基于OpenMP的旋翼气动噪声并行计算
2018-11-14 08:29任明霞杨爱明
复旦学报(自然科学版) 2018年5期
任明霞,杨爱明
(复旦大学 航空航天系,上海 200433)
相对于固定翼飞机,直升机因其独特的起降方式,在军用和民用领域得到了广泛的应用.但是直升机面临的一个重要问题就是噪声问题.在民用领域,该问题严重影响乘坐舒适性和地面环境;在军用领域,该问题严重影响直升机的隐身性能.旋翼噪声的精确数值预测方法作为低噪声旋翼优化设计的先导技术,无疑具有重要的工程应用价值.
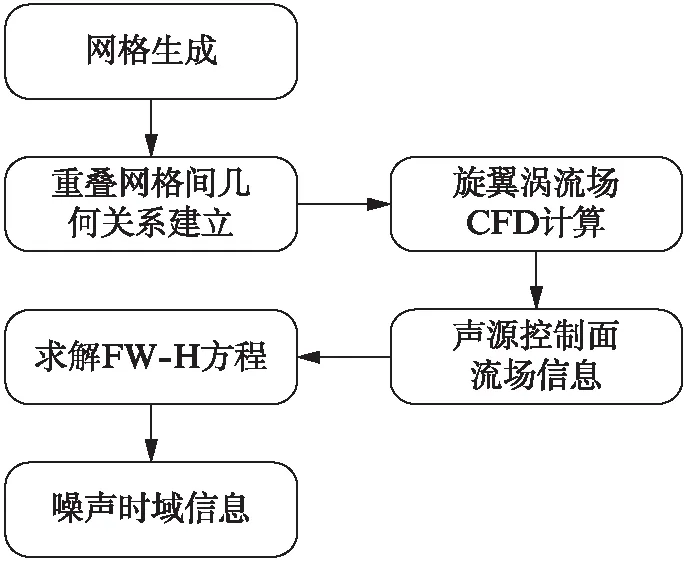
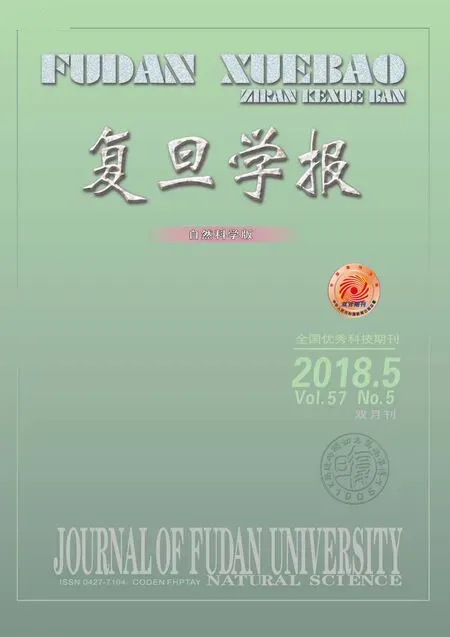
图1 旋翼噪声计算技术流程图Fig.1 Technology flowchart of rotor noise calculation
如果观测点距离直升机较近,直接利用计算流体动力学(Computational Fluid Dynamics, CFD)方法计算观测点处的噪声是可行的.但是对于远场噪声问题,观测点与直升机距离较远,直接应用CFD方法计算远场噪声问题是不现实的,其主要原因在于数值耗散和数值色散的影响.目前主流的噪声计算方法是一种将CFD与声比拟相结合的方法.在近场,通过数值方法求解Euler方程或Navier-Stokes(N-S)方程,得到声源控制面上的信息;在远场通过求解描述声波传播的波动方程得到远场的压力波动.Ffowcs Williams和Hawkings[1]于1969年在Lighthill声比拟研究的基础上,将N-S方程重新整理成非齐次波动方程的形式,得到了著名的FW-H方程.该方程可以描述运动物体产生的远场噪声问题,目前旋翼噪声的数值预测大多采用该方程.由于FW-H方程是一个微分方程,直接求解比较困难,NASA的科学家Farassat[2]提出了一种积分方法,得到了FW-H方程的两个求解公式,即F1和F1A.该积分方法甚至可以将声源面取为可穿透的控制面.本文对旋翼远场噪声的数值计算采用可穿透的控制面,通过F1A公式进行求解.
