
高精度转台的分析与设计
2018-11-16 03:59苏芬平崔伟
传感器世界 2018年7期
苏芬平 崔伟
1.北京航天科颐技术有限公司,北京 100091;2.中国航天科工集团第二研究院206所,北京 100854
一、引言
转台被广泛应用在航空航天等领域,比如对雷达的方位角与俯仰角的控制;模拟各种载体的偏航、俯仰、横滚等姿态。转台的综合性能直接影响到设备测试结果的可靠性和精确性,对航空航天产品和武器装备的系统性能以及运行精度起到了至关重要的作用[1]。本文以某高精度二维转台为工程背景,对高精度直驱转台进行了设计和研究。
在高精度转台设计中,首先考虑在机械结构上减小传动机构对轴系精度的影响,其次在伺服控制中运用先进的控制方法,提高系统的整体精度。
在本转台设计中选用力矩电机直接驱动负载的方案,既消除了齿隙回差(无回差),又缩短了传动链,使机械结构简单紧凑,使控制系统具有反应速度快、线性度好、共振频率高等优点,因而提高了系统的稳定性及静态、动态控制精度。
二、转台整体方案
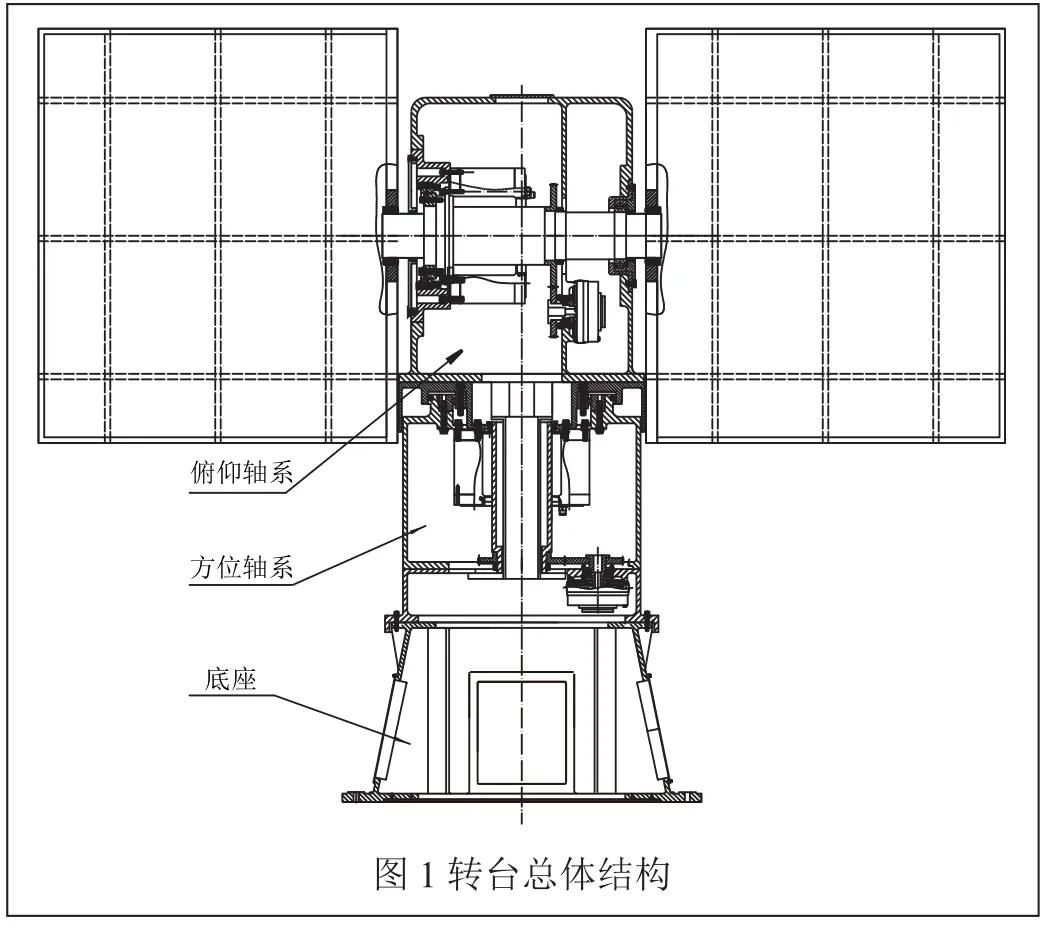
转台主要有俯仰轴系、方位轴系、底座组成,转台总体的结构形式如图1所示。
三、方位轴系设计
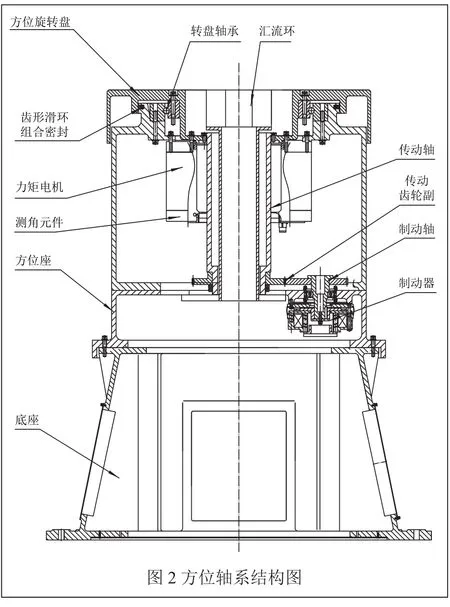
方位轴系主要承载俯仰部分及负载,带动俯仰部分及负载实现360°连续转动。方位轴系由方位轴、轴承、方位座、汇流环、电机、测角元件、制动器等组成,参见图2。
1、方位轴系的结构设计
方位轴系的结构必须满足下述要求:
(1)结构设计需满足高精度要求:由于转台要求定位精度 0.01°(36″),系统回差 0.009°(32″),对于高精度的大功率系统,除伺服系统中选用高精度的测角器件外,方位轴系采用无刷直流力矩电机直接驱动,彻底消除传动链造成的误差和回差;
(2)结构设计需满足大的倾覆力矩要求:转台的负载是两个天线,最大负载时,每个天线250kg,尺寸3m×1.5m×0.4m,安装于方位轴两侧。天线迎风面积较大,八级风情况下,风对天线产生的作用力达到3.7kN,十二级风情况下,风对天线产生的作用力达到9.2kN,对方位轴承处产生的倾覆力矩达到5.5kNm。因此在方位设计中,选用高精度转盘轴承用于承受大的倾覆力矩,以及大的轴向力和径向力。
