基于ATO控车技术的CTCS-2级列控系统研究与应用
2018-11-16 02:39:08刘人鹏
铁路通信信号工程技术 2018年10期
刘人鹏
(北京全路通信信号研究设计院集团有限公司,北京 100070)
1 概述
中国经济的快速腾飞,催生了一系列经济发展迅速的城市群区域经济,如珠三角、京津冀等发达地区,该地区大量人财物迅速聚集,带来了区域内交通出行的严重拥堵,需要一种连接城市群内部城市之间的站间距较小、列车出行时间间隔较短、能频繁往返运行的新型列车,研发人员把地铁的运行模式改进升级成能适应城市群运营的新模式,由此出现了城际铁路。其中,京津城际铁路作为全国第一条引进合作建设的城际高速铁路,于2008年奥运会前正式启用,为奥运会圆满举办和人员的合理疏散带来了极大方便,极大地缩短了京津城际间的“距离感”。城际铁路有别于传统高速铁路是服务于邻近城市间或城市群间,设计时速一般不小于160 km,线路长度不大于200 km的快捷、高效、密集型的高速铁路,而现有CTCS-2列控系统不能完全适应城际铁路列车行车安全和高效运输的要求。为此,中国铁路通信信号股份有限公司研发了基于ATO控车技术的CTCS-2级列控系统(简称C2+ATO列控系统),有效满足了城际铁路高密度、高强度、跨线运行的实际需求。
2 C2+ATO列控系统
C2+ATO列控系统在满足CTCS-2级列控系统标准基础上,借鉴了地铁ATC系统的系统特点,研发出了适用于160 km以上速度、3 min追踪间隔、自动驾驶运行的满足城际铁路需求的新型列控系统,下面重点介绍C2+ATO列控系统在CTCS-2级列控系统上新增设备的系统结构、新增功能说明及运用模式。
2.1 系统结构
如图1所示,在CTCS-2列控系统基础上增加了子系统后的地面设备和车载设备。其中地面设备增加了CCS通信控制子系统、站台门控制子系统和GSM-R/GPRS无线通信网络模块以及股道专用精确定位应答器等;车载设备增加了ATO自动驾驶子系统和MT移动终端和车门控制模块。在保证既有C2列控系统设备较少改动的情况下,上述新增地面设备和车载设备与既有设备通过系统优化融合形成一个C2+ATO的自动驾驶列控系统。
地面设备中,CTC子系统只增功能不增设备,在实现既有功能前提下还要实现发送运行计划、实时管理在线列车、自动调整运行计划等功能;TCC子系统只增功能不增设备的前提下,增加车门/站台门联动控制和站台门防护功能;新增CCS子系统完成站台门门控信息管理、站台门命令/状态转发、运行计划处理和转发、站间数据存储调用发送等功能;新增车站股道精确定位应答器实现列车精确定位的功能;新增站台门控制系统实现站台门的开放与关闭。
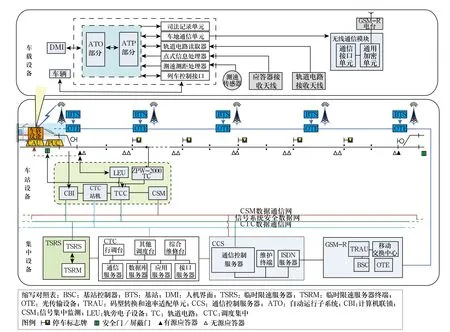
图 1 C2+ATO系统结构示意图Fig.1 C2+ATO system structure
2.2 模式转换
