
深潜救生艇的紧急信息传递装置设计
2018-11-28 09:07,
计算机测量与控制 2018年11期
,
(1.中国人民解放军 92213部队,广东 湛江 524064; 2.哈尔滨工程大学 自动化学院,哈尔滨 150001)
0 引言
随着海洋的逐步开发,人类的脚步渐渐迈进深海,但是由于深海环境的复杂性,各种海洋事故频发。深潜救生艇作为对深海设备及人员进行救援的主要设备,应用越来越广泛[1-3]。由于深潜救生艇工作在水下几百米的深度,遇到紧急情况需要大量紧急信息传递时,单靠声纳是明显不足的。因此,设计一种用于深潜救生艇紧急信息传递的装置势在必行。
要实现无人机的潜射工作,一般分为两种发射方式:干式发射方式、湿式发射方式[4]。
其中干式发射方式较为普遍[5];无人机放入到特种运载器的密封运载舱内,在水下特种运载器过程中无人机不与水接触,在整个弹射过程中无人机也是处在干燥的环境中的;这种潜射方式不用考虑无人机的防水密封问题,因此也降低了对于新的防水无人机的研发成本[6]。
而湿式发射方式由于没有密封防水的特种运载器,无人机在水中点火发射,这样就需要考虑无人机的防水问题以及水中点火的技术难题;这一种方法比较复杂不太适合于深潜救生艇发射无人机[7]。
美国洛克希勒·马丁公司研制出了第一架适合于潜射的无人机“海上搜寻者”;这种无人机的机翼可以折叠起来,放入到潜水艇的鱼雷发射管内,并加装相应的发射机构,实现利用鱼雷发射管发射无人机。“海上搜寻者”上携带着各种侦查类传感器,可以实现对海面侦查与目标的搜寻;当潜艇把天线伸出水面,通过无线电通信无人机就可以实时把水面情况传输给潜艇,同时“海上搜寻者”还可以携带10 kg以内的炸药,可以通过空中对目标进行打击。随后在“阿什维尔”号潜艇上进行了相应的科研工作,成功实现了设计目标。20世纪末,美国开始研制一种多用途的潜射无人机,经过洛马公司多年的研究,研制出了“鸬鹚”无人机,该无人机的发射方式是利用潜艇发射弹道导弹的2 110 mm发射管实现无人机的弹射,利用导弹发射管能够实现无人机在水面或者水下的发射任务,同时也能够实现无人机回收工作,保证了无人机的可重复使用。该无人机能够携带多种勘探与攻击装备,从而可以实现海上侦查与攻击任务。
参考了国内外许多设计思路,本文采用干式发射方式设计了一种的水下特种运载器。把无人机折叠好放入到一个专门的水下耐压筒子里面作为无人机从水下运送到水面空气中的特种运载器,解决了无人机从水下到空气中的过度问题;本文针对深潜救生艇需要紧急信息传递的情况所设计的潜射无人机的特种运载装置,能够保证无人机安全有效的发射至水面,进行信息传递。适用于深潜救生艇上搭载[8]。
1 特种运载器整体机构