2、方位驱动力矩计算
方位力矩主要包括惯性力矩、摩擦力矩。选用电机和轴承时,还要用到倾覆力矩,以及轴向力、径向力。
根据技术要求,转台方位速度最高为400°/s,最大 加 速 度 为 120°/s2, 即 负 载 角加 速 度ε=120°/s2=2.1rad/s2。
根据结构设计可以计算出方位运转时总的转动惯量,其中,负载两个125kg负载,转动惯量为480kgm2;其他旋转部件质量为200kg,转动惯量为410kgm2。则方位运转时总的负载转动惯量为:
J=480+410=890(kgm2)
方位运行时的惯性转矩为:
MJ=Jε=890×2.1=1869(Nm)
另有:摩擦力矩Tm=60Nm(按转盘轴承给出的启动力矩计算)。
根据以上计算,方位峰值力矩为:
T=MJ+Tm=1869+60=1929(Nm)
方位连续力矩主要为摩擦力矩,并考虑留有一定的余量,则选择电机的连续力矩大于200Nm。
3、转盘轴承选型及计算
(1)转盘轴承结构形式选择


转盘轴承根据结构形式可分为四点接触球转盘轴承、双排角接触推力球转盘轴承、交叉圆柱滚子转盘轴承、交叉圆锥滚子转盘轴承和三排圆柱滚子组合转盘轴承等不同的结构形式。根据本产品的受力大小和结构形式,选用四点接触球转盘轴承,它具有结构紧凑、重量轻、摩擦力小等特点[3]。
四点接触球转盘轴承由两个座圈组成,钢球与圆弧滚道四点接触,其外形如图3所示,其结构和安装方式如图4所示。
(2)转盘轴承计算
根据技术指标,经计算:方位轴承载轴向力Fa为15kN,12级风产生的径向力Fr=9kN,倾覆力矩M=9.5kNm,同时考虑方位轴刚度和支撑部位等因素,最终所选转盘轴承的基本参数为:外径Φ410mm,内径Φ260mm,滚道直径为Φ335mm,厚50mm,精度P5级。
四、俯仰轴系设计
俯仰轴系位于方位轴系之上。俯仰轴系由俯仰电机、俯仰支架、俯仰轴和转盘轴承、限位开关、负载安装板等组成。俯仰结构简图如图5所示。