C2+ATO自动驾驶列控系统的工作模式分为两大类:人工驾驶和自动驾驶。其中,车载设备ATP实现列车人工驾驶,再按C2列控系统常规的9种工作模式运行,ATO实现列车自动驾驶;当车载设备ATP处于完全监控模式(FM)下,同时满足如图2所示的3个条件并在司机确认后ATO即接过控车使命进入AM模式下运行。
如图2所示,ATP转ATO首先需要处于人工驾驶的完全监控模式下并且同时满足3个与条件,当ATP处在人工模式的其余8种工作模式下均无法转入ATO自动驾驶模式,而ATO转ATP只要满足图2中的一个或条件,说明转入自动驾驶的条件对设备工作状态要求更加严苛,一旦有条件不满足即迫使司机转回人工模式运行,同时在转换的过程都有一个需要司机确认的环节,以提醒司机将要进入何种模式下运行;若司机未确认,又分两种情形处理:ATP转ATO时,未确认就会有声光提示信息以一定时间间隔提示司机;ATO转ATP时,未及时确认就会输出常用制动,确认后缓解该制动。

图2 ATP与ATO相互转换条件示意图Fig.2 Conditions of Mutual transformation between ATP and ATO
由此可见,在人工驾驶与自动驾驶的相互转换时,都需要司机有一个“确认”的动作,也是提示司机将要进入的是何种驾驶模式,如果司机因其他原因忘记确认就会一直提示或输出常用制动引起司机注意。当列车转入人工驾驶模式后,即进入CTCS-2级列控系统既有的9个工作模式适应不同场景下运行。
2.3 系统优势
2.3.1 自动驾驶模式
1)区间运行时,车载设备ATO系统会依据地面设备上传的运行计划或按照预选驾驶策略,自动控制列车进行各种不同的操作如加速、减速、巡航、惰行和停车,实现自动运行;期间,司机的任务主要是瞭望前方与观察DMI屏幕有无异常报警信息提示。
2)进站停车时,车载设备ATO通过BTM读取器获取股道上的精确定位应答器(JD)的定位信息后即刻对列车位置进行校正,并根据JD应答器提供的运营停车标信息确定本股道运营停车标的精确位置和站台门门侧信息,运算处理后自动控制列车在车站股道停车标处精准停车;ATO系统判断列车停准停稳后,对车门/站台门启动联动控制。ATO收到运行计划时自动开门;未接收到运行计划时,由司机开启相应侧的动车组车门。动车组关门仍需司机与车长联控后人工操纵;而ATP则根据接收到的站台侧信息根据不同情况实现对动车组车门的开门防护。
3)自动折返功能,ATO子系统新增了自动折返作业功能,在自动驾驶模式下通过控制动车组切换牵引端实现该功能,该功能极大地节省了换端时的各种操作时间,实现快速折返。
2.3.2 人工驾驶模式
列车处于人工驾驶模式发车时,车门/站台门均不参与联动控制,由司机关闭车门,车站人员关闭站台门,人工通过无线对讲完成车门/站台门关闭的确认。人工驾驶模式增加了司机的作业数量与相互确认频次。
3 系统改进
基于ATO控车技术的CTCS-2列控系统很好解决了行程短、站间距短、上下车频繁、折返作业多的运输要求,也降低了列车司机的疲劳驾驶,减少了司机的操作步骤,提高了司机的注意力,但在已开通运营的城际列车线路上发现了一些需要改进与完善的地方。本次着重谈地面设备的改进方案,从以下两方面入手,如功能相近子系统的合并优化,个别子系统的结构升级优化等。
