
基于四旋翼飞行仿真器的控制系统研究
2018-11-26 01:59
制造业自动化 2018年11期
(江西理工大学 机电工程学院,赣州 341000)
0 引言
随着现代科学技术的不断发展和进步,控制理论和控制算法被广泛的应用在军事、航空航天和民用等众多研究领域,且控制系统变得越来越复杂。强耦合、多变量、时变参数和高精度等性质的控制问题已经不再适合使用经典控制方法来实现,它的局限性在于只适合单输入输出的线性定常系统,很难实现对多输入输出线性定常系统的控制,更不适合于时变的非线性系统。四旋翼飞行器[1]是一个典型的强耦合和多变量的非线性系统,其控制系统是无人机[2,3]研究领域的重点,吸引了国内外大量的研究人员对四旋翼飞行器的建模和控制算法研究。常用的控制算法有PID[4,5]控制、线性二次型调节(LQR)控制[6,7]、反步法控制[8]、滑膜变结构控制[9]、模糊控制[10]和神经网络控制[11]等。PID控制因为不需要精确的模型和控制规律,易于实现等原因被广泛的运用,但是其存在抗干扰差、鲁棒性弱等问题。LQR控制具有稳态误差小和较好的鲁棒性,但是其有一定的延迟性。而反步法控制和神经网络控制需要使用具有较高性能的微控制器进行对其进行大量的计算。
本文在上述研究的控制算法的基础上,将PID控制和LQR控制相结合,设计了一种双回路的四旋翼飞行姿态控制系统,实现了对四旋翼飞行仿真器的姿态控制,并通过实时控制实验分析验证了控制系统的有效性。
1 建立数学模型
四旋翼飞行仿真器是一个适用于自动控制理论研究和航空航天系统研究的实验系统仿真平台,其可以模拟飞行器在空中的飞行姿态,是一个具有多变量、强耦合、非线性等特性的系统研究平台。其安装在万向节轴上的四个带螺旋桨的电机为四旋翼飞行仿真器提供了上升或下降的动力,来实现仿真器平台的姿态运动。前向、左侧、右侧三个电机驱动其对应的螺旋桨来实现仿真器平台的俯仰(pitch绕y轴旋转)运动;左侧、右侧两个电机驱动其对应的螺旋桨来实现仿真器平台的横滚(roll绕x轴旋转)运动;后向电机驱动其对应的螺旋桨来实现仿真器平台的偏航(yaw绕z轴旋转)运动。由安装在仿真器平台上的三个编码器来检测姿态角形成反馈构成闭环系统,以此来实现对四旋翼飞行仿真器的俯仰角、横滚角和偏航角三种姿态角的精准定位。
1.1 动力学分析

图1 四旋翼飞行仿真器实物图及原理
依据四旋翼飞行仿真器建立其三维坐标系,建立的坐标系如图1所示。其中,坐标的原点为支撑点,X轴为对应的指向前向电机的轴,Y轴为对应的指向右侧电机的轴,Z轴的正方向则利用左手定则确立。并定义前向、左侧、右侧电机产生的驱动力与Z轴同向为正,后向电机产生的驱动力与Y轴同向为正。Ff、Fl、Fr、Fb前向、左侧、右侧、后向电机的驱动力。
为了便于数学建模和运动分析,根据四旋翼飞行仿真器的系统特点,简化过程将其近似为一个线性系统并做下述假设:
1)假设仿真器是刚体,且重心位置和几何中心重合;
2)假设仿真器处于静平衡状态时,重心的位置在偏航轴上且三个姿态角为零,并忽略摩擦力和旋翼阻尼力矩;
3)假设旋翼旋转所产生的升力为一个线性系统,正反转产生同样的力,并忽略旋翼达到指定转速的时间;
下面根据四旋翼飞行仿真器,建立其笛卡尔坐标下俯仰角、横滚角和偏航角的三个姿态角的力矩平衡模型:
(1)俯仰角力矩平衡方程:
对飞行仿真器的俯仰角做静平衡受力分析如图2所示。

图2 俯仰角受力分析图
飞行仿真器进行俯仰运动时,左右侧电机力力为正,前向电机力为负,选取前向电机向下的运动夹角为俯仰角的正方向,并建立方程:

其中:Lc=Lfcosθ;F=KfcV,则得到:

(2)横滚角力矩平衡方程:
对飞行仿真器的横滚角做静平衡受力分析如图3所示。
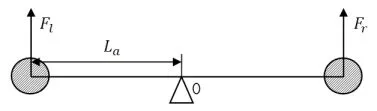
图3 横滚角受力分析图
飞行仿真器进行横滚运动时,左侧电机力力为正,右侧电机力为负,选取右侧电机向下运动夹角为横滚角的正方向,并建立方程:

其中:La=Lfsinθ,则得到:

(3)偏航角力矩平衡方程:
飞行仿真器进行偏航运动时,动作比较简单,只有后向电机控制其绕Z轴转动来影响偏航角。因此以其初始状态为平衡状态,绕Z轴逆时针转动的方向则为横滚角的正方向,并建立方程:

化简为:

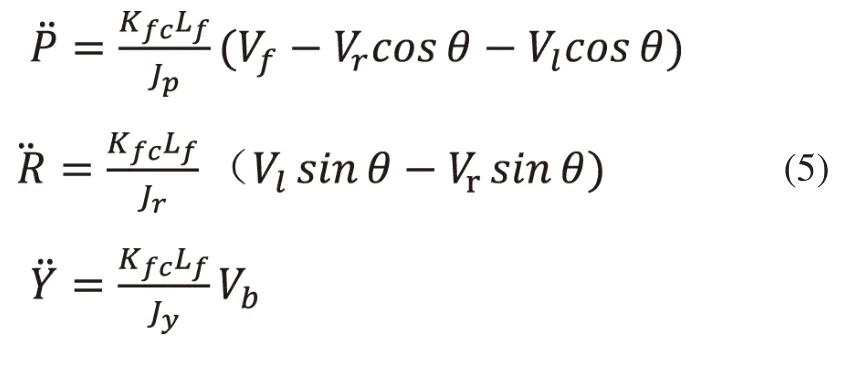
为保证飞行仿真器悬停时系统静平衡,在前向臂上增加配重,并设各部分质量近似为一质点,得到三个姿态角的转动惯量为:

综合上述式(1)、式(2)、式(3),则三个姿态角力矩平衡方程为:
1.2 建立状态方程
根据式(5)姿态角力矩平衡方程,从中可以看出四旋翼飞行仿真器有三个姿态角输出和四个电机电压控制输入,其中俯仰角和横滚角具有相互耦合的关系。对其进行解耦处理,定义三个输入向量u=[u1,u2,u3]T,且按照如下关系式进行控制量分配:

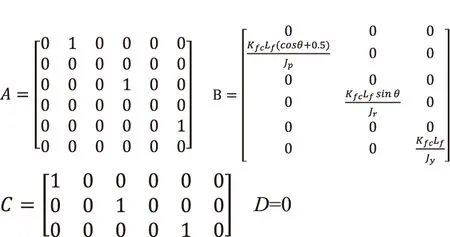
为了简化控制模型,达到跟踪期望值的目的,选定六个系统状态变量,状态变量系统输入为输入量u=[u1,u2,u3]T,系统的输出量为三个姿态角,则输出y=[p,r,y]T。建立四旋翼飞行仿真器模型的六状态空间表达式:

其中系数矩阵为:
根据四旋翼飞行仿真器的具体材料特性和实际测量结果,飞行仿真器的相关物理参数如表1所示。
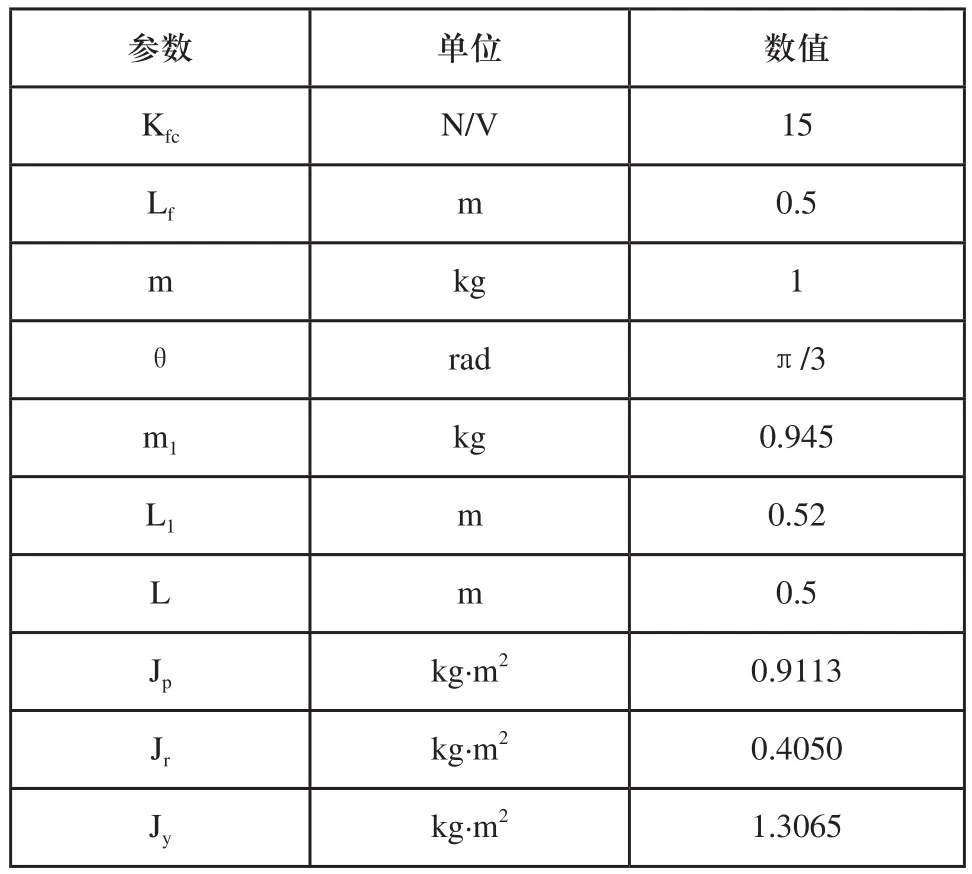
表1 四旋翼飞行仿真器参数
2 系统控制器设计
本文设计了一种由PID控制姿态角外回路和LQR(线性二次型)控制姿态角速率内回路,两个控制器共同组成双回路的姿态控制器,来实现对四旋翼飞行仿真器的姿态稳定控制。
2.1 内回路控制设计
LQR即线性二次型,是一种线性的最优控制。系统的状态方程是线性的,则选取由状态变量和控制变量组成的二次型积分函数作为指标函数。通过确定最佳的控制输入,使得性能指标函数达到极小值来实现对控制系统的最优化控制器设计。
本文运用LQR控制方法分别设计三个姿态角速率内回路控制器,将状态变量的误差作为一个新的状态变量加入到系统中,通过对控制器的设计使误差变为零,使控制系统达到准确跟踪参考输入量。根据四旋翼飞行仿真器的状态空间表达式(6),设系统的参考输入量为i,系统的待跟踪输出为q,且q=Ccx,则误差e=i-q。将误差e作为一个状态变量添加到系统中,则扩展得到的新系统状态空间模型为:


控制性能泛函J最小,则构造一个Hamilton函数。

当输入量不受约束时,则对Hamilton函数求导并令其函数的值为0:

求得最小值,因此得到最优控制信号:

λ可由下式求出:

P可由Riccati方程求出:


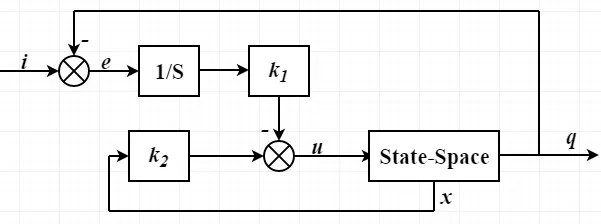
图4 姿态角速率内回路LQR控制框图
进行LQR控制器设计时,系统的整体控制性能受加权矩阵Q各主对角系数的影响很大。当偏重于输出时,增大Q的参数;当需减小控制输出时,则增大R的参数。在调试过程中,为实现对系统的最优控制,在输出和控制输出之间找到一个最佳平衡点后,运用Matlab软件提供的函数lqr(),并输入状态方程的系数矩阵A和控制矩阵B,以及加权矩阵Q和R,求出最优反馈增益矩阵K阵。
2.2 外回路控制设计
在控制算法研究领域中,PID控制是一种基础的控制算法,因其具有易于操作,原理结构简单,适应性强,响应速度快,对模型要求不精确等特点,一直被广泛地使用。为了系统的实际控制要求,使用一些经验法则:把PID控制当作是PI控制和PD控制的组合,PI控制能够抑制系统的高频噪声,并改善系统的稳态误差;PD控制可以改善过高的超调量,同时适当的增加响应速度。
本文在运用LQR控制飞行仿真器的三个姿态角速率内回路的基础上,使用PID控制中的PI控制其三个姿态角的外回路,两个控制器组成双回路姿态控制系统。PI控制能够包裹住系统中的未知干扰,从而进行高精度的姿态角控制。则四旋翼飞行仿真器三个姿态角整体的控制回路框图如图5所示。

图5 姿态角整体回路控制框图
姿态角的控制表达式为:

经过Lapalce变化得传递函数为:

在进行实时控制实验时,根据其二阶系统最优阻尼比原则,可以确定姿态角外回路PI控制的Kp(比例系数)和Ki(积分系数)。
3 实时控制分析
四旋翼飞行仿真器实时控制使用的软件为Matlab/Simlink,采用软件中的实时工具箱RTW(Real-Time Workshop)来实现对其控制任务,其中的Real time control模块就是系统实时控制子模块,其中包含了控制信号输出模块和编码器采样模块。根据式(6)四旋翼飞行仿真器的状态空间模型,从中提取有关参数,取增益矩阵Kp=[1.56,2.60],Kr=[0.77,1.27],Ky=[0.58,1.05],取PI控制器参数为Kp1=3.500,Ki1=0.200;Kp2=3.200,Ki2=0.150;Kp3=3.400,Ki3=0.258;在Matlab/Simlink中搭建飞行仿真器的姿态角实时控制模型如图6所示。