图1所示为潜射无人机发射过程,展示了特种运载器与深潜救生艇分离、特种运载器自主航行到水面、保持好方向与角度、无人机与特种运载器分离、无人机飞向预定方向[9]。
图1 潜射无人机发射过程
本设计的特种运载器结构简图如图2所示。
图2 特种运载器整体结构简图
其中:1为矢量推进器;2为控制舱;3为弹射舱;4为折叠后的无人机;5为气囊;6为特种运载器本体;7为特种运载器端盖。
特种运载器整体主要分为两部分,艏端为密封的铝合金舱体,该舱体是不能进水的里面主要有折叠式无人机、无人机弹射装置、电池、检测与控制电路等。艉端为碳纤维制成的舱体,该舱体是可以进水的,里面主要安装有矢量推进器[10]。
根据所设计的无人机的发射条件,要求特种运载器到达水面后发射方向与水平面成72°夹角。运载器分为两种工作状态:水下航行、水面发射,因此特种运载器在水下航行时需浮力近似于重力;当到达水面以后浮力大于重力,剩余浮力可以抵消弹射无人机时产生的反向推力,防止海水进入舱体。通过多种方案的设计与论证,设计了一种弹出气囊的方案解决浮力调节和与水平面呈72°角的姿态问题。如图3所示,在特种运载器筒壁上设计一种与特种运载器轴向呈72°的环形气囊;当特种运载器到达水面后弹出气囊以增加特种运载器的浮力,同时随着气囊的展开,特种运载器发射筒漏出水面并与水面呈72°角,并保持运载器发射筒弹射前后的稳定性。
当特种运载器浮到水面,打开舱盖准备弹射无人机时,特种运载器艏部需露出水面一定的体积,防止海水流入到特种运载器舱内,同时在弹射无人机的过程中会产生一个后坐力,需要一定的浮力抵消这个力,此时特种运载器的浮力应该大于重力,且需要剩余浮力可以抵消弹射无人机时产生的后坐力,露出水面的高度不至于让海水流入到特种运载器中。这样特种运载器在水下时浮力等于重力,到达水面以后其浮力要求大于重力,因此需要设计调节特种运载器浮力的装置。结合以上两点弹射无人机要求,图3展示了特种运载器到达水面以后的姿态图。

图3 特种运载器上的环形气囊
特种运载器在流体中运行时主要受到流体对其的阻力,为了节约能源、增加特种运载器的灵活性和速度,需要对特种运载器壳体外形进行研究以减小特种运载器所受阻力;参考流体力学相关知识[11]得知,特种运载器外形呈流线型有利于减小与流体的阻力;参照水下无人航行器的外形设计,呈流向回转体的外形能够减小特种运载器阻力,同时由于回转体机械结构较为简单,加工时较为方便。
根据无人机折叠以后的体积大小和弹射装置的体积要求对特种运载器整体外形大小进行设计;无人机机身长度为4 500 mm,其横截面为470 mm*328.5 mm;无人机与特种运载器之间需要预留一定的间距,同时在特种运载器内壁上也设计有无人机弹射滑道;综合以上因素考虑特种运载器密闭舱体设计外径为533 mm。