
欠驱动多轴机械节能控制系统误差时域分析
2018-11-28 09:07,,
计算机测量与控制 2018年11期
, ,
(上海米度测控科技有限公司,上海 201203)
0 引言
欠驱动多轴机械系统是一种驱动装置数量少于自由装置的机械系统,使用少量驱动就可完成自由动作,并达到预设目的。由于科学技术不断进步,人们对于机械性能要求也越来越高,低耗、高速、智能化成为了机械节能控制系统必不可少优势。机械控制系统由于减少了驱动装置,可使多轴机械刚度增强,具有质量轻、功耗低特点,可满足节能控制需求。因此,欠驱动多轴机械节能控制系统得到了广泛应用,可以用作水下机器人、空间机器人、移动机器人等多种高端机械产品的主要控制系统[1]。如果系统出现故障,多轴次主动关节数量小于自由度,那么系统多轴次要关节数量将大于主动关节数量,此时该系统具有冗余性和灵活性,但却增加了系统自身重量,同时也消耗了大量能源,此时利用欠驱动多轴机械节能控制方式可有效解决这一问题。由于对系统进行控制时会存在误差,采用传统方式进行分析时,没有考虑到地域和空间环境对结果造成的影响,导致分析精准度低,为此,提出了时域分析法对欠驱动多轴机械节能系统控制误差展开研究。
1 节能控制系统误差时域分析
欠驱动多轴机械系统具有能量低、造价少、质量轻、灵活性强的优势,能够广泛应用于驱动机械系统之中。该系统具有独立控制性能,其控制变量数量小于系统自由度数量,是一种线性控制系统[2]。由于欠驱动部分约束方程式不可积的,具有二阶完整约束性能,可通过减少控制元件数量来降低系统整体质量。为了分析欠驱动多轴机械节能系统控制误差,需从系统控制时域响应角度出发,研究控制系统在动态响应和静态响应两方面的性能指标,以此为基础对系统控制误差展开分析。
1.1 控制系统时域响应
在任何一个稳定欠驱动多轴机械节能控制系统中,输入信号时间响应都是由静态响应和动态响应组成的,其中静态响应真实反映了系统在静态状态下的控制精准度,而动态响应又分为瞬态动态和暂态动态,该部分描述了控制系统的整体动态性能[3]。无论是静态还是动态响应,系统具有线性控制性能,为此,针对控制系统误差分析,需从时域静态响应和动态响应两方面出发。
1)静态响应:
系统在稳定运行状态下,从任何初始条件开始响应,经过一段时间之后整个系统就完成了过渡响应过程,之后便进入到了由外力作用下的稳定状态,该部分响应即为静态响应,因此,在该状态下的响应为趋近于无穷大系统输出状态[4]。系统在稳定状态下的输出量在最终会复原成输入量,为系统稳定状态下误差信息,以此为基础,对稳态性能展开研究。
2)动态响应:
动态响应是在输入信号影响下,系统从初始状态到最终状态的整体响应过程,依据系统结构参数,需将系统动态响应分成衰减、发散或振幅动荡这3种形式[5]。在实际运行环境中,控制系统动态响应是随着系统运行而逐渐降低的,该过程又被称为过渡过程。经过动态响应衰减过程中所有数据的获取,必须是在系统稳定运行状态下得到的,该响应部分除了固定数据之外,还需提供系统稳定速度、瞬时速度以及摩擦情况等动态信息,通过这些信息来描述控制系统动态性能[6]。
综上所述,欠驱动多轴机械系统节能控制误差是由静态响应和动态响应两部分组成的,而输入信号作用下的控制性能是由静态性能和动态性能两部分组成的。将控制性能作为指标,分别采用时域静态响应和动态响应对系统节能控制误差展开分析。
1.2 基于时域响应的误差分析
基于时域响应的误差分析采用性能指标作为衡量标准,利用动态状态下和稳定状态下的输出量作为期望值,将实际值与期望值进行对比,所产生的误差,即为动态误差或静态误差[7]。如果误差为常数,即为静态误差;如果误差是一种度量,即为动态误差。