根据Farassat的积分公式求解FW-H方程,需要先得到直升机旋翼的流场信息,图1为旋翼噪声计算的技术路线示意图.在本文工作中,旋翼流场的数值计算采用格心格式的有限体积方法[3],时间推进采用双时间推进方法[4-5],子迭代由LU-SSOR方法[6]完成.旋翼涡流场的CFD计算中,由于隐式LU-SSOR方法在每个迭代过程中占据主要的计算时间,因此对LU-SSOR算法进行并行计算无疑可以提高旋翼涡流场的计算效率,大大缩减程序运行时间.
并行编程是使用程序语言显式地进行说明,从而实现将计算任务中不同部分分配给不同的CPU同时执行.目前,工程技术人员常用的编程语言是消息传递接口[7](Message Passing Interface, MPI)和直接控制共享内存式并行编程的应用程序接口[8](Open Multi-Processing, OpenMP).MPI需要明确划分数据结构并重构源程序,编程困难且开发周期长,而OpenMP主要针对循环进行并行,能有效克服并行编程的可移植性和扩散性能差的缺点.基于此,本文选用OpenMP进行源程序的并行优化,针对隐式LU-SSOR算法存在较强数据依赖性的问题,发展了两种并行策略.
1 数值方法
1.1 流场计算方法
在绝对坐标系下,积分形式的RANS方程为:
(1)
式中:W为守恒变量;Hc和Hv为对流通量和粘性通量.表达式如下:
(2)
(3)
式(2)和(3)中:ρ,(u,v,w),p,E,H,k,T和τ分别为流体密度,流体速度在3个坐标方向上的分量,压强,单位体积的总能,单位体积的总焓,热传导系数,温度和粘性应力;V和Vb分别为流体速度矢量和网格速度矢量.为了封闭方程,还需要引入如下的状态方程:
p=(γ-1)ρ[E-0.5(u2+v2+w2)].
(4)
在计算旋翼的悬停流场时,由于在旋转坐标系下观察流体的绝对运动,流动是定常的.因此将控制方程在旋转坐标系下表达无疑是方便的.引入如下公式:
(5)
式中:
B=Bxi+Byj+Bzk=Br=Bxrir+Byrjr+Bzrkr,
(6)
(7)
(i,j,k)和(ir,jr,kr)分别为绝对坐标系和旋转坐标系下的坐标轴方向单位矢量;ω为旋转坐标系相对于绝对坐标系的旋转角速度矢量.将式(5)应用于绝对坐标系下的控制方程(1)中的3个动量方程,则可以得到如下的旋转坐标系下的控制方程:
(8)
(9)
与绝对坐标系下的控制方程(1)相比,方程(8)中多了一项源项.方程(9)中各物理量的介绍在此省略.式(8)和(9)中,下标r代表旋转坐标系.值得指出的是,式(8)和(9)中所有矢量均为绝对矢量,仅对其分量在旋转坐标系下表达而已.
旋翼流场的数值计算采用格心格式的有限体积方法.对于任意控制体Vi,j,k,应用式(1)可得
(10)
(11)
式中:
(12)
1.2 时间推进
用二阶向后差分近似式(10)中的物理时间导数项可得
(13)
为了得到物理时间t上的时间精确解Wn+1,我们在式(13)中引入守恒变量对伪时间τ的导数项,则可以得到:
(14)
显然,伪时间方向上的定常收敛解即为物理时间上的时间精确解.为了方便起见,我们将待求变量Wn+1重新记为W*,则式(14)可改写为:
(15)
式(15)在伪时间方向上的时间推进格式采用隐式LU-SSOR方法.首先采用一阶向后差分近似伪时间导数项
(16)
然后将残值R进行线化处理(仅处理无粘部分),即:
(17)
将式(17)代入式(16),则可得到:
(18)
式中:A,B和C分别为3个方向上的Jacobian矩阵,即
交界面处的Jacobian矩阵按照如下的迎风格式处理:
(19)
其他方向依此类推.式(19)中A±的定义为:
式中:ρA为A的谱半径;σ为一个略大于1的常数;I为单位矩阵.上述定义可以保证A+的所有信息向正方向传播,而A-的所有信息向负方向传播.定义如下3个算子:
(20)
则式(18)可以写成如下的算子形式:
(L+D+U)ΔW*=RHS,
(21)
RHS由下式定义:
(22)
又因为
(L+D+U)ΔW*≈(L+D)D-1(U+D)ΔW*,
(23)
则我们可以得到如下的方程:
(L+D)D-1(U+D)ΔW*=RHS.
