入包括WiFi RSSI扫描和IMU读数。对传统粒子滤波算法进行了两个重大改进。首先,将RANSAC初始化过程引入到系统[10,11]。需要对WiFi模块进行多次扫描,并使用PDR算法生成轨迹模型。过滤掉所有的异常点的轨迹并保持正确的初始化,以提高PF的收敛速度和精度。在正常采样阶段,引入了一种改进的重要性加权法。该阶段最初收集多个指纹估计的概率。用模型拟合算法构造高斯混合模型。每个粒子从构造模型中进行权重获取。最终进行基于权值的粒子重采样,并计算新粒子的位置均值。
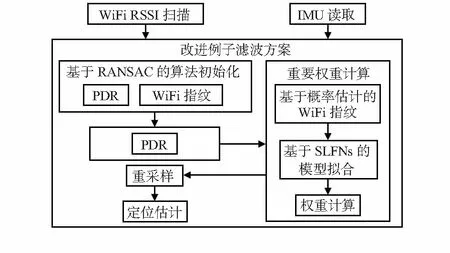
图1 初始相位和改进加权粒子滤波方案
1.2 基于RANSAC的初始化

算法基于一致随机抽样的初始化过程
输入:指纹估计数据ψ、PDR模型MPDR、最大迭代数N、满足模型的最小数据点min、模型公差因子E、内部阈值Ith。

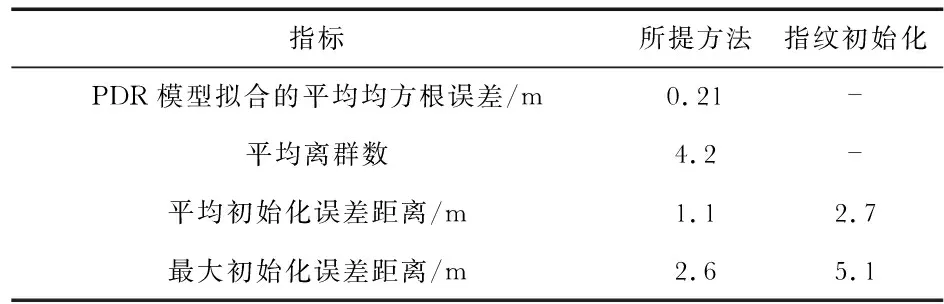
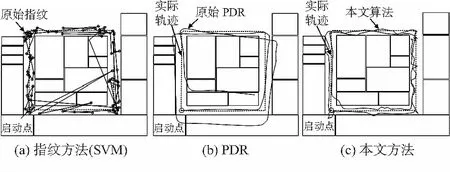
1)whileiterations 8)end if 9)end for 12)end if 13)end while 为了构造PDR模型,首先执行c迭代的PDR算法。对于每一次迭代,用户的相对位置可以通过以下方式计算 (1) (xi+1,yi+1)=(xi+Lisinφi,yi+Licosφi) (2) 式中xi和yi为坐标,Li和φi为第i步的步幅和方向。利用高斯最小二乘拟合方法对高斯模型G(x)进行拟合。结合本文模型,将函数移到地图上的任意位置,利用(x′,y′)的2组系数对初始点进行估计,有 (3) (4) 式中Distance(d;MPDR(x,y))为实例和模型之间的距离。并在曲线(xo,yo)上选择最接近点o。最终计算距离为 Distance(d;MaPDR(x,y))= (5) 式中C为d到两个端点距离的最小值。 RANSAC可将评价问题作为一个优化问题归结为 (6) (7) (8) (9) (10) 图2 SLFNs插值算法框架 在实际应用中使用插值算法,建议使用极限学习机(extreme learning machine,ELM)算法,主要优点是:1)学习速度非常快,训练时间在毫秒(ms)范围。2)ELM网络支持训练集的任何小训练误差,而隐藏的神经元不大于训练样本的数量。 收集PDR数据和指纹数据。实验在人们进入共享单车跟踪场景时进行,RSSI样本受环境因素的影响,如移动物体和人。因此,基于接收信号强度指示(received signal strength indication,RSSI)指纹的方法受到多径效应和运动目标的显著影响,这与实际场景相似。PDR算法在手机上实现,使用IMU收集的数据。应用这些数据测试所提出的PF方案的初始化阶段和估计精度。对于指纹算法,在30 m×35 m范围内选择了84个参考点。在每个参考点收集了30个指纹。选择了支持向量机和概率估计算法作为对比算法。 为了测试所提出的初始化方法,在10个不同轨道上不同位置的初始条件下收集了10个数据集。每个初始数据集包括11个步骤和11个WiFi扫描。首先研究每个数据集上的高斯模型拟合。PF在所获取的模型的当前位置初始化。实验的模拟结果如表1。 表1 初始化实验结果 PDR模型拟合误差用于检验模型的精度,结果表明:平均误差为0.21 m。数量的异常值论证了RANSAC方法的有效性。本实验中,该方法平均滤除了4.2个离群值。初始化误差距离和最大误差距离说明初始化的准确性。作为比较算法,选择基于K最近邻(K-nearest neighbor,KNN)的指纹初始化。该方法将平均误差距离减小1.6 m,减小最大误差距离2.6 m。为提高收敛速度,该方法只需要这11个迭代过程进行模型拟合和RANSAC算法。作为比较,全局初始化需要平均19.1次迭代才能收敛。 实验中,所有的算法均使用相同的指纹数据库和相同的PDR数据。图3(a)给出了用原始指纹法估计的共享单车轨迹。利用红线连接进行连续估计。可以看出:结果受到不一致的观察和估计。在某些情况下,由于缺失值、噪声数据或指纹的相似性,连续估计的彼此距离较远。图3(b)给出了来自原始PDR的轨迹。图中,每个点代表一个步骤。方法在前3个走廊表现良好,但是积累了大量的错误。图3(c)给出本文方法的轨迹,结合了指纹和PDR的信息。实验结果表明,本文算法对含噪指纹数据和PDR数据进行了修正,提高了最终性能。 图3 跟踪轨迹 如表2所示,本文方法与SVM和概率算法的平均误差距离分别为1.2 m和1.3 m。这个值较PDR值低1 m,利用经典高斯加权法融合PF的概率方法。在最大误差距离方面也有很大改进。 表2 不同方法的误差距离 本文提出一种基于SLFNs插值指纹粒子滤波的共享单车跟踪算法,利用惯性传感器进行数据测量,并提出了一种新的PF方案,产生平稳和稳定的局部化知识。同时利用随机一致性抽样进行算法初始化,以减少收敛时间。实验结果验证了本文算法性能优势。

1.3 模型生成

1.4 模型评价
1.5 利用SLFNs插值的指纹概率建模





2 实验分析
2.1 初始化实验阶段
2.2 PF方案测试实验

3 结束语
猜你喜欢
意林彩版(2022年1期)2022-05-03 10:25:07
小哥白尼(趣味科学)(2021年11期)2021-02-28 08:35:00
小天使·一年级语数英综合(2020年10期)2020-12-16 02:57:11
读友·少年文学(清雅版)(2020年1期)2020-05-20 08:47:24
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
领导决策信息(2017年9期)2017-05-04 04:04:50
岷峨诗稿(2017年4期)2017-04-20 06:26:34
自动化学报(2016年8期)2016-04-16 03:39:00
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48