
SmithPID算法在恒压供水中的应用
2018-11-26 09:32李明珠占永宁张守兴
电脑知识与技术 2018年22期
关键词:PID控制
李明珠 占永宁 张守兴
摘要:针对恒压供水控制系统非线性、大滞后等问题,提出了一种基于Smith预估器的PID控制算法。采用Smith预估器消除纯滞后特性带来的影响,提高系统的稳定性,加快调节过程。通过Simulink建模仿真,基于Smith PID算法的控制效果明显好于传统的PID控制,具有调节时间短,超调量小的特点。
关键词:恒压供水;Smith控制;PID控制
中图分类号:TP31 文献标识码:A 文章编号:1009-3044(2018)22-0290-01
城市供水系统管网分布范围广、铺设复杂、弯管多、具有大滯后、非线性及参数时变等特点[1],采用传统的PID控制很难达到满意的效果。在过程控制中,对象的纯滞后特性常引起系统产生超调或者振荡,Smith于50年代末针对连续系统提出了一种纯滞后的补偿算法,后来得到了广泛的研究和应用[2]。
1 Smith PID控制原理
为了解决恒压供水中纯滞后问题,提出了结合Smith预估补偿和常规PID的控制系统,其系统结构如图1所示。
其基本思想是在反馈控制中加入Smith预估器,把被延迟的被控量提前回馈到控制器,让控制器提前动作,其作用可以减小超调量,加快控制过程。
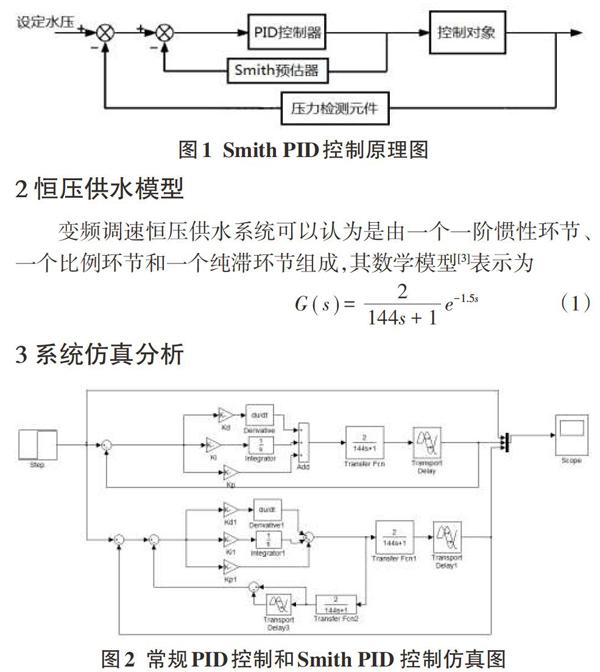
2 恒压供水模型
3 系统仿真分析
在 simulink [4]中建立仿真图,如图2所示。分别采用常规PID控制、Smith PID控制对被控对象进行阶跃输出。在常规PID控制中,通过Ziegler-Nichols法整定PID参数得,Kp=57.6,Ki=19.2, Kd=43。
图3为阶跃响应效果图,从中可看出,Smith PID控制比常规PID算法具有更好的动态和静态控制性能,这表明Smith PID是一种行之有效的控制算法。
4 结语
针对纯滞后系统,Smith PID控制算法十分有效,且Smith PID算法简单方便、便于实现。但Smith算法依赖于精确模型,当控制对象参数发生变化时,Smith算法控制效果不太理想,可以引人模糊PID控制,克服Smith预估补偿环节鲁棒性差的弱点,实现参数的自适应调整。
参考文献:
[1]尹超,李茂军,张静. 变频恒压供水系统的Smith预估复合控制[J]. 电机与控制应用, 2013,40(4)58-61.
[2]王耀南,刘治. 智能PID控制器在工业对象中的应用[J]. 自动化仪表,2001.22(5):23-25.
[3] 田思庆,程佳生. 自适应模糊控制在恒压供水系统中的应用研究[J]. 自动化技术与应用,2008,27(2):40-42.
[4]刘金琨. 先进PID控制MATLAB仿真[M]. 北京:电子工业出版社,2016.
【通联编辑:梁书】
猜你喜欢
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
现代电子技术(2015年22期)2015-12-02
现代电子技术(2015年15期)2015-08-14