1.2.1 静态误差
针对欠驱动多轴机械节能控制系统误差分析,除了满足动态响应信号之外,还需满足静态响应,对于不能在稳定状态下运行的系统可不采取该状态下的任何静态指标信息。无论是简单环境下,还是复杂环境下,系统是在稳定状态下满足静态性能需求的,那么可将该静态性能作为误差分析标准[8]。因此,为了研究方便,需设置初始条件,使系统在输入信号之前,输出量为0。
通常情况下,静态误差主要产生来源包括系统结构不同、输入信号不稳定、外界干扰以及零件变形等因素,这些因素导致系统在静态状态下出现误差。静态响应流程如图1所示。

图1 静态响应流程
静态误差具体计算内容如下所示。
设E1为系统希望输出值,E2为系统实际输出值,那么系统输出所产生的误差为:
E系=E1-E2
(1)
如果系统是在稳定状态下运行的,那么输出误差E的稳定值又被称为静态误差,具体计算如下所示:
E静=limE系=lim(E1-E2)
(2)
从公式(1)、(2)中看出,欠驱动多轴机械节能控制系统在稳定状态产生的静态误差与结构参数有关,也与外部输入信号有关。对于系统给定输入信号作用下所产生的静态误差,需进行计算。设输入函数为:
(3)
其中:e为常数;m为输入单位数值。
根据上述公式(2)可得:

(4)
①对于输入为0的节能控制系统,静态误差是一个常数。从空间环境角度分析,由于系统没有积分环节,所以输出值是恒定的,此时必然会存在一个恒定误差,否则系统将会0输出;
②对于输入为1的节能控制系统,静态误差位0。从空间角度分析,该状态下的系统是具有一个积分环节的,当系统处于稳定状态下时,仅仅在比例环节具有稳态结构。如果静态下的系统有误差,那么系统开始积分,此时的输出值不断增加,误差逐渐减小;如果静态下的系统输出值为0,那么误差也为0,系统将不会积分,始终维持为原积分,此时静态误差为0。
根据静态误差分析表明,系统是否产生静态误差取决于输入信号为0还是为1,不同信号输入结果,静态误差也将不同。
1.2.2 动态误差
节能控制系统除了满足控制信号响应需求之外,还需满足一些动态性能,对于不能稳定运行的系统没有实用价值,因此也不需要对该状态下的动态性能指标进行采集。通常情况下,采用阶段性输入方式可作为动态性能指标,也是最复杂的动态工作环境。如果系统是在阶段性函数作用下满足动态性能需求,那么该系统在其它函数作用下产生的动态性能也可作为误差分析标准。因此,为了研究方便,需采用典型输入信号形式作为单位阶段性函数,并设置初始条件,使系统在输入信号之前,设置输出量为0[9]。
描述系统在单位动态函数影响下,整个过度过程是随着时间变化而发生改变的,因此,可将该过程作为动态性能指标。线性控制系统无论是在零初始输入条件和单位动态信号输入状态都可作为动态误差研究指标,系统除了给定的动态输入信号之外,还受到地域环境干扰因素影响,导致电源电压出现波动、机械负载力变差等问题,因此,需采用时域方法对动态误差进行分析。动态响应过程如图2所示。

图2 动态响应过程
由图2可知:该响应过程分为5部分,分别是延迟时间T1、上升时间T2、峰值时间T3、调节时间T4和超调量T5。其中延迟时间指的是动态响应曲线第一次达到稳定状态所耗费的时间;上升时间指的是动态响应曲线第一次从稳定状态过渡到峰值状态所耗费的时间;峰值时间指的是动态响应曲线第一次达到峰值状态所耗费的时间;调节时间指的是动态响应曲线偏离稳定状态并自行调节所耗费的时间;超调量指的是动态响应曲线第一次越过峰值下的幅度与稳态值之比。
按照上述5个阶段的动态响应过程,对系统输出所产生的误差进行计算:
