倾斜摄影技术在乡村景观规划设计中的应用
2018-11-20 07:11李敏勇
福建商学院学报 2018年5期
李敏勇
(厦门兴才职业技术学院 艺术与建筑学院,福建 厦门,361024)
随着城市化的不断推进,全国各地逐步掀起了乡村振兴的建设浪潮,但在很多地方乡村景观规划在很大程度上受到城市景观规划的影响,未能考虑到乡村的实际情况。现在乡村景观的规划设计逐渐引起了相关部门的重视,但用于设计乡村景观规划方案的传统手工三维模型所需采集的数据量大,耗费时间长,对外业数据采集人员要求高,所以丢失、遗漏数据等情况经常发生,导致乡村景观中的建筑细部构造只能通过建模人员推测而得,人工干预的程度较高,结果较为主观,与实际的场景偏差较大,而且精度方面并不能满足项目落地阶段的需求[1]。如何以高效的方式获取真实准确的实景三维模型,并将规划方案与模型完美地进行无缝融合,然后在此基础上优化调整,是乡村景观规划设计中必须考虑的问题。利用无人机倾斜摄影技术快速生成精度高的实景三维模型为乡村景观规划设计提供了一种新思路。
目前,倾斜摄影技术在国内还处于起步阶段,其在乡村景观规划中的应用较为少见,现阶段大部分是运用于城市与建筑规划这些领域。薄正权等[2]利用倾斜摄影技术构建长春城区数字化实景模型,为智慧城市的发展做出了一定贡献;赵雷等[3]通过倾斜摄影技术采集了城市建筑物空间的相关数据,为城市管理审核与违法建筑的拆除提供有力的依据;王保国等[4]将拟规划的三维方案导入无人机倾斜摄影,测量生成实景三维模型,对规划方案进行比选,提前发现规划方案中存在的不足之处;柳婷等[5]针对城市轨道交通规划选线,将倾斜摄影测量应用于BIM+GIS技术,对周边轨道交通线路的信息资源进行有效整合。虽然倾斜摄影技术在城市与建筑规划中的应用正逐步走向成熟,将倾斜摄影技术应用于乡村景观规划设计相关的研究却很少。研究倾斜摄影技术在乡村景观规划设计中的应用有极大的现实意义,因为倾斜摄影技术可以在较短的时间内获取目标的空间位置与全景三维坐标,并借助软件快速、精确、高效地建立三维实景模型,为乡村景观规划设计带来巨大的突破。应用倾斜摄影技术辅助乡村景观规划设计,建立规划区的实景三维环境,将方案的三维模型与乡村景观实景模型进行结合,对乡村景观规划方案进行多角度、全方位的展现,这有利于提升乡村景观规划方案的科学性,为专家审定方案提供可靠的依据,从而更好地推动全国乡村的建设[6]。
一、倾斜摄影技术对于乡村景观规划的重要性
倾斜摄影测量技术是近年来在国内外测绘领域兴起的一项高新技术,其利用多旋翼无人机到实地航拍影像,再经过软件自动化建模生成实景三维模型,可以完整、无差别地还原真实的乡村景观,从而避免了人工建模时有选择的还原所带来的信息损失。运用倾斜摄影测量技术生成的实景三维模型支持三维浏览、量测,含有完整的地理特征和空间信息,是乡村景观的直观表达,可以满足规划方案多角度、全方面分析的要求。倾斜摄影技术对于乡村景观规划设计的意义主要体现在以下几方面:
(一)可反映乡村景观的真实情况
