中低速磁浮车载ATP定位系统的设计与实现
2018-11-16 02:39:04王成
铁路通信信号工程技术 2018年10期
王 成
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
1 概述
中低速磁浮轨道交通是城市轨道交通中的新技术。它具有环保、安全性高、爬坡能力强、转弯半径小、建设成本低等优点,适用于城市市区、近距离城市间和旅游景区的交通连接,可替代轻轨和地铁。
MATC系统是配套国内中低速磁悬浮制式列车研究而研制的列车自动控制系统。MATC系统是基于交叉感应环线的移动闭塞列车自动控制系统,采用交叉感应环线实现车地通信和列车的定位校正,并通过交叉感应环线向地面发送列车位置,用于区域控制器跟踪在线运行的所有列车,并将该信息用于计算后行列车的移动授权,通过交叉感应环线发送给列车,用于控制列车运行。
车载ATP子系统是根据地面信息和机车信息实现防止列车超速运行,保证列车行车安全的自动控制系统。MATC系统结构图如图1所示。
2 定位系统设计与实现
通常情况下,车载ATP系统采用应答器进行列车定位。

图1 MATC系统构成示意图Fig.1 Structure of MATC system
车载ATP根据接收到的应答器信息,结合车载电子地图,查找列车所在轨道信息。车载ATP通过两个连续接收到的应答器信息判断列车的行驶方向。然后,通过车载测速测距单元计算列车所在位置。车载ATP根据进路信息计算列车运行轨道信息,计算期望应答器和接收窗口。车载ATP接收到应答器后,判断当前应答器是否是期望应答器,并判断当前应答器是否在期望接收窗口内,如果是期望应答器且在期望应答器接收窗口内,车载ATP根据车载电子地图中应答器位置校正列车位置,否则不进行位置校正。
MATC车载ATP子系统主要依靠交叉感应环线边界及固定位置交叉点进行列车定位及位置校正。
2.1 位置初始化
车载ATP通过交叉感应环线获取列车所在环线,根据预存的车载电子地图,获取当前环线的区域编号、环线编号、长度、坡度、弯道、限制速度、交叉点位置、停车点位置。
列车经过环线边界,车载ATP按照前后顺序分别检测到两个相邻环线编号,且收到两个环线边界的时间差小于阈值后建立预定位。车载ATP通过检测相邻两环线区段的先后顺序,确定列车在线路中的运行方向。车载ATP通过对照电子地图中环线区段边界的位置,确定列车的初始位置。预定位状态中在窗口内收到第一个交叉点此过程中未发生可导致定位丢失的事件。
列车建立预定位后,车载ATP在新环线接收到第一个交叉点后,判断该交叉点是否在正确的交叉点接收窗口内,如果交叉点在接收窗口,车载ATP根据电子地图中交叉点的位置确定列车在线路中位置,车载ATP完成定位。
2.2 位置更新
车载ATP系统完成列车位置初始化后,实时计算更新列车位置,具体流程如下。
首先,列车在本环线,未进入下一环线,车载ATP根据车载测速测距单元周期报告的速度距离信息,实时计算列车在环线中的位置。
其次,列车进入下一环线,车载ATP接收到地面环线新环线的区域编号和环线编号。车载ATP通过地面ZC获取前方进路代码,结合车载电子地图计算列车前方进路,计算新环线的区域编号和环线编号。将获取的新环线的区域编号和环线编号和计算的新环线的区域编号和环线编号进行比较,如果新环线的区域编号和环线编号相同,更新列车在新环线的位置。
最后,更新列车在新环线的位置有两种情况。第一种情况,列车在旧环线中的环线偏移量大于旧环线长度,车载ATP将旧环线偏移量大于旧环线长度的差值补偿到新环线的偏移量中。第二种情况,列车在旧环线中的环线偏移量小于旧环线长度,车载ATP将经过环线边界的通信时间间隔乘以当前列车速度补偿到新环线的偏移量中。
2.3 位置校正
车载ATP系统依靠交叉感应环线固定位置交叉点进行列车定位及位置校正,具体校正流程如下:
首先,列车进入新环线,车载ATP通过车载电子地图计算本环线交叉点的位置信息;
其次,车载ATP通过地面环线获取地面交叉点信息,车载ATP记录获得交叉点的位置信息和时间信息,并根据交叉点的位置信息和时间信息极端得到交叉点的精确位置;