2型糖尿病患者的主要死亡原因为大血管病变,而非酒精性脂肪性肝病(non-alcoholic fatty liver disease,NAFLD)可以预测心脑血管疾病的发生[1],提示2型糖尿病合并NAFLD患者患心脑血管风险更高。在2型糖尿病患者中,有约2/3的人合并NAFLD,NAFLD患病率是一般人群的5~9倍[2-3]。然而,有关2型糖尿病患者发生NAFLD危险因素的研究较少。
E系′=ET1-ET2-ET3-ET4-ET5
(5)
如果系统是在动态状态下运行的,那么受到地域环境影响输出的误差E系′又被称为动态误差,具体计算如下所示:
E动′=limE系′lim(ET1-ET2-ET3-ET4-ET5)
(6)
从公式(6)、(7)中看出,欠驱动多轴机械节能控制系统在动态状态下所产生的动态误差,不但与驱动响应时间有关,还与作用点位置。通常利用上升时间或者峰值时间作为驱动响应速度指标;调节时间作为驱动响应速度和摩擦程度综合性指标;超调量作为系统受到摩擦程度指标。
根据动态误差分析表明,系统是否产生动态误差取决于动态响应过渡过程中的延迟时间、上升时间、峰值时间、调节时间和超调量。
2 实例分析
欠驱动多轴机械节能控制系统误差时域分析为实例研究目标,选择某公司生产的机器人作为实例研究对象,选择该机器人在命令执行期间内的节能控制信息作为实例分析样本,分别对系统控制误差时域动态响应和静态响应两方面进行验证分析。
2.1 静态误差实例分析
静态误差是期望输出值与实际输出值的差值,静态误差越小,说明系统控制精准度就越高,因此可将静态误差作为衡量系统性能好坏的标准。根据上述内容可知,系统是否产生静态误差取决于输入信号,不同信号输入结果,静态误差也将不同。依据该内容对控制误差进行分析,可有效解决传统方法存在空间环境影响,造成分析结果精准度低的问题。
为了验证上述内容的真实性,将传统方法与采用时域分析方法对欠驱动多轴机械节能系统误差分析精准度进行对比,结果如图3所示。

图3 两种方法静态误差分析精准度对比结果
从图3中的折线走向趋势可看出,两种方法最初分析结果精准度可达到90%。当输入信号强度为20 dbm 时,采用传统方法的分析结果精准度可达到55%,而采用时域分析方法的分析结果精准度可达到85%;当输入信号强度为40 dbm 时,采用传统方法的分析结果精准度可达到33%,而采用时域分析方法的分析结果精准度可达到86%;当输入信号强度为60 dbm 时,采用传统方法的分析结果精准度可达到20%,而采用时域分析方法的分析结果精准度可达到80%;当输入信号强度为80 dbm 时,采用传统方法的分析结果精准度可达到35%,而采用时域分析方法的分析结果精准度可达到60%;当输入信号强度为100 dbm 时,采用传统方法的分析结果精准度可达到75%,而采用时域分析方法的分析结果精准度可达到75%;当输入信号强度为120 dbm 时,采用传统方法的分析结果精准度可达到10%,而采用时域分析方法的分析结果精准度可达到90%。
通过图3中信号强度为40~60 dbm 期间,采用时域分析方法精准度大幅度下降,造成精准度下降的主要原因是系统过于闲置,使节能性能不能充分发挥。根据分析结果可知,传统方法受到空间环境影响,无法在静态响应过程中有效分析系统控制误差,导致分析结果精准度较低。而采用时域方法能够避免空间环境影响,保持较高的分析结果精准度。
2.2 动态误差实例分析
动态误差是以系统运行的时间变量为函数,提供系统比较稳定的控制变化规律。根据上述内容可知,系统是否产生动态误差取决于动态响应过渡过程中的延迟时间、上升时间、峰值时间、调节时间和超调量。依据该内容对控制误差进行分析,可有效解决传统方法存在地域环境影响,造成分析结果精准度低的问题。
