基于无人机的物联网监测系统
2018-11-20 06:04胡张兵张巧云
物联网技术 2018年10期
赵 亮,胡张兵,黄 晶,吴 豹,张巧云
(滁州学院 计算机与信息工程学院,安徽 滁州 239000)
0 引 言
基于无人机的物联网监测系统不同于传统的数据采集与监测系统,是将当前新兴的传感器和RFID无线射频技术融入到无人机行业而诞生的产物。基于无人机的物联网监测系统并非第一个与传统监测系统不同的概念。早在前几年,机器人、汽车行业就使用了相关传感器技术,而最近相关公司提出的无人机大气监测系统和无人机农田检测系统均为相关概念[1]。随着科技的飞速发展和相关产业的爆炸型增长,以及人们生活水平的提高,人们对环境的重视度越来越高,而这种新型的基于无人机的物联网监测系统可以弥补人工在环境监测方面时效性和准确性的不足,同时数据采集的准确度和实时性也得到了大幅提高,所以利用无人机技术监测环境成为了未来发展的必然趋势[2]。
在物联网应用中,无人机可运用于无线图像采集系统、农田信息采集系统、交通监控系统、红外监控系统等[3]。当前基于物联网的安防监控系统以图像监视为手段,对现场图像进行实时监视与录像[4],视频监控系统方便安保人员直观掌握现场情况,并通过录像回放对事件进行分析和取证。但该系统需要在广阔的区域(例如机场、农田等)部署大量的摄像头,以防出现监控死角,而采用无人机进行监测可将摄像头和各类传感器(红外传感器、门磁传感器)相结合,形成无线监控网络[5],大大节约了成本。
本方案拟采用的四旋翼无人机能够通过不同的传感器来获取数据信息[6],不仅大幅降低了硬件成本,而且更有利于传感器维护;使用机载微型摄像机不仅能够充当辅助导航设备,获取地面图像,进行分析、解算、校正,甚至还可改变其飞行路线,实现无人机自主飞行,并将拍摄的画面实时传送给管理者。
1 系统整体设计
基于无人机的物联网监测系统可以分为硬件设置和系统功能两个模块。硬件设置可分为飞行控制模块,数据采集模块,串口选择模块和波特率设置模块;系统功能模块可分为数据分析模块,数据处理模块,数据存储模块以及路径规划模块。系统功能如图1所示。
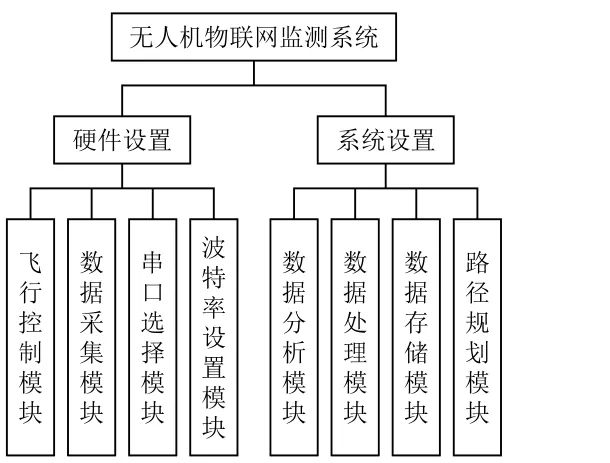
图1 系统功能图
1.1 需求分析
当前对环境数据的采集多采用传统方式,但这种方式在对某一区域进行监测时,需要在被监测区域的周围布置大量传感器节点以构成监控网络,大幅增加了成本,同时这些由大量传感器节点构成的监控网络目前还无法实现全覆盖,且性能不够稳定,常需要校正,长期暴露在自然环境中,寿命短,维护成本高。这些都是制约如今环境监测发展的重要因素,为使环境数据采集更精确、高效,文中提出了基于无人机的物联网监测系统。
为了最大程度采集准确的数据,监测系统多以无人机采集数据与PC端的数据管理系统为基础,能够实时、有效、快速地传输、保存数据信息,并能够对接收到的信息进行有效处理与分析,然后向工作人员反馈结果并给予一定的建议。在这个基础上,可以添加深度学习模块,方便在处理应急事件时能够以最快的速度做好预防工作并通知相关单位的应急处理人员。
1.2 整体方案设计
本设计使用无线传感网技术实现数据的采集与传输,该系统将ZigBee技术,C#与数据库结合,通过各传感器采集环境中的数据信息,之后数据管理系统将获取的数据存储到数据库中,并对数据进行有效处理与进一步分析,在深度学习系统中产生下一步预备方案,使整个监测系统更加智能化、人性化,方便用户实时了解环境信息。