根据长度要求粗略估算特种运载器密封舱舱体长度,然后利用三维制图软件ProE画出密封舱舱体三维图,这里需要补充的是:为了满足耐压与弹射要求,密封舱舱体厚度为8 mm的铝合金;利用ProE软件可以算出密封舱外壁铝合金体积,铝合金密度为2 700 kg每立方米,由此可知密封舱重量。根据无人机满载荷重量大约为320 kg,弹射装置为200 kg,结合密封舱自身重量和体积要求,经过多次数值计算得出特种运载器密封舱合理长度为5 330 mm,这个长度可以满足以上两点设计要求,此时密封舱浮力略大于重力;对于浮心与重心的计算在后面的内容进行介绍。
为了得到运载器良好的水动力特性,设计了、鱼雷型(图4a)和圆柱UUV型(图4b)两种不同线型的外形结构,然后利用Fluent仿真软件进行相应的阻力计算;主要分为以下几个过程:建立三维模型、设定边界条件、划分网格、设定求解数学模型与湍流模型、设定控制参数和迭代次数、开始计算。

图4 两种不同线型结构的运载器简图
如图5为鱼雷型(图5a)和圆柱UUV型(图5b)特种运载器所受到的表面压差阻力分布云图,图6为鱼雷型(图6a)和圆柱UUV型(图6b)特种运载器表面摩擦阻力分布图。

图5 表面压差阻力分布云图
图6 摩擦阻力分布图
通过利用FLUENT对不同方案下阻力大小的计算,当航行速度为4节时,得到鱼雷型阻力大小为:压差阻力28.45 N, 摩擦阻力为72.13 N,总阻力100.58 N;圆柱UUV型阻力大小为:压差阻力18.96 N,摩擦阻力73.94 N,总阻力92.9 N。从阻力大小可以看出,圆柱UUV型结构阻力更小,因此,本文采用圆柱UUV型作为特种运载器线型。
2 特种运载器稳性设计
2.1 重心、浮心估算
特种运载器在水下航行时为保证运行姿态和稳性,对特种运载器重心与浮心位置提出以下要求:浮力近似等于重力且在一条直线上,同时特种运载器浮心应略高于重心以增加特种运载器的稳性。
首先建立坐标系(单位:m),坐标原点为特种运载器体心,水平面是XOY平面,艏向为OX轴,OZ轴垂直向下。特种运载器总重量是W,单位kg,每个元件的重量分别为Wi,单位kg,其中每个元件在上述坐标系中的重心坐标为(xi,yi,zi),那么特种运载器的总重量和重心坐标为:
(1)
(2)
式中,n为各个零部件的个数,特种运载器在水下运行时,姿态关于XOZ面与XOY面对称;把各零部件重量与重心坐标代入上式中,可得特种运载器的重心为(-0.734,0,0.113),单位m。
特种运载器的浮心计算是通过每个排开水的零部件所受到的浮力叠加而得到,依然在上面计算重心时设定的坐标下,假定特种运载器整体浮心是(xb,yb,zb),那么其浮心计算公式为:
(3)