为了验证上述内容的真实性,将传统方法与采用时域分析方法对欠驱动多轴机械节能系统动态误差曲线进行分析,结果如图4所示。
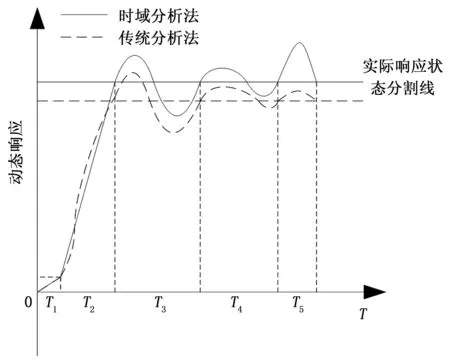
图4 两种方法动态误差曲线分析结果
图4中的T1、T2、T3、T4、T5分别代表了延迟时间、上升时间、峰值时间、调节时间和超调量。其中在延迟时间段内的传统分析方法与时域分析方法动态误差大小一致;在上升时间段内的传统分析方法与时域分析方法出现较小分歧;在峰值时间段内的传统分析方法响应状态分割线与实际分割线相比要小,此时已经偏离原始输出值,接下来的调节时间和超调量与实际值相比,误差较大。而采用时域分析方法的调节时间和超调量与实际值基本一致。
针对动态误差曲线分析情况,将两种方法的误差分析精准度进行对比,结果如图5所示。

图5 两种方法动态误差分析精准度对比结果
从图5中的折线走向趋势可看出,两种方法最初分析结果精准度可达到90%。当动态响应位于延迟时间段内时,传统方法与时域方法的分析结果精准度一致,都为85%;当动态响应位于上升时间段内时,传统方法动态响应受到地域环境影响,导致分析结果精准度降低,达到65%。而采用时域方法的分析结果,虽然不会受到地域环境影响,但是由于系统是在动态环境下控制的,分析结果精准度也会降低,可达到80%;当动态响应位于峰值时间段内时,传统方法分析结果精准度达到55%,而采用时域方法的分析结果精准度达到70%;当动态响应位于调节时间段内时,传统方法调节效果较差,导致分析结果精准度降到41%。而采用时域方法的分析结果精准度上升到75%;当动态响应位于超调量过程中时,传统方法分析精准度已经达到了最低,为20%。而采用时域方法的分析结果精准度持续上升,达到了80%。根据分析结果可知,传统方法受到地域环境影响,无法在动态响应过程中有效分析系统控制误差,导致分析结果精准度较低。而采用时域方法能够避免地域环境影响,保持较高的分析结果精准度。
2.3 结论
采用时域方法对欠驱动多轴机械节能系统控制误差进行分析,使动态响应过渡过程中的延迟时间、上升时间、峰值时间、调节时间和超调量对动态误差影响得到了有效验证,也使输入信号对静态误差影响也得到了有效验证。为此,采用时域分析方法能够改善传统系统受到地域或空间环境的影响,大大提高分析结果精准度。
3 结束语
采用时域分析方法对欠驱动多轴机械节能系统控制误差进行分析,可深入研究动态响应和静态响应下的动态误差和静态误差,不仅从理论层面上分析系统控制误差,也可从案例分析中获取控制误差分析结果精准度,由此可说明时域分析方法的真实性。
使用时域分析方法具有以下创新点:
1)从地域角度分析系统误差,通过动态响应特点绘制动态响应过程曲线,详细研究延迟时间、上升时间、峰值时间、调节时间和超调量对动态误差影响。
2)从空间角度分析系统误差,通过静态响应特点构建静态响应流程图,详细研究输入信号对静态误差影响。
欠驱动多轴机械节能系统控制误差的分析融合了机械、信号传输、控制等多个学科的知识,能够为高科技发展提供有力支持。
猜你喜欢
电声技术(2022年7期)2022-09-23
哈尔滨工程大学学报(2021年10期)2021-11-05
北京航空航天大学学报(2021年9期)2021-11-02
建材发展导向(2021年6期)2021-06-09
当代陕西(2020年24期)2020-02-01
军事运筹与系统工程(2019年4期)2019-09-11
中国航海(2019年2期)2019-07-24
宇航计测技术(2019年1期)2019-03-25
安徽农学通报(2016年20期)2016-12-26
互联网天地(2016年2期)2016-05-04