1、轴承计算及选型
根据技术指标,经计算:俯仰轴承载经向力Fr为9kN(含最大负载及安装件),倾覆力矩
5.4kNm。同时考虑俯仰轴刚度和安装空间等因素,最终所选转盘轴承与方位相同。
2、制动器选型及安装
为了防止断电状态下,转台在外力作用下自行转动,方位和俯仰系统都装有机械锁,转台停止工作后,人为将锁销插入锁孔。除机械锁外,为防止转台在停机状态下自行转动,还装有电磁制动器。电磁制动器断电锁紧,通电解锁。制动器电源的通断,由伺服驱动器控制。制动器附带有手动释放杆,可在断电状态下通过人工拨动释放杆,使得摩擦片分离脱开。便于断电状态下需要解除制动时使用。
由于空间原因,制动器不能直接安装在驱动轴上,需经过一级齿轮减速传动,安装在制动轴上。同时,经过减速可以增大对驱动轴的制动力矩。
方位、俯仰轴系的制动器选为同样型号。在断电情况下,制动器只要克服不平衡力矩和风力造成的负载转动即可。选择参数为:制动扭矩200Nm,经2.38的减速比,可制动476Nm。电磁铁驱动电压90VDC,允许最大转速800rpm。
3、胀紧套计算及选型
胀紧连接是轴和轮毂之间,放置一对或多对与内、外锥面贴合的胀紧连接套(简称胀套),在轴向力作用下,外环胀大,与轴和轮毂紧密贴合,产生足够的摩擦力,以传递转矩、轴向力或两者的复合载荷[4]。
胀套连接的定心性好,装拆或调整轴与轮毂的相对位置方便,没有应力集中,承载能力高,使用可靠,长寿命,免维护,无间隙,具有密封作用。
目前在市场上,胀套作为一种标准组件可供选择和购买。胀套一般按传递的载荷、结合面的粗糙度以及被连接件的尺寸进行选择。

根据安装尺寸及俯仰传递的峰值力矩,并考虑留有一定的安全系数,选用BUSH-B-ф160×ф210型号的胀套,其额定轴向力422kN,额定扭矩为33.75kNm。
五、底座设计
转台通过底座固定在地基或其他载体上。并通过调平装置进行转台的调平。底座为锥形结构,在减轻重量的同时保证底座的刚度和强度。充分利用底座内部空间,安装电气件。底座设计连接器安装板,用于维修内部器件和安装连接器等。