传统乡村景观规划通常基于CAD平面图与拍摄的照片,估算建筑物的形状、高度等信息,利用3ds Max及PS等制图软件进行人工建模与渲染,但利用这种方法生成的三维模型精度较低,表现效果与实际场景差别较大。运用倾斜摄影技术,规划设计范围内的地形、地貌与建筑都可以借助倾斜摄影技术采集的数据生成如图1所示的三维实景数字模型,而且可以将规划方案融入这个实景模型中,形成一个虚拟现实的场景。通过这个场景,可以准确地判断人的视线范围或景观通廊内的建筑高度是否超标,同时也能全方位、多角度地观察规划区域内的建设是否会对周边的景观节点造成影响,直观地感受规划设计方案实施落地后的景观效果。借助规划方案与实景模型结合的动态交互体验可以对规划方案的合理性进行全面的审视与判定,将方案中不合理的部分进行调整优化从而获得切合实际的规划设计方案。规划方案通过与真实的三维乡村景观模型结合的方式,可以帮助规划设计人员更加科学、有效地进行工作[7]。

图1 乡村景观三维实景模型 Fig.1 3D scene model of rural landscape
(二)具有完整的地理与空间信息
目前大部分乡村景观规划设计利用CAD、3ds Max及PS等制图软件生成效果图来表现区域的三维空间。然而,CAD 是一个独立的平面设计系统,3D 是一个独立的建模系统,而PS的处理则只是僵硬固定的合成效果,并且这些三维模型都不具有地理信息,没法准确对应现场的情况,这对于后期方案的评审与实施都有一定影响。倾斜摄影技术在数据采集时搭载高精度的IMU/GPS系统,在获取多角度倾斜影像的同时,记录高精度POS数据,经过软件自动化解算后能在输出的三维成果中附带完整、准确的地理信息和体量信息。规划设计人员通过倾斜摄影技术对空间数据的采集和分析,不仅可以对乡村景观环境进行系统化、定量化的信息表达,还能将规划设计区域内的三维空间效果表现出来,同时还可以提供表现图、虚拟模型等手段所难以提供的实景空间体验,通过这种方式可以更加有效地组织景观空间与丰富视觉效果,从而弥补传统乡村景观规划手法的缺陷[8]。
(三)三维建模效率较高
传统手工三维模型虽然具备一定的三维可视化效果,但因为乡村景观的数据采集的工作量大,时间长,对外业数据采集人员要求较高,导致传统手工模型生产难度大,经常出现丢失、遗漏数据等问题,这些都对建模的效率造成一定的影响。基于倾斜摄影技术的三维建模的效率比传统的手工建模有了明显的提升,因为倾斜摄影采集一个架次的倾斜数据往往只需25分钟,便可获取约1 500张倾斜影像,然后利用Context Capture分布式图形处理软件进行处理,其独特之处在于可支持多台运算引擎进行集群处理,原理是将待重建模型拆分为多个瓦块后派发至接入同一内网的运算引擎当中,利用多台计算机的性能进行同一个模型的重建。随后利用Street Factory进行三维场景自动生成,可全自动进行正摄影像与倾斜影像的联合空中三角测量,构建三维模型,进行快速的精细纹理贴图。通过该方法可使建模效率倍增,速度可以高达4 h/km2,大大节约了乡村景观规划设计中三维建模的时间。