由上式可得出特种运载器的浮心为(-0.214,0,0);根据上面重心计算结果可知,重心与浮心在OX轴上不重合,因此需要在特种运载器艉部非密封舱内加入一定量的浮力材料,同时在特种运载器艏部的舱盖内加入一定量的铅块,使重心与浮心在OX轴上保持重合。重心与浮心在OZ轴上的距离为0.113米,符合《船舶稳性规范》中浮心与重心的要求,达到稳性要求;当特种运载器在水下航行时能够保持稳定的姿态要求。
当特种运载器到达水面以后弹出气囊,整个特种运载器姿态发生了变化,浮心的位置也改变;根据船舶设计要求,浮心应高于重心至少15 cm;因此需要对气囊的大小和形状进行调整和计算。
2.2 初稳性计算
当特种运载器到达水面展开气囊后,特种运载器左右对称,但是前后并不对称;在海面容易受到风浪的干扰,影响弹射无人机对于特种运载器的姿态要求,因此需要对特种运载器的稳性进行计算、分析,下面对特种运载器的横稳心高和纵稳心高进行计算。如图7所示,当特种运载器产生一个小的横倾角时重心、浮心的变化。
图7 特种运载器的横向稳性
假设此时水平面为,特种运载器重心为G,浮心为B;当特种运载器受到海风、海浪的干扰时,在横向将产生一个小角度的倾斜角,水面则是,此时特种运载器的重心没有改变还是G,但是浮心发生了变化为,此时浮力作用线与特种运载器的中心轴线的交点是M,则点M为特种运载器的稳心。
由图7所示,当特种运载器产生倾角θ时,在重力与浮力的相互作用下产生一个恢复力矩M1,可以使特种运载器抗击干扰力恢复到平衡位置,该恢复力矩的大小为:
(4)

在计算特种运载器纵向初稳心高度时,方法与上面计算横向初稳心的方法一致,能够得出特种运载器纵向初稳心高度为0.56 m。
2.3 固有频率计算
在海面上,海浪的传播具有一定频率传播的,因此为了减小海浪对特种运载器的干扰,应使特种运载器的固有频率应避开海浪的主频率。根据《BUOY ENGEERING》对于船舶设计中介绍的固有频率的研究,可以套用船舶的计算公式如下:
(5)
(6)
(7)

特种运载器需要在3级海况能够完成预定的任务,其中3级海况下海浪主能量频率为2.62 rad/s,与上面特种运载器固有频率计算结果相比较可知,固有频率避开了海浪频率,因此本设计特种运载器具有一定的耐波性。
3 矢量推进器特性分析
为了对矢量推进器进行研究,建立如图8坐标系;假设特种运载器为刚体的,且海面平静,忽略风浪流的干扰[12]。
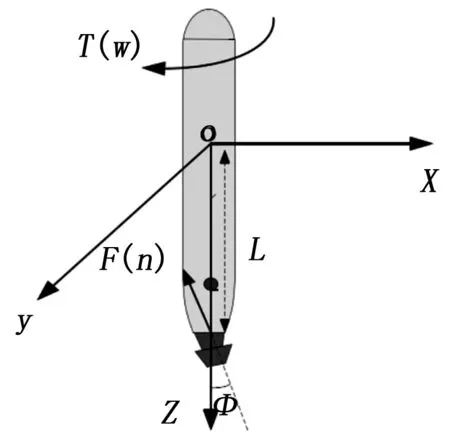
图8 矢量推进器转向受力分析图
根据特种运载器的受力情况,建立如下运动学方程和动力学方程:
F(n)·sinφ·L-T(ω)=Iβ
(8)
F(n)·cosφ-f(v)=ma
(9)
式中,F(n)是矢量推进器提供的总推力,单位N,F(n)与该推进器转速n有关;φ为推进器与特种运载器夹角,即偏转角,单位:°;L为主推进器产生的推力作用点到特种运载器重心的距离,单位m;T(ω)是受到的阻力力矩,单位N.m,其中ω是转向角速度,单位rad/s;I是对应的转动惯量,单位kg/m2,β是角加速度,单位rad/s2,f(v)是所受阻力[13],单位N。