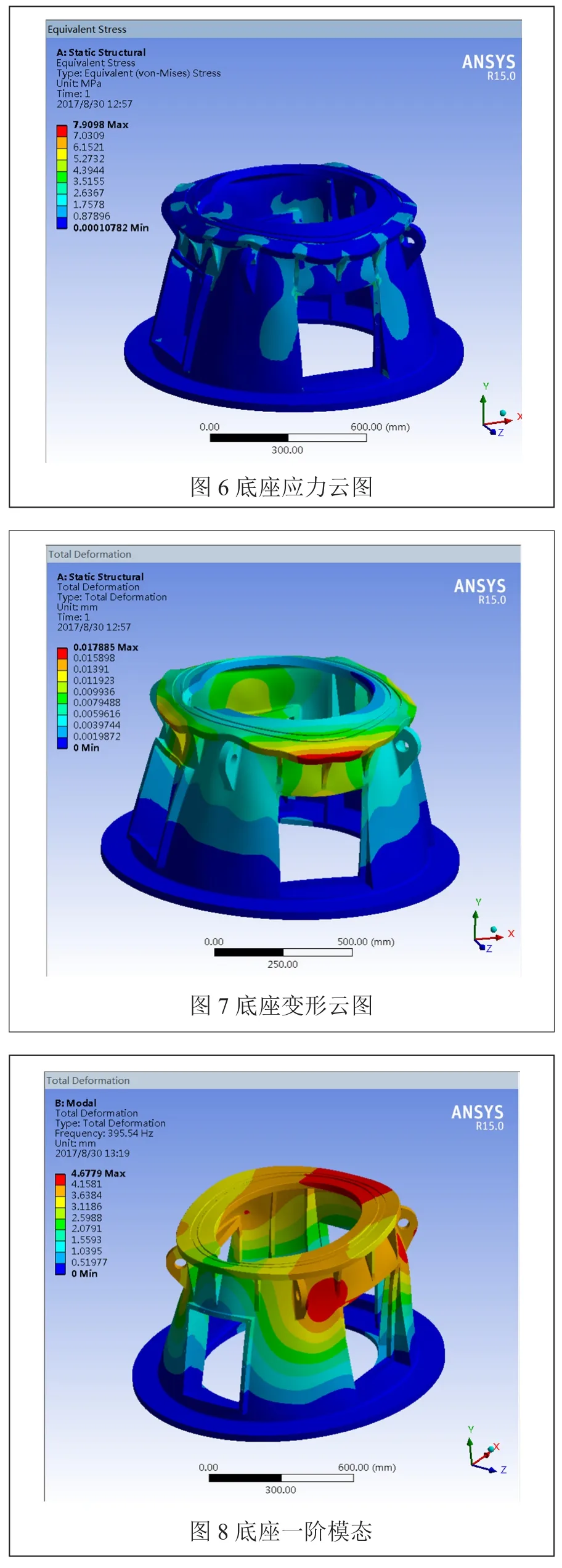
底座为整个转台的安装基础,对强度刚度进行有限元分析[2]。底座的应力云、变形云图如图6、图7所示。
由以上分析可以看出,底座的最大变形为0.018mm,最大应力为7.9MPa,远低于铸造铝合金的许用应力值,满足强度刚度要求。
在转台工作过程中,为了避免谐振出现和由此而造成设备损坏[5],要求机械结构的固有频率远离系统的带宽要求。
对底座进行模态分析,其一阶模态振型如图8所示。其中一阶模态频率为396.54Hz。由于转台系统截止频率要求为60Hz,远远低于系统的一阶模态频率。
六、安全性设计
为了保证设备使用安全可靠、操作简便,预防由于载荷过大、突然断电、操作不当以及其他意外事故,造成被测负载或其他设备的损坏,在转台设计中采取了各种安全保护措施[6]。
转台方位轴360°连续转动,不需要安装电气限位和机械限位。主要针对俯仰轴系设计电气限位和机械限位。
在俯仰轴系设计时,均设计有软件限位、电气限位以及机械限位。软件限位角度最小,电气限位角度次之,机械限位角度最大。若软件限位失效,转角超出规定值,光电感应开关感应,驱动器控制电机停止运动。若电气限位失效,还有机械限位装置限位,考虑到轴系转角范围有限,机械设计时,采取金属挡块的结构,挡块前端装有吸能缓冲垫用于缓冲,机械限位装置结构简单、可靠实用。
1、电气限位
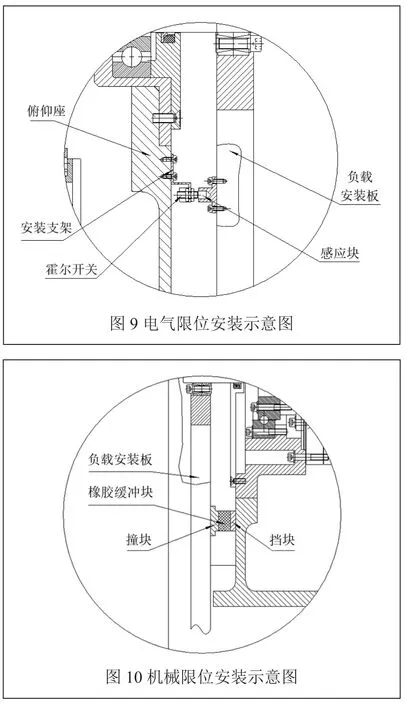
转台的俯仰电气限位装置由安装在俯仰座上的霍尔开关和安装在负载安装板上的感应磁柱组成,实现-5°~+185°的限位。结构形式如图9所示。
转台的俯仰电气限位装置由两个霍尔开关和一个感应磁柱组成,霍尔开关分别安装在俯仰座-5°和185°位置,感应磁柱安装在负载安装板上(转动部分)。俯仰轴转动,实现-5°~+185°的限位。安装结构形式如图9所示。
2、机械限位
俯仰机械限位采用机械挡块方式,档块安装在俯仰座的侧面,上下各一个,大约在-10°和+195°位置,在挡块面上安装橡胶缓冲器,缓冲器的行程约为2°,用于撞击瞬时吸收部分动能;撞块安装在负载天线安装板上。结构形式如图10所示。