(四)生成精度高、可浏览的三维模型
传统的乡村景观规划通常用鸟瞰效果图来表现它的整体平面效果,但这只能从较为局限的角度感受方案的鸟瞰效果,与之相对应的三维模型因为受限于计算机的性能很难实现空间的漫游,只能用相对静态的方式感受方案的三维效果。另外,由于建模的数据量较大,所以丢失、遗漏数据的问题经常出现,导致最终生成的模型人工干预的程度较高,大大影响了乡村景观实景模型的精度,使方案的最终成果受到了一定程度的影响。利用倾斜摄影技术构建的模型可通过LocaSpace Viewer来进行三维实景空间的漫游,空间布局的合理性可以借助动态观察的形式来判定,多角度、全方面地审视景观规划效果,重点对视线通廊、布局的合理性、景观节点的空间体验感受进行评判。动态漫游一方面突破了空间定点观测的局限性,另一方面能够以连续的视线转移来真实地感受规划方案的三维环境。同时,斜摄影数据也可以在Acute3D软件中进行快速查看,并针对乡村景观中的各种要素进行量测。图2为用多种方式测量的照片,测量主要以乡村景观中的建筑的尺寸为参照依据。针对Acute3D中量测建筑模型的数据成果,抽样选取5栋建筑的数据与通过传统卷尺测量、手持激光测距仪、三维激光扫描仪等多种量测方法所得的数据进行对比验证,其精度误差均小于10cm,可以满足村规划建设的精度要求,对比结果如表1所示。

图2 多种方式量测以验证精度Fig.2 Measurement in various ways to verify the accuracy

建筑墙面编号Acute3D中量测墙宽(mm)卷尺测量墙宽(mm)手持激光测距墙宽(mm)三维激光扫描墙宽(mm)L0317 0307 0167 0037 040R1024 4504 4304 4414 420L08911 25011 16511 19211 180R0406226 1856 1916 170L0213 9203 9053 8663 900
二、倾斜摄影原理与技术路线
倾斜摄影技术采集影像的方式是通过同个飞行平台上的多台传感器从一个垂直、四个倾斜的角度拍摄来实现,改变了以前正射影像只能从垂直角度采集影像的缺陷,它由倾斜摄影数据获取技术和数据处理技术组成。倾斜摄影搭载的相机与GPS接收机、IMU高度集成。因此,倾斜摄影不仅可以用相机来提供影像信息,还可以通过 GPS与IMU提供位置和状态信息[9],利用这种方式获取的全面数据可以借助先进的定位、融合、建模等技术自动生成真实的三维乡村景观模型,大大提高了乡村景观三维建模的效率。
(一)倾斜摄影设备
本次研究所进行的案例均由图3所示的多旋翼双镜头倾斜摄影无人机进行倾斜影像的数据采集。该飞行器是由厦门云上晴空航空科技有限公司研发的YS-1200倾斜摄影无人机,起飞最大允许载重量为8.2kg,作业高度为50~300米,以轴距为1.2米的八旋翼作为数据采集平台,作业时挂载两个SONY A5100相机,单个相机有效像素为2 460万,挂载相机后单次飞行作业时长可达25分钟。YS-1200无人飞行器中安有一组二轴相机云台,只需搭载两台相机。在一个航点云台旋转4次,每次旋转两台相机各采集一张倾斜影像,即可在单个航点采集8个角度的照片数据,所获取的影像像素可达2 430万,同时云台设有三层滤震系统,使照片成像消除运动模糊的问题。