再次,车载ATP计算接收到的交叉点的期望窗口,如果在期望交叉点的接收窗口内,车载ATP根据车载电子地图中交叉点的位置校正列车位置。如果不在期望交叉点的接收窗口内,车载ATP不进行位置校正。
然后,车载ATP如果没有在期望交叉点的接收窗口内接收到期望交叉点,车载ATP根据车载电子地图获取下一个期望交叉点位置和期望窗口,如图2所示。
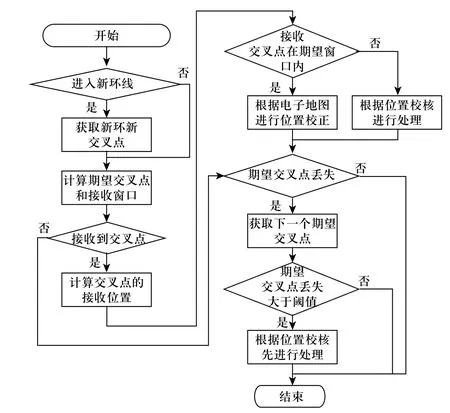
图2 交叉点位置校正流程图Fig.2 Flowchart of position correction of crosspoints
2.4 位置报告
车载ATP在建立定位后把列车位置向地面报告列车位置,车载ATP向地面描述某位置的方式为“车头走行方向+环线区段编号+沿车头走行方向”进入轨道的偏移量。
2.5 位置校核
车载ATP系统实时对列车位置进行位置校核,具体校核方法如下。
第一,车载ATP系统计算列车的定位误差,车载ATP结合测距误差、测速测距单元启动和停车过程中测距误差实时计算列车安全包络。车载ATP经过车位位置校正后,重新计算列车定位误差。当列车定位误差大于阈值时,车载ATP丢失定位。
第二,车载ATP系统实时检核列车在环线中位置。当列车在环线中的位置小于本环线长度大于一定阈值,或列车在环线中的位置大于本环线长度大于一定阈值,车载ATP认为位置计算错误,车载ATP丢失定位。
第三,车载ATP实时检查接收到的列车所在环线编号,当车载ATP接收到的环线编号发生跳变,与车载ATP计算得到的期望环线不一致,车载ATP根据进路计算列车位置跳变的距离,如果列车跳变的距离大于一定阈值,车载ATP应丢失定位。
第四,车载ATP实时计算地面交叉点的丢失个数,当交叉点丢失个数大于阈值,车载ATP应丢失定位。
第五,车载ATP在期望窗口内接收到交叉点,计算比较列车实际接收到的交叉点的位置和期望交叉点的位置,如果两个位置大于一定阈值,车载ATP应丢失定位。
第六,车载ATP在期望窗口外接收到多余交叉点,车载ATP应丢失定位。
第七,车载ATP在期望窗口内接收到多余交叉点,车载ATP应丢失定位。
3 测试
结合北京轨道交通门头沟线(S1线)的建设,本测试基于北京S1线进行现场测试。车载ATP实时计算列车位置,与S1线实际线路中的标定位置进行比较,验证车载ATP定位系统的安全性和有效性。
经过北京S1线现场测试,研发人员对测试数据进行分类详细分析。分析结果表明,车载ATP定位系统在加速、减速和匀速运动过程中,列车位置初始化、位置更新、位置校正、位置报告、位置校核符合MATC系统的安全要求和系统要求。车载ATP能正确的进行列车位置初始化,列车位置更新时,列车位置误差在25 km/h以下时小于0.5 km/h,25 km/h以上小于2%。车载ATP进行位置校正时,列车位置与实际位置在1 m以内。分析结果如图3所示。

图3 车载ATP定位数据分析Fig3 ATP positioning data analysis
4 结论
通过北京S1线现场测试和数据分析,证明车载ATP定位系统符合MATC系统的安全要求和系统要求,具有较高的可用性。
猜你喜欢
猪业科学(2024年1期)2024-02-27 10:14:24
军事文摘(2022年18期)2022-10-14 01:33:10
小学生学习指导(中年级)(2019年3期)2019-04-10 01:58:06
中国公路(2017年6期)2017-07-25 09:13:58
测绘科学与工程(2017年5期)2017-05-07 06:30:46
中学生物学(2016年8期)2016-01-18 09:08:18
中国教育技术装备(2015年21期)2015-03-11 20:16:06
中华建设科技(2014年6期)2014-08-27 04:16:40
筑路机械与施工机械化(2014年3期)2014-03-01 02:58:03
测绘科学与工程(2014年4期)2014-02-27 07:06:05