3.1 TCC与CBI合并
如图1所示,从C2+ATO列控系统的系统结构上发现,TCC子系统与CBI子系统间有功能重复使用与信息代传的现象,而这些代传信息也是两个子系统间容易出错的问题点,为此,列控中心(TCC)与计算机联锁(CBI)两个子系统可以合二为一成一套“地控”子系统作为地面设备安全控制子系统,从而既降低了因站场要求码位修改引起另一个子系统的码位修改,又减少了各站与安全数据网的接点数量。如图3所示,去掉一套TCC或CBI子系统,每个车站可减少交换机上8个接点,交换机上接点数量减少也意味着故障率的降低,同时,也减轻了安全数据网上的数据传输压力,还可以把计算机室的6~8个机柜减小到2~3个机柜,精简每个车站计算机房的占用空间。

图3 交换机接点配置Fig.3 Switches contacts configuration
3.2 TSRS与CCS合并
新增的通信控制子系统(CCS)从其完成的功能上看可与既有临时限速服务器(TSRS)子系统合二为一,通信控制子系统主要完成站台门联动控制、运行计划与站间数据存储转发等功能,TSRS的功能是针对现场实际情况对不同区间的不同区段进行限速设置,TSRS本身功能单一,子系统结构也是服务器型式,跟通信控制子系统的系统结构相近,配置要求也相近,一般对应4~5个车站设一套CCS子系统和一套TSRS子系统,为此,可考虑CCS子系统与TSRS子系统合并研发,可再次减少与安全数据网上的交换机接点数量。
3.3 CBI研发升级
CBI子系统升级发展已迫在眉睫,目前全路在用的CBI子系统已应用在现场十几年,虽然跟6502继电式集中联锁控制相比优化许多,也节省了许多继电器的用量,但随着电子元器件的不断发展升级,大功率器件已广泛应用在各领域,应尽早研发全电子控制系统,进一步缩减机械室内继电器用量。由此引起的革新会节省大量机械室设备数量,减小信号机械室的占用空间,更重要的是减轻了信号工的维保强度与难度,最终减少信号工的用工数量,进一步降低各种维护成本和人力成本。
通过上述3个优化方案,安全数据网上原本传输4个子 系 统(TCC、CBI、CCS和TSRS)的数据减少为只传两个子系统的数据,系统优化后形成如图4所示的地面设备结构。随着技术水平的不断提高和硬件系统的不断升级,功能相近的子系统进行合理的结构归纳、功能融合,避免重复利用,保持整个列控系统的系统结构简洁和系统功能完善,确保复杂枢纽中心的网络优化更加简单,减少网络接点,降低网络故障,以更加安全可靠的列控系统服务于高铁运营。
4 应用中问题
莞惠城际已开通半年有余,在联调联试期间与开通运营中发现了一些问题,值得分析研究,减少今后C2+ATO列控系统城际项目再出现类似问题。
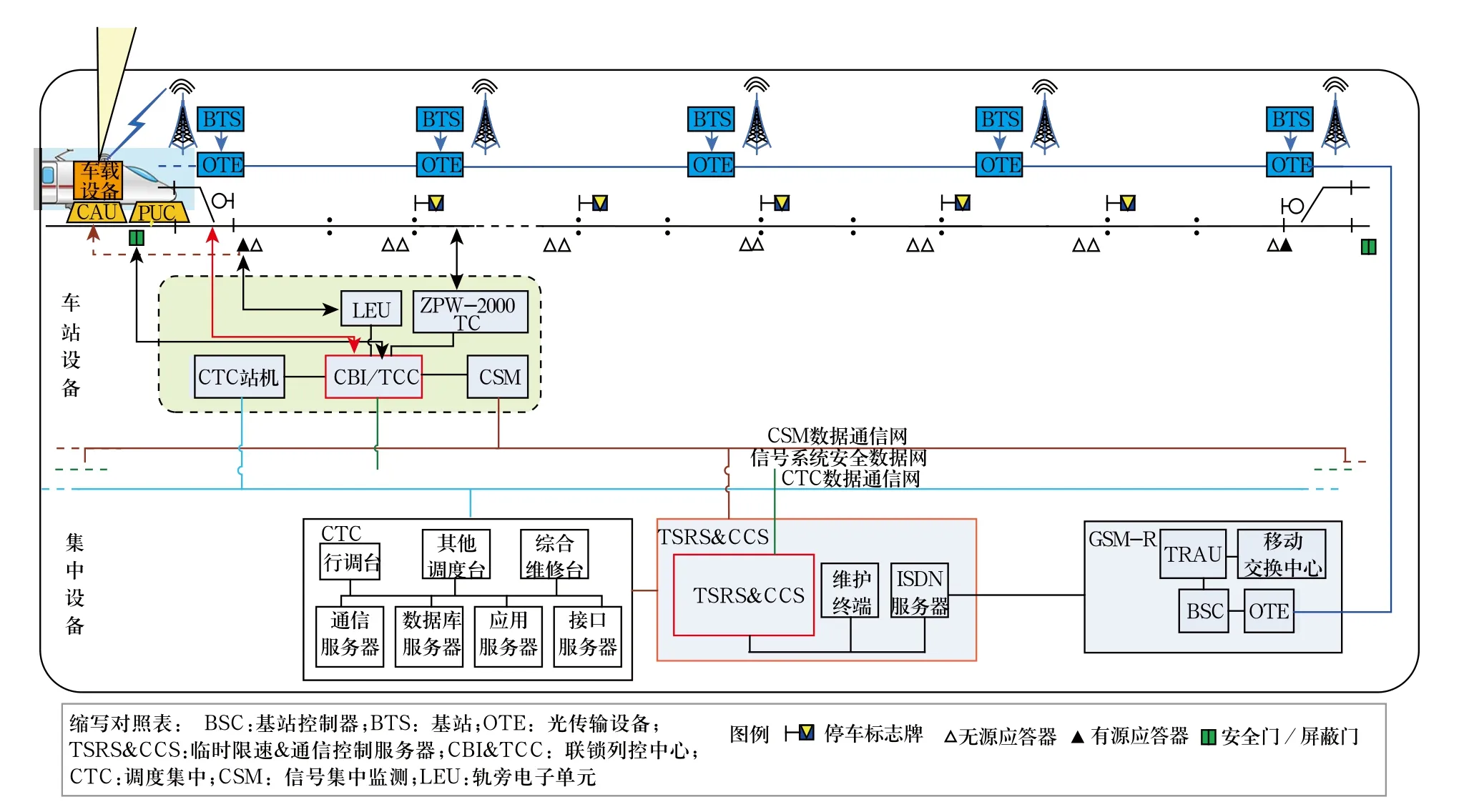
图4 完善后的地面设备示意图Fig.4 Ground equipment after optimization
4.1 车载设备收到A/B码不一致时易引起车载设备死机