图3 YS-1200多旋翼双镜头倾斜摄影无人机Fig.3 YS-1200 multi-rotor double- lensoblique photography UAV
(二)技术原理
以图4中的主流的五镜头倾斜航摄设备为参考,飞机在拍摄多角度相片的同时,记录下当前的航高、坐标、航速、俯仰角等信息。处理信息的核心技术主要有:多视影像联合平差、多视影像密集匹配、数字表面模型生成和真正射影像纠正。在数据采集完成后倾斜影像的建模处理主要通过以下两个步骤进行:
1.空中三角测量步骤对已采集的倾斜影像特征点进行大量的计算和提取,针对所获取的特征点采用多视影像密集匹配的方式快速准确地获取多视影像上的同名点坐标,图片的空间位置与姿态角度可以利用反向解算得出,并对图片间存在的关系进行确认。
2.Context Capture软件通过空三加密点计算后进行模型重建的工作,调整好输出三维模型的空间框架后进行重生成,可得出不规则三角网TIN,并且生成该三维模型的白模,最后通过三维模型形状位置从倾斜影像数据里选择合适的贴图进行纹理的贴合,输出纹理真实的可视化实景三维模型。
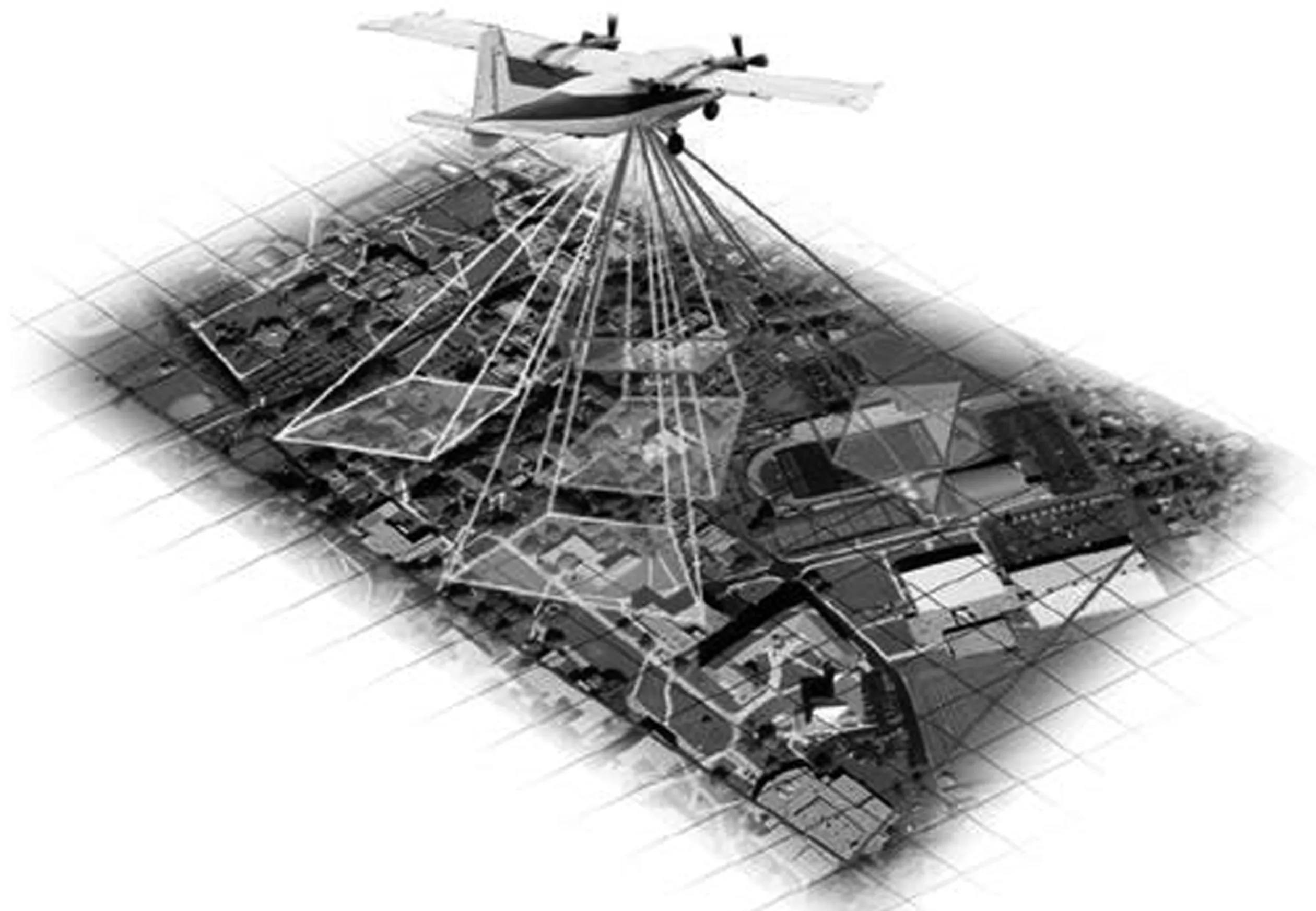
图4 五镜头倾斜航摄设备Fig.4 Five- lens oblique aerial cameras
(三)技术路线
本研究利用无人机倾斜摄影获取乡村景观环境的影像与数据,通过相关软件对数据进行处理,自动生成三维实景数字模型,将其应用于乡村景观规划设计中。具体技术路线是:利用无人机倾斜摄影获取高分辨率影像数据进行解译,得到乡村景观影像数据,通过Context Capture对数据进行预处理;利用包含POS信息的照片进行空中三角测量计算,得出各照片的三维位置,并导出空三角处理结果;然后回到General界面,单击右侧New reconstruction进行模型构建,之后输出OBJ格式的模型将该成果导入3D Max专业三维处理软件当中进行应用。通过软件生成的乡村景观三维实景模型,可将其应用于乡村景观规划设计中,研究技术路线如图5所示。

图5 技术路线Fig.5 Technical route
三、基于倾斜摄影技术的松岭村景观规划设计
(一)区域概况
松岭村位于福建漳州龙海市东泗乡南溪下游,背靠玳瑁山,距厦门市区约45公里。该村农业耕地面积为34.67公顷,山地面积为114.67公顷。对松岭村的景观规划依托东泗乡“十里花溪”景观带进行。该案例可突出体现倾斜摄影技术在乡村景观规划设计中的应用,通过倾斜摄影获取的乡村景观环境信息、建筑外观信息为松岭村的乡村景观规划设计提供了原始数据。
(二)航线设计