3、自锁设计
为了防止断电状态下,转台在外力作用下自行转动,方位和俯仰系统都装有机械锁,停止工作后,人为将锁销插入锁孔。除机械锁外,为防止系统在短暂停机状态下自行转动,还装有电磁制动器。电磁制动器断电锁紧,通电解锁。通过直流电进行控制,制动器断电时,摩擦片被压紧,动力轴被制动固定;制动器通电时,摩擦片分离脱开,动力轴可自由旋转。制动器电源的通断,由伺服驱动器控制。
4、紧急制动与报警功能
转台设置紧急制动开关,在发现紧急情况时,人为触动此开关,使系统迅速停止工作。
此紧急制动开关与控制箱上的开关互锁,即该开关工作时,其他开关不起作用,只有再拨动该开关使其复位,其它控制开关才有效。
在转台底座部位安装有声光电报警器,在转台需要启动时,声光报警器发出警示声音及灯光闪烁,提示周边工作人员撤离,经确认转台可以启动后,操作人员关闭声光报警器,启动转台开始工作。
在转台和控制箱的明显部位安装故障报警器,当转台出现故障时,发出警报。
七、结论
本文设计了一种高精度二维转台,转台方位俯仰均通过力矩电机直接驱动,消除了传动链的传动误差,实现了转台高精度回转。在转台设计中,高精度转盘轴承的使用提高了转台的承载能力,并使转台结构简化。采用电磁制动器和齿轮副进行方位轴和俯仰轴的制动,起到断电制动作用。转台设计中充分考虑软件、电气、机械限位及报警功能,提高了安全性。为高精度通用转台的设计提供了解决方案。
猜你喜欢
防爆电机(2022年3期)2022-06-17
机电信息(2022年9期)2022-05-07
防爆电机(2020年3期)2020-11-06
电子制作(2019年14期)2019-08-20
船舶标准化工程师(2019年4期)2019-07-24
中国特种设备安全(2019年3期)2019-04-22
舰船科学技术(2016年1期)2016-02-27
船海工程(2015年4期)2016-01-05
西藏科技(2015年2期)2015-09-26
汽车科技(2015年1期)2015-02-28