推进器的推力是通过尾部的螺旋桨转动而提供的,由螺旋桨推进理论可知,矢量推进器提供的推力是:
F(n)=Ki(Jo)ρn2D4
(10)
式中,Ki为推进器的推力系数,ρ是流体密度,单位kg/m3,D是推进器桨叶的直径,单位m。
由势流理论可知,特种运载器受到的阻力为:
f(v)=0.5ρCdAv2
(11)
其中:Cd是特种运载器所受的阻力系数,A是特种运载器和流体接触的最大横截面积,单位m2。
根据上面对矢量推进器的分析与公式推导可知,转向力矩F(n)与特种运载器的航行速度v没有关系,航行速度不会影响转向力矩,这也是矢量推进器与普通使用舵的推进器的最大区别,矢量推进的特种运载器在速度较低时也能够有足够的力矩实现其转向,使特种运载器的运行更加灵活[14]〗。
当特种运载器到达水面以后其航行速度几乎为零,为了满足迎风发射的姿态需求,需要对特种运载器的艏向进行调节,此时普通推进器将不能有效的进行姿态调节,而矢量推进器的优点将显现出来;而且矢量推进器也更适合工作与狭小的空间,具有较好的操控性和避碰性。
4 控制电路设计
特种运载器硬件控制系统如图9所示,整个控制系统包括ARM控制电路,电流、电压信息采集电路,过流保护电路,漏水检测电路,爆炸螺栓控制电路,霍尔开关位置检测电路,RS232、RS422、CAN电平转换电路以及风速风向系统等。

图9 特种运载器控制系统组成
整体的主控制器选用三星公司生产的S3C2440A芯片[15],这个型号的芯片采用ARM920T内核,为32位的芯片,其主频最高可达400 MHz,而且片上资源丰富,而且其运算能力出众,具有较好的实时中断能力,功耗很低。使用Linux作为ARM的操作系统,有了Linux操作系统在程序设计时就可以实现多线程、多进程编程,简化了程序设计,提高了工作效率[16]。
陀螺仪采用荷兰Xsens公司生产的MTi-G,该陀螺仪集成了GPS,因此可以同时提供位置信息与姿态信息,而且该陀螺仪体积小、精度高、价格便宜,在以前的多个工程项目中使用过,可靠性可以保证。风速风向舵机依靠风速传感器和风向传感器所传递回来的信息,通过ARM计算机进行处理,得到所需要改变的舵角大小。
5 艏向改变仿真验证
为了消除特种运载器模型不确定与环境干扰对特种运载器艏向控制的影响,采用自适应模糊滑模控制方法;滑模控制的优点是当控制参数不决定时,可以很好的完成艏向控制,由于参数误差的影响,需要有较大的控制输入才能保证最后的控制性能,但是这样会使特种运载器的鲁棒性降低,这里引入自适应算法来提高控制性能,同时利用模糊算法对特种运载器动态系统中存在的非线性函数进行模糊逼近处理,从而对消除特种运载器模型不确定和环境干扰对特种运载器艏向控制的影响。