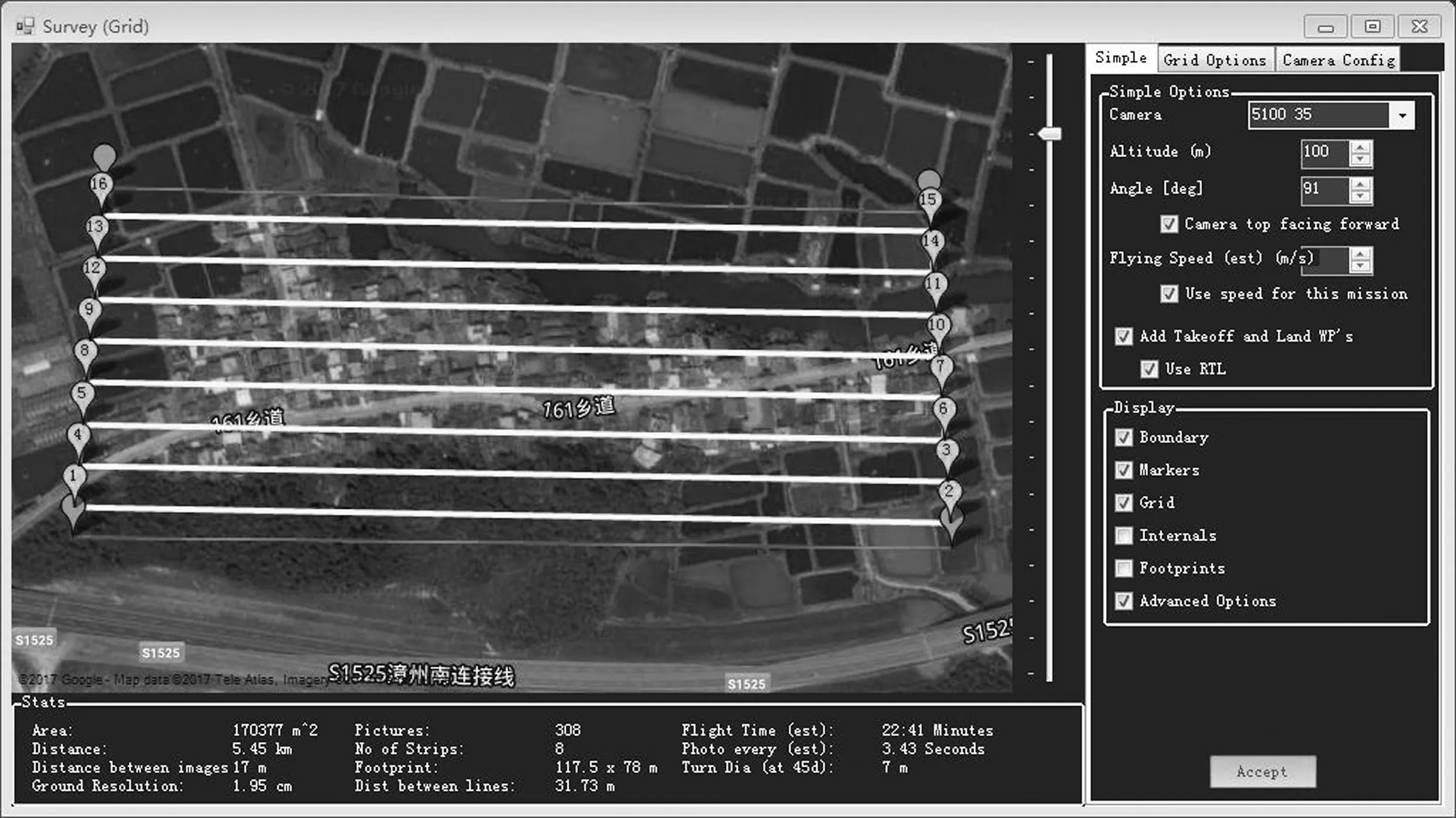
图6 无人机航线Fig.6 UAV route
为保证边缘物体能够立体成像,航线所覆盖范围要超过测区边界线200 m以上。考虑项目目标区域范围较大,可以分块对测区进行航拍测量,因为单架次飞行航时有限,可以将大范围飞行航线分段多架次飞行。航线可以布设多条,单架次只飞其中的 2 或 4 条,整个航线飞行结束可以不用考虑各架次之间的航线重叠,可以有效减少作业时间,提高工作效率,最终规划航线如图6所示。绘制航线区域后可在谷歌地图、LocaSpace等在线地图软件中查看相对位置及区域内各部分位置的高程差,分析所规划航飞区域的安全性;进行现场踏勘,寻找合适的飞机起降地点,留意航线区域内是否有高山、高楼、电塔等不安全因素,以确定飞行的高度;参照飞行区域的大小和飞行环境允许的飞行高度,根据案例的精度需求设置飞行速度、飞行高度、航向重叠度、旁向重叠度等参数;设置完成后按照航线设计数据飞行,航空摄影时,飞行要尽可能平稳,旋偏角、航偏角不能超过规范要求。
(三)数据处理

图7 空中三角测量成果三维视图Fig.7 3D view of aerial triangulation results
倾斜摄影完成后,将获取的测区影像中变形、扭曲的图像按要求进行修复,影像达到标准之后,对影像进行统一编号,然后运行Context Capture Center Engine启动引擎,打开Context Capture Center Master,新建项目并设置存储路径,在程序左侧项目栏中右键点击导入区块,选择Import blocks将预处理过程所编辑的Block Import Sample表格导入。区块导入后可在项目栏选中该区块并点击Photos查看所添加照片的信息,此时已根据Excel表格中的路径添加POS文件夹中两台相机带有POS信息的照片。确认所添加照片无误后还需单击Add photos添加两组不包含POS信息的照片,随机选择照片,在右侧信息栏中查看照片信息,主要查看经纬度、高程是否与照片关联。利用包含POS信息的照片和两组照片进行空中三角测量的计算,其目的是计算出各照片的三维位置。空中三角测量结束后会出现如图7所显示的界面,界面中会提示数据处理结果的一些信息,并可导出空三处理结果。最后单击3D view以三维形式查看空中三角测量的成果,单击顶部各航点可查看到相对位置的照片信息。
(四)生成实景三维模型
在数据处理完之后,通过自动建模软件加载测区影像,空中三角测量结束后回到General界面,单击右侧New reconstruction进行模型重建。同时,点击Spatial framework对新建模型的空间框架进行设置,可在该界面进行所输出模型坐标系统的定义,通常将坐标系统更改为WGS84坐标系统。由于单个模型数据量较大,普通计算机性能不足以满足运算,因此在重建模型时应将整个模型拆分为多个瓦块。在模型重建向导中可进行成果输出格式、成果输出质量的选择。Format格式选项中可选择较为常用的3MX、S3C、OSGB以及可在3D MAX软件中打开的OBJ格式等。在Texture compression纹理压缩选项中可以选择贴图纹理的质量,相对而言质量越高,数据处理的时间越长且数据量越大。在Context Capture中模型重建时选择输出OBJ格式的模型即可将该成果导入至3D Max专业三维处理软件中进行应用,图8为模型初步渲染的成果。