图2所示为系统的整体架构。基于无人机的物联网监测系统主要由传感器、数据管理系统和自主飞行系统等组成。传感器放置于无人机上,主要负责数据采集,并通过无线传输模块将采集到的数据反馈到数据管理系统中。无人机可根据规划好的路线自主飞行,无需手动操控。信息采集完成后会根据规划的路线返回,以更加准确地采集环境中的信息。

图2 系统整体架构图
2 系统硬件设计
2.1 无人机技术
无人驾驶飞机简称“无人机”(UAV),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全或间歇地自主操作。其飞行状态、路线可控制,同时还可在大气层中航行。近年来,随着微小传感器、嵌入式微处理器、新型控制理论等的发展,一些世界军事强国在发展作战无人机和大型长航时无人机的同时,也在集中科研力量发展微小型无人机,许多科研机构在持续不断地研制无人机小型化,甚至微型化技术。通过搭载不同的设备,微小型无人机可执行通信中继、实施干扰、侦查监视、对地攻击、目标定位、损伤评估等军事任务,同时在气象探测、航空摄像、勘探测绘、核辐射探测、抗灾抢险、交通监控等民用领域也有广阔的市场前景。
本设计所开发的基于无人机的物联网监测系统主要组成部分包括STM32主控芯片、无刷电机、电调、三轴加速度陀螺仪、螺旋桨、简易机架、PCB电路板、阻容元件、USB摄像头、嵌入式硬件设备、各类传感器(振动传感器,红外传感器,压力传感器等)、通信模块、PC机终端。系统的整体设计思路如图3所示。
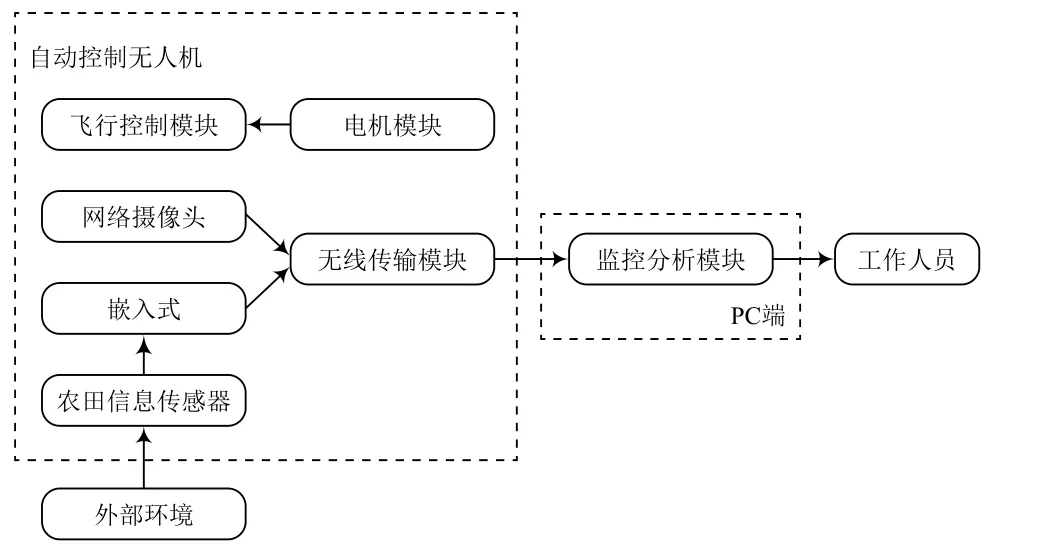
图3 系统整体设计思路
基于无人机的物联网监测系统的硬件部分主要由自主研发的四旋翼飞行器、机载智能航拍摄像头、无线传输设备、图像采集卡、图像处理计算机和监控计算机组成。
无人机飞行控制系统接收机输入装置接收给定轨迹命令并传输至飞行控制装置;定位装置获取无人机的地理位置并将其发送至飞行控制装置;传感器装置采集无人机的飞行参数并发送至飞行控制装置。
飞行控制装置输出电机控制信号至电调电机装置,控制电调电机装置调整无人机的飞行参数,实现对无人机位置和姿态的控制。
操作人员只需发送轨迹命令至接收机输入装置即可,无需实时观察无人机当前位置。飞行控制装置根据获取的信息控制电调电机装置调整无人机的飞行参数,可实时对无人机的位置和姿态进行调整,提高了控制精度。
2.2 传感器技术
传感器网络是由许多在空间上分布的自动装置组成的一种计算机网络。这些装置使用传感器协作监控不同位置的物理或环境状况(温度、声音、振动、压力、运动或污染物)。无线传感器网络的发展最初起源于战场监测等军事应用,而现今无线传感器网络被应用于很多民用领域,如环境与生态监测、健康监护、家庭自动化以及交通控制等。并且无线传感器网络是由大量密集部署在监控区域的智能传感器节点构成的一种网络应用系统,能实时监测、感知和采集节点部署区观察者感兴趣的感知对象的各种信息(光强、温度、湿度、pH值和有害气体浓度等),将其处理后通过无线网络发送给观察者。
机载传感器系统是四旋翼无人机飞行控制系统的重要组成部分,它为机载控制系统提供可靠的飞行状态信息,是实现四旋翼无人机自主飞行的重要设备。实现步骤如下:
(1)对ARM嵌入式控制器的功能进行二次开发,构建一个功能完善的机载控制器硬件平台;
(2)建立OE交叉编译环境,将控制程序的源代码经交叉编译后移植入ARM嵌入式系统运行;
(3)采集和处理机载传感器系统(微型姿态航向参考系统和声纳传感器)的测量数据;
(4)分析微型姿态航向参考系统在指定工作模式下输出的消息结构,建立Linux下基于串口异步通信的数据传输机制,实现四旋翼无人机飞行姿态和位置信号的采集与处理;
(5)基于I2C通信原理,通过Linux下的C++编程,获取声纳传感器数据,经处理得到四旋翼无人机低空飞行的高度信息;
(6)基于UDP网络传输协议编写服务器(四旋翼无人机)和客户端(地面监控系统)的数据通信程序,实现四旋翼无人机飞行数据的无线传输与存储。
作为发送端的树莓派将拍摄到的图像传送到接收端,经处理后传送到后台并反馈。
根据预先测绘的航线与设定的飞行参数,让无人机实现一键起飞,并按照预定航线飞行和降落,内置高精度GPS,支持不规则区域边界的快速测绘。
3 系统软件设计
3.1 开发环境及开发语言介绍
本设计的系统界面开发使用名为Microsoft Visual Studio 2010 C#的开发软件。Visual Studio 2010是微软公司推出的C#开发环境,也是目前最流行的Windows平台应用程序开发环境。Visual Studio 2010是一个比较简单的界面设计软件开发工具,其主要功能是将面向对象的语言转变为面向机器的语言,界面设计可视化,操作简单灵活,目前分为专业版、高级版、旗舰版、学习版和测试版共五个版本。
3.2 登录注册界面设计
登录注册界面功能包括用户登录和新用户注册,并添加了记住密码和自动登录功能。新用户可直接注册,输入手机号和密码,注册成功后输入用户名和密码即可登录,也可选择记住密码并自动登录。登录注册界面如图4所示。
3.3 数据管理设计
数据管理的主要功能包括查询、删除、更新、添加等。主界面用以显示采集到的数据(二氧化碳、氮气、PM2.5等),并以曲线图的形式呈现在页面中。在数据出现异常时会标记并分析异常出现的原因,当下次出现类似情况时,可利用深度学习自动处理。
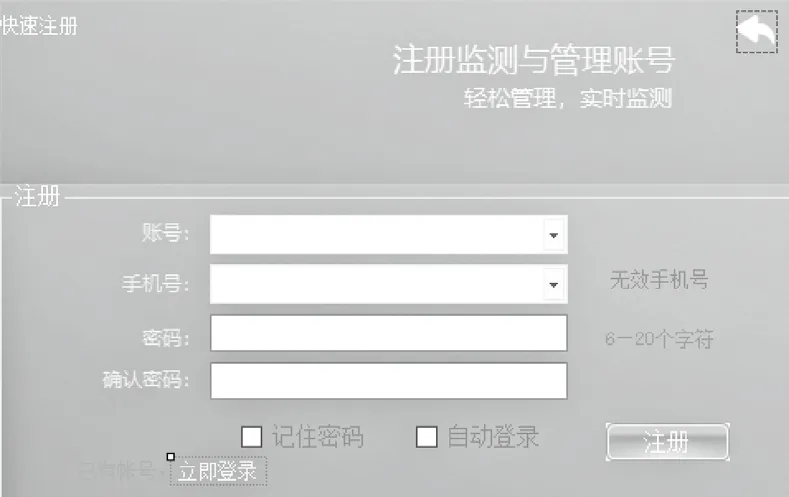
图4 登录注册界面
4 结 语
无人机因其作业周期短,效率高等优势,将在物联网中扮演重要的角色。本文详细介绍了一款基于无人机的物联网监测系统,经过一段时间的运行调试,目前系统各功能已基本实现,同时还可根据不同地区的情况,实时有效地采集各类信息,掌握精准数据。无人机实物如图5所示。从长远来看,这种方案在未来物联网的发展中将会被广泛使用,在降低成本的同时,提高采集信息的灵活性及数据的准确性。

图5 实物图
猜你喜欢
党的生活(黑龙江)(2022年4期)2022-04-25
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
电子制作(2018年23期)2018-12-26
通信世界(2018年27期)2018-10-16
电子制作(2016年15期)2017-01-15
北京航空航天大学学报(2016年8期)2016-11-16
风能(2015年10期)2015-02-27
单片机与嵌入式系统应用(2014年9期)2014-03-11