车载ATP设备引用国外理念,把核心安全软件采用A/B双代码开发,意在提高列车高安全性与高可靠性,列车运行中遇到A/B代码采集不一致时,以ATP死机的安全模式强制紧急制动列车,这个方法虽然干脆直接倒向安全,但因死机引起的重启以及列车数据输入与呼叫等操作步骤,会严重影响运行效率。通过在城际线路上分析发现,遇到折返作业时就容易收到A/B代码不一致引起ATP死机,而在长大干线上,很少有城际线路上这样的频繁的折返作业,因此,长大干线上运行的列车很少有“死机”现象发生。
分析“死机”现象过程如下:城际列车从死机时车载设备采取的紧急制动到ATP系统重启需要至少5 min左右,重启之后司机需要重新输入确认数据、选择驾驶模式、呼叫连接TSRS和CCS两个子系统等,又要几分钟,统计可在10几分钟左右,对此时间长度已影响了城际列车频繁折返作业的效率;从已开通城际项目上的各项指标上分析都处于正常值,没有无线信号衰弱或不满足要求的情况,为此出现A/B代码不一致的因素确系很难判断,但从系统软件研发上可以防止遇到车载ATP通过GSM-R无线网络收到A/B码不一致时“死机”现象,改为紧急制动而非死机,制动过程中由司机确认前方状况,再选择相应驾驶模式运行,如此处理可省去5~7 min时间。
4.2 自动停车不准
在莞惠城际项目上自动停车位置不准确是个通病,几乎每个车站的停车位置都不太准确,这有两方面原因造成的:一是由于不同车型的测速测距不够精确或者精确度偏差引起的测距不准,二是由于站台布置精确定位应答器时的位置不够准确,很多安装JD应答器时以为跟区间应答器的精度一样,为此,要明确基于CRH6型动车组参数布置,JD应答器的安装精度控制在±0.1 m以内;另一个参数是JD应答器中心与站台门活动门中心间距离测量数据精确到0.1 m。在安装JD应答器时能满足上述两项精度要求后,基本都能满足自动停车要求。
5 小结
本文介绍了C2+ATO自动驾驶列控系统与既有CTCS-2级列控系统的区别之处,同时,根据国内外列控系统发展的趋势,提出列控系统的优化解决方案,期待能对研发人员、软件编制人员、项目集成人员和系统维保人员提供些许补益。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-25 02:29:38
家庭影院技术(2021年3期)2021-05-21 02:15:00
铁道通信信号(2020年5期)2020-09-21 09:21:34
铁道通信信号(2020年2期)2020-09-21 08:59:10
铁道通信信号(2020年9期)2020-02-06 09:15:22
现代装饰(2019年9期)2019-10-12 08:47:00
铁道通信信号(2019年11期)2019-05-21 03:06:04
铁道通信信号(2016年10期)2016-06-01 12:10:51
铁道通信信号(2016年4期)2016-06-01 12:10:19
城市轨道交通研究(2015年11期)2015-02-27 11:02:50