图8 模型渲染的初步成果Fig.8 Preliminary results of model rendering
(五)基于实景模型的方案效果
在乡村景观的实景三维模型生成之后,可以全方位地查看规划方案中的要素与其周围真实场景融合之后的效果。借助相关软件的应用,可以对规划设计区域内的高度、宽度、坡度等进行量测,也可以对实景三维模型中的方案进行视域分析、景观尺度分析、景观立面分析等,还可以在实景三维模型中调整方案不合理的部分,并将调整后的方案进行前后对比,分析调整前后方案的优劣之处,以便于更好地把握规划方向,使整个规划设计范围内的景观与周围风格、色调保持一致,规避规划方案中的缺陷,提高规划设计方案的合理性和可行性[10]。图9为松岭村村口景观三维实景现状,图10为规划方案结合乡村景观实景三维模型后优化调整导出的部分效果图。

图9 松岭村村口景观三维实景现状图Fig.9 3D view of the village entrance in Songling

图10 松岭村村口景观三维规划效果图Fig.10 Renderings of 3D planning of village landscape in Songling
在实施乡村振兴战略的背景下,乡村建设对规划编制和规划管理等工作提出了更高的要求。倾斜摄影技术可以给传统乡村景观规划领域带来新的变革与突破,乡村景观规划从二维图纸化转向三维可视化已成趋势。利用无人机倾斜摄影技术生成的实景三维模型在乡村景观规划方面的应用还有待拓展,这项技术的应用在国内仍处在一个不断探索的阶段。大数据量带来的多种数据成果输出,虽已有应用实例,但是在乡村景观规划方面的应用方法仍然极其有限,并且缺乏技术规范标准与数据应用标准,随着技术的发展,这些问题会迎刃而解,倾斜摄影技术在乡村景观规划领域的应用将变得更加广泛和成熟。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
美与时代·城市版(2022年3期)2022-04-25
华人时刊(2021年23期)2021-03-08
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
流行色(2020年1期)2020-04-28
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
现代园艺(2018年1期)2018-03-15
现代园艺(2017年11期)2017-06-28
北方音乐(2017年4期)2017-05-04