图6 姿态实时控制模型
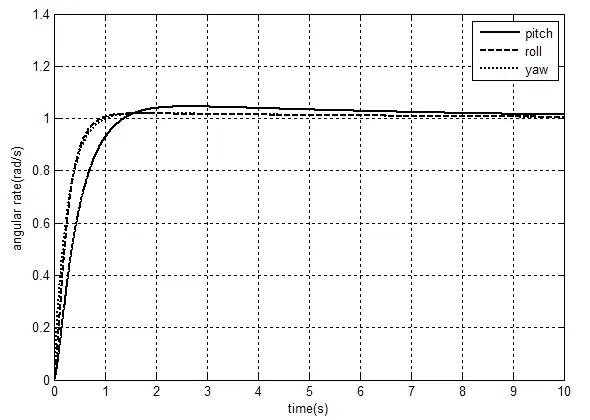
图7 姿态角速率阶跃响应
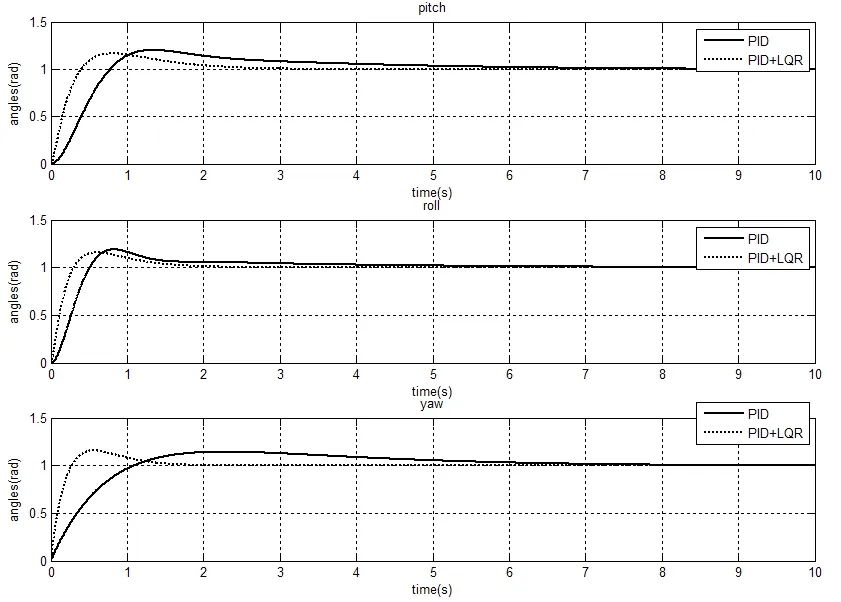
图8 两种控制阶跃响应
当对四旋翼飞行仿真器采用姿态角外回路PID控制和姿态角速率内回路LQR双回路控制系统时,三个姿态角的角速率回路阶跃响应曲线如图7所示,姿态角速率的内回路控制超调量很小,而且能够很快跟上输入量,达到控制效果。根据LQR控制率,对于姿态角内回路的干扰,系统增加误差为状态变量,使得姿态角速率响应会快速达到目标位置。图8为分别对四旋翼飞行仿真器采用LQR控制和PID与LQR结合的双回路控制时,系统平台的阶跃响应曲线。由此曲线可以看出,PID与LQR结合的双回路控制系统响应速度快,且相对具有很明显的提高。三个姿态角的稳定时间短,调节时间均为2S左右,且系统稳态精度高,具有较好的鲁棒性且超调量相对较小,控制性能优于LQR控制。
4 结束语
本文基于四旋翼飞行仿真器,设计了PID控制姿态角外回路和LQR控制姿态角速率内回路的双回路控制器系统。姿态角速率内回路LQR控制充分利用了其稳态误差小和鲁棒性较好的优点;姿态角外回路PID控制引入PI控制,充分发挥了其不需要精确模型的特性;通过实时控制分析,本文设计的控制系统解决了单一控制回路的抗干扰差、鲁棒性弱和具有延迟性的问题,具有品质良好的控制性能。
猜你喜欢
中国计算机报(2020年9期)2020-03-25
铁路计算机应用(2018年4期)2018-05-03
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
中国新技术新产品(2017年1期)2017-01-20
科学与财富(2016年28期)2016-10-14
现代电子技术(2015年5期)2015-03-31
舰船科学技术(2015年8期)2015-02-27
汽车文摘(2014年9期)2014-12-13
中国航海(2014年1期)2014-05-09
