乘性噪声干扰下基于交互多模型的目标跟踪*
2018-11-28 02:18:40廖书伟
传感器与微系统 2018年12期
廖书伟, 刘 巍
(河南理工大学 电气工程与自动化学院,河南 焦作 454000)
0 引 言
随着现代航空航天技术的飞速发展,目标运动的实时性跟踪越来越受关注。对各式各样的飞行器的航速和机动性能的要求也越来越高。当目标突然实施机动(突然转弯或加、减速等),只采用一个模型很难描述目标的运动情况[1,2]。因此,Blom和Bar-shalom在广义伪贝叶斯算法[3,4]的基础上,提出了交互多模型算法(interacting multiple model,IMM)[5,6]。交互多模型算法是目标多模型运动的常用算法之一,可尽可能真实地反映目标的实际运动情况[7,8]。然而,经典的IMM算法没有考虑受乘性噪声的影响,因此本文提出受乘性噪声干扰的IMM算法对目标运动的影响并验证。
IMM算法被广泛应用于许多不同的领域,如文献[9]运用IMM算法跟踪机动目标,研究结果表明用IMM算法跟踪机动目标模型(特别是加速度较大)有明显的优势,文献[10]研究多通道交互多模型跟踪人体运动,进一步延展了IMM算法的应用。文献[11]通过IMM算法得到其派生算法,并用于跳跃马尔可夫线性系统的风险滤波问题。文献[12]提出IMM-卡尔曼滤波(Kalman filtering,KF)算法,该算法运用于目标跟踪具有较好的跟踪精度和稳定性。文献[13]结合粒子滤波和IMM算法,应用于高速高机动目标的跟踪,提高了对非线性系统下不确定情况的滤波性能,从而也优化了跟踪精度。文献[14]结合无迹KF和IMM算法,提出了一种自适应调整“当前”统计模型的计算方法,提高了运动模式的匹配概率,改进了跟踪效果。然而,上述文献仍没有考虑乘性噪声的影响。
乘性噪声一般是由信道不理想引起的,其与信号是相乘的关系。如传输信号经过电离层信道时的衰退或反射以及信号的采样、选通、调制等[15]。文献[16,17]研究的系统中,加性测量噪声为有色噪声,所得递归滤波算法较不考虑乘性噪声有更好的性能。文献[18]研究了受有色乘性噪声干扰的线性离散系统的最优状态估计。文献[19]研究了受乘性噪声的干扰,马尔可夫参数部分未知的线性系统的状态估计问题,并验证考虑乘性噪声情况下较不考虑乘性噪声的性能提高明显。在实际应用中,因忽略乘性噪声的影响,而导致性能严重的下降。因此,研究乘性噪声干扰下的IMM算法很有必要。
在本文中,目标运动的测量方程中含有乘性噪声,通过联合使用有乘性噪声的Kalman滤波器[20]和IMM算法,得到一个针对乘性噪声环境下的IMM算法,并验证考虑乘性噪声的IMM算法优于经典的IMM算法,且能较准确地反映目标的实际运动情况。
1 乘性噪声干扰下的KF
考虑如下系统
x(k+1)=A(k)x(k)+ω(k)
(1)

(2)
式中x(k)∈Rn为未知的状态向量,ω(k)∈Rn为加性过程噪声,ζμ,k∈Rn×n为乘性噪声,y(k)∈Rp为输出向量,v(k)∈Rp为加性测量噪声,A(k),C(k),μ,k为适当维数的矩阵。
假设系统满足条件如下:
1)关于系统状态噪声ω(k)和观测噪声v(k)满足:均值都为零,方差分别为Q(k),R(k) ,且ω(k),v(k)相互独立。

因量测值yi(i=1,2,…,k)含有乘性噪声ζμ,k,令yk[yT(0),yT(1),yT(2),…,yT(k)]T,令Y=y时X的线性最小均方误差估计与相应的最小均方误差估计相等,即[X|Y=y]=E[X|Y=y]。
a.预测估计

(3)
b.预测误差协方差
P(k|k-1)=A(k-1)P(k-1|k-1)AT(k-1)+
Q(k-1)
(4)
c.新息


(5)
d.卡尔曼增益
N(k)=C(k)P(k|k-1)CT(k)+R(k)+

(6)
(7)
K(k)=P(k|k-1)CT(k)×N-1(k)
(8)
e.滤波

(9)
f.滤波协方差
P(k|k-1)=(I-K(k)C(k))P(k|k-1)
(10)
将上述含有乘性噪声的卡尔曼滤波算法应用于经典的IMM算法。
2 乘性噪声干扰下的IMM算法
通过利用带有乘性噪声的KF及经典的IMM算法[6],得到乘性噪声干扰下的IMM算法,具体如下:
1)输入交互:设模型i转移到模型j的转移概率为pij,则马尔可夫链的转移概率矩阵如下
(11)
(12)