特种运载器艏向控制的动态方程为:
(12)
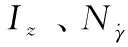

假设特种运载器初始位置的艏向角为0度,需要改变特种运载器的艏向角为30度,此时需要调节矢量推进器夹角,从而调节特种运载器艏向角,从而满足发射对艏向角度的要求;为了验证在AFSMC控制下的艏向控制效果,这里在相同的控制参数与同一个环境中采用单纯的滑模控制作为对比实验;其仿真结果图10所示。
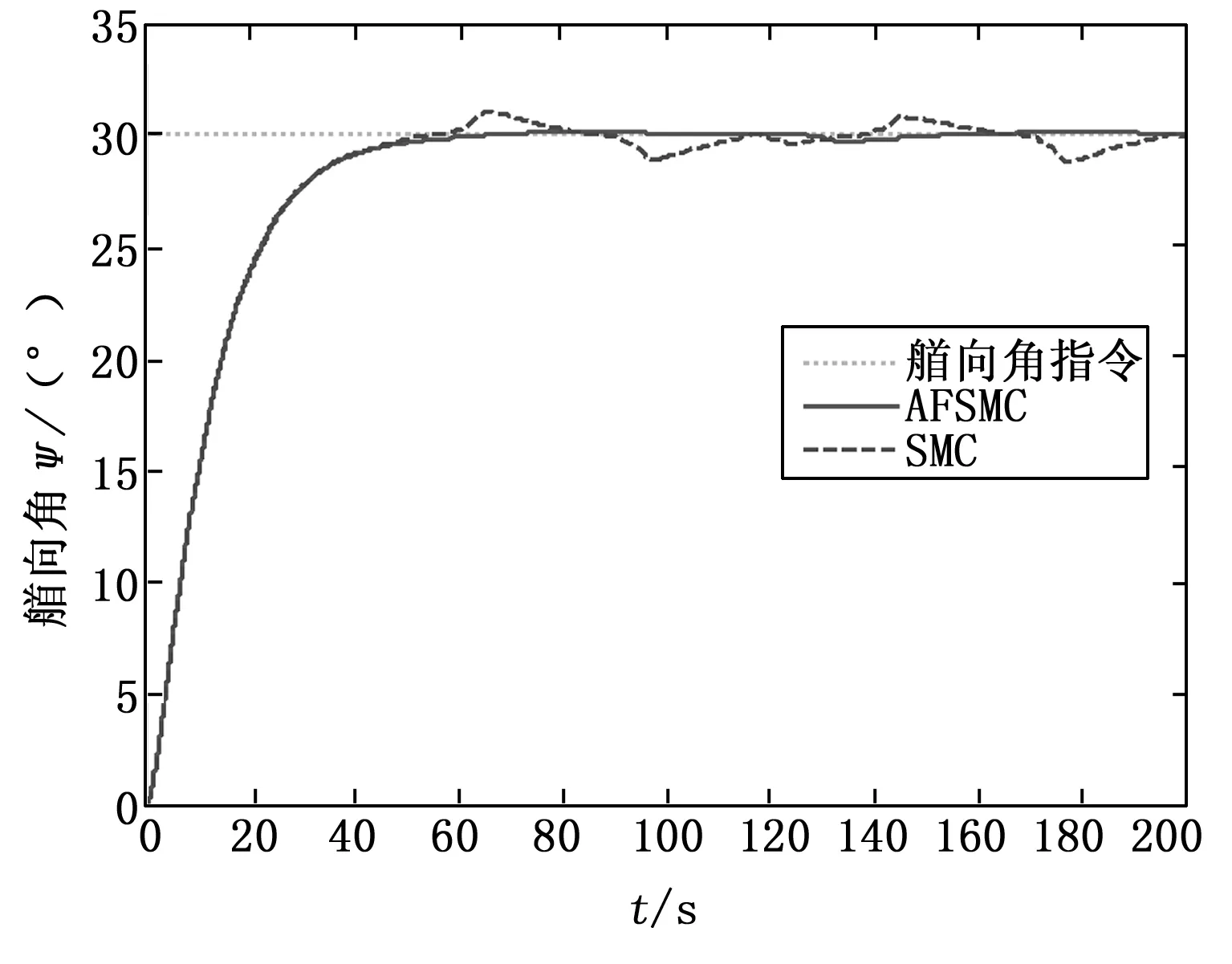
图10 特种运载器艏向角的变化
由图10与11所示,为特种运载器航向由0度变化到30度过程中艏向与矢量推进器夹角δγ的变化曲线,其中红色曲线线AFSMC为在自适应模糊滑模控制器下输出曲线,曲线SMC为在单纯的滑模控制器下输出曲线。通过对两种不同控制器下控制效果的对比,AFSMC控制器相对于SMC控制器在相应时间上相差较小,但是AFSMC相对于SMC具有更小的静态误差,控制过程也相对更加平稳,矢量推进器夹角δγ的变化曲线也较为平稳,而SMC控制器具有较大的抖振现象。
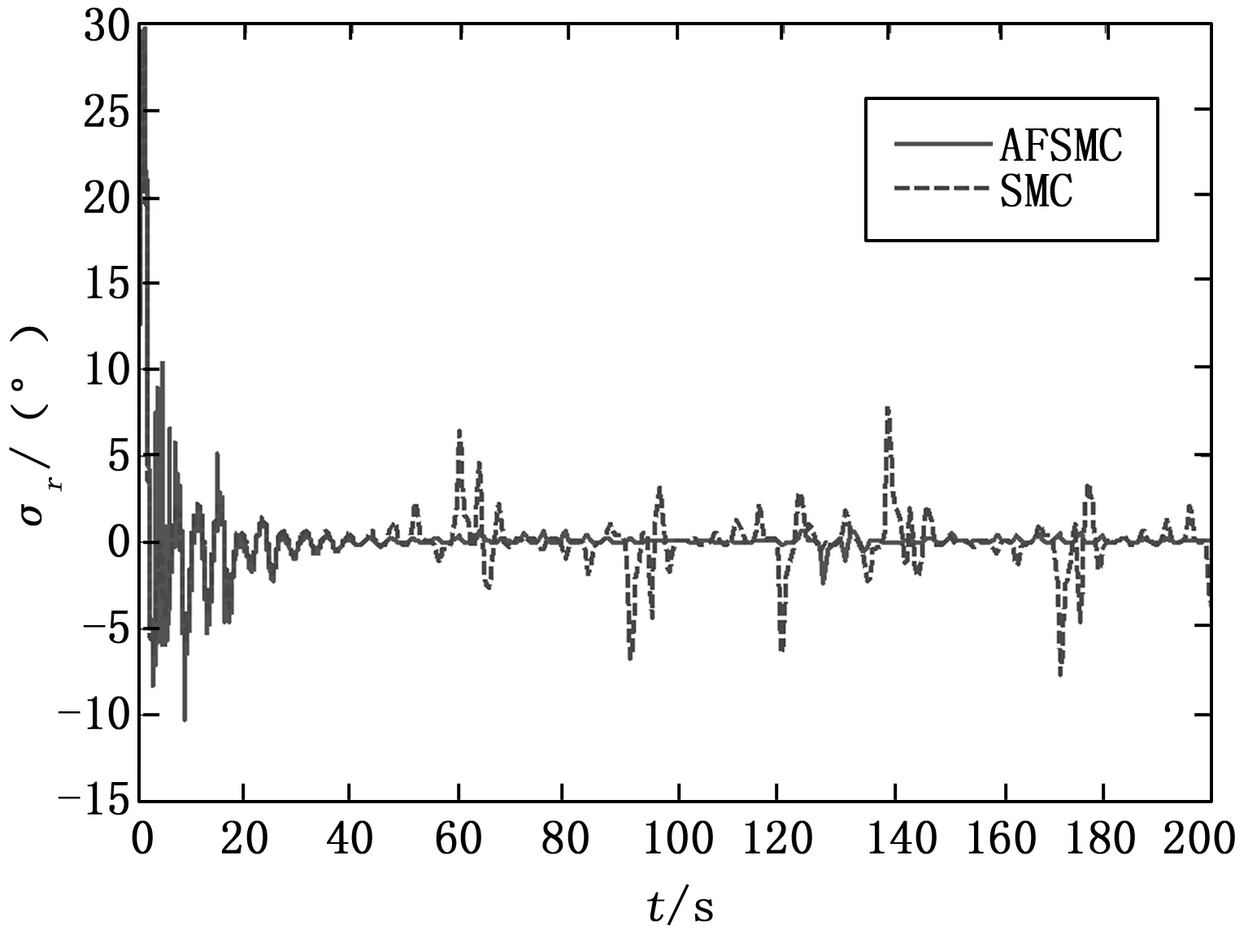
图11 特种运载器矢量推进器夹角的变化
6 结论
本文主要对深潜救生艇的紧急信息传递装置整体结构进行设计,并进一步优化器外形的线型,并利用Fluent软件对阻力进行计算,提出最优的壳体线性。然后对运载器的稳性进行分析,对特种运载器的浮心、重心进行计算,使特种运载器浮心与重心在一条垂直海面的直线上,保证了发射姿态要求,同时提供足够的浮力使发射筒露出水面。最后对特种运载器硬件控制系统进行设计,并对特种运载器上使用的各种传感器及其设备进行选型。通过Matlab进行特种运载器航向改变仿真,通过仿真结果,证明了所设计特种运载器的航向控制有效性。为深潜救生艇的潜射无人机紧急信息传递方式提供了一种安全有效的装置。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
新技术新工艺(2022年7期)2022-09-21
当代水产(2022年3期)2022-04-26
航天制造技术(2021年5期)2021-11-06
小学科学(学生版)(2021年2期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
军民两用技术与产品(2021年10期)2021-03-16
上海航天(2020年3期)2020-07-01
军民两用技术与产品(2020年4期)2020-05-16
宇航总体技术(2019年4期)2019-08-06