(24)
该方程的求解可以分为两步,即上扫和下扫过程:


更新 (W*)m+1=(W*)m+1+ΔW*.
值得指出的是,为了提高计算效率,一般将伪时间步长取为无穷大,则子迭代过程近似为高效的Newton迭代.
2 OpenMP并行计算
由以上推导过程可知,LU-SSOR方法存在很强的数据依赖性,因此不能利用一般的OpenMP并行语句进行并行处理.基于此,本文根据NAS并行基准[9]发展了超平面(Hyperplane)和管道流(Pipelining)两种并行策略.
2.1 超平面策略
由于隐式LU-SSOR存在很强的数据依赖性,因此不能简单地在I/J/K任意一个方向上做OpenMP并行计算.超平面算法的思想是构造平面M=I+J+K,计算沿着构造平面进行,然后将任务在J方向上分配给不同的线程,实现并行计算.
以二维情况为例,如图2,超平面方法将计算空间划分为一个个的平面,M=I+J,然后在J方向上进行并行计算.实心圆为流场信息已知的网格点,空心圆为待求解流场信息的网格点.以点(Ia,Ja)为例,在用双时间算法进行推进过程中,点(Ia,Ja)的流场值依赖于点(Ia-1,Ja)和点(Ia,Ja-1).超平面算法可以保证点(Ia-1,Ja)和点(Ia,Ja-1)的流场值先于点(Ia,Ja)更新,从而解决了数据依赖性问题.即对于任意一个超平面L,其上的网格点数值仅仅与上一个超平面(L-1)上的网格点有关,超平面内的网格点之间没有数据依赖性.
2.2 管道流策略
管道流方法的核心思想是在最外层方向上(比如K方向)建造一条管道,在该管道内,每个线程相当于一个流水线.然后将里层(比如J方向)的任务静态地分解成许多子任务,并分配给相应的线程.

图2 超平面算法示意图Fig.2 Hyperplane algorithm schematic

图3 管道流算法示意图Fig.3 Pipelining algorithm schematic
图3给出了拥有n条线程(T0,T1,T2,…,Tn-1)或称管道流线的管道流算法示意图.在K方向上建造管道,使每个线程都将K的取值遍历一遍.对于第N层(K=N),J方向上的任务被分成M份,并依次分配给n个不同的线程.因为存在数据依赖,任务队列中任务KNJM的执行需要在任务KN-1JM和KNJM-1之后.可通过恰当地设置标志数组实现相应的线程同步,从而解决数据依赖问题.
3 算 例
3.1 并行测试
为了验证发展的针对隐式LU-SSOR方法的两种并行策略,选取展弦比为13.71的UH-1H桨叶进行测试.桨叶网格的大小为149(弦向)×41(法向)×81(展向),背景网格的大小为241(周向)×81(纵向)×101(径向).计算在Intel(R)Xeon(R)CPU E5-2650 v3 @2.30GHZ服务器上进行,该服务器共有40个线程.
以一个扫描周期为例,利用超平面(Hyperplane)和管道流(Pipelining)两种方法对原有串行程序进行并行化处理,得到一个扫描周期内的耗时t(单位: s)随所用线程个数n(单位: 个)变化的关系图,如图4(见第592页).可以看出,当线程个数达到18时,并行加速比达到3.13,说明本文发展的两种并行策略使流场计算的效率得到大幅度提高,因此直升机旋翼噪声计算的周期大大缩减.
3.2 Caradonna-Tung旋翼有升力悬停

图4 超平面和管道流并行效果Fig.4 Parallel effects of hyperplane and pipelining
Caradonna-Tung旋翼[10]由两片桨叶组成,桨叶形状为矩形,展弦比为6,翼型为NACA0012,桨叶半径为1.143m,弦长19.05cm,翼型无扭转,无尖削.本算例的计算状态为: 桨尖马赫数为0.439,总距角为8°.
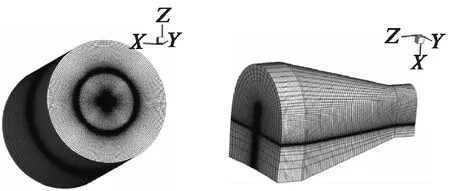
图5 背景网格(左)和桨叶网格(右)Fig.5 Background grid(left) and rotor mesh