(13)

2)乘性噪声干扰下的IMM算法
对应第j个模型,0j(k-1|k-1),P0j(k-1|k-1)以及观测值Z(k)作为输出进行卡尔曼滤波,过程如下
(14)
预测误差协方差
(15)
卡尔曼增益
Kj(k)=Pj(k|k-1)CT×[CPj(k|k-1)CT+

(16)
(17)
滤波
Kj(k)[y(k)-Cj(k|k-1)]
(18)
滤波协方差
Pj(k|k)=(I-Kj(k)C)Pj(k|k-1)
(19)
式中I为单位阵。
3)模型概率更新
由似然函数更新模型概率μj(k),模型j的似然函数为
(20)
式中vj(k)=Z(k)-Cj(k|k-1),Sj(k)=CPj(k|k-1)CT=R(k)
所以,模型j的概率为
(21)

4)交互输出
总的状态估计
(22)
总的协方差估计
(23)

由于经典的IMM算法没有考虑乘性噪声的影响,当实际系统受乘性噪声干扰时,性能下降严重,且现有的基于多模型的目标跟踪的算法[4,5,21,22]很少考虑乘性噪声的影响。因此,为了提高实际系统目标跟踪的估计性能,本文提出了一个受乘性噪声干扰的IMM算法。
3 目标运动模型及仿真分析
3.1 状态方程和量测方程
设状态向量为


则状态方程为
Xk=AiXk-1+BiWk-1,i=1,2,3
(24)
目标运动的测量方程
(25)

对于上述问题,采用三个模型,第一个模型是非机动模型;第二、三模型为机动模型。控制模型的马尔可夫链的转移概率矩阵为

且各模型的概率为μ1=0.8,μ2=0.1,μ3=0.1。
3.2 恒速模型(非机动模型)
当非机动目标做匀速直线运动时,状态方程为
Xk=A1Xk-1+B1W
(26)
其中,系统的扰动噪声均为零均值、方差为Q=0.001I4×4,T=2 s为采样周期,总的采样点数为N=800/T
(27)
3.3 恒加速模型(机动模型)
Xk=A2Xk-1+B2W,
(28)
Xk=A3Xk-1+B3W
A3=
(29)

定义滤波误差的均值
(30)
定义滤波误差的标准差
(31)
式中M=50为蒙特卡洛仿真次数。
采用两点起始法,求得初始状态为
(32)
3.4 仿真分析
目标运动的真实轨迹如图1所示。图2~图4分别给出了所提出的乘性噪声干扰下的IMM算法与经典的IMM算法这两种方法的仿真比较结果。

图1 目标运动的真实轨迹
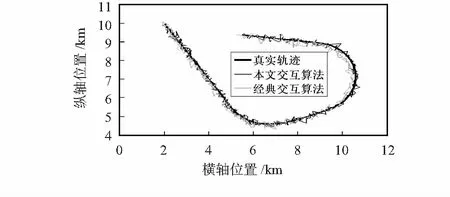
图2 目标运动的滤波轨迹

图3 x方向滤波误差的均值

图4 x方向滤波误差标准差
图2可以看出,前者滤波轨迹比后者滤波轨迹要更接近真实轨迹,且在转弯机动时使用联合乘性噪声的IMM算法比经典的IMM算法的实时跟踪更精确,效果更好。
图3、图4分别为由蒙特卡洛仿真计算得到的滤波误差均值曲线和标准差曲线,可以看出,由于有两次转弯,在转弯的前后误差的均值有较大的波动。随后在目标运动的轨迹变为匀速运动时,随着时间的推移,误差均值再次在零值附近有较小的波动。
由于x方向和y方向相同,仿真结果相类似,因此在结果分析中只分析了x方向的结果。
4 结 论
本文得到在乘性噪声环境下的IMM算法,通过对目标运动的建模及仿真分析,可以看出针对乘性噪声环境的IMM算法较经典的IMM算法能更有效地提高目标的稳定性和定位的准确性。仿真结果表明了考虑乘性噪声干扰下IMM算法的必要性。
猜你喜欢
湖南理工学院学报(自然科学版)(2023年3期)2023-06-07 07:49:00
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16 05:32:56
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
自动化学报(2016年8期)2016-04-16 03:38:55
无线电通信技术(2015年3期)2015-12-23 11:37:00
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28 12:21:31
电子设计工程(2014年20期)2014-02-27 12:01:00
中国科学技术大学学报(2013年8期)2013-03-11 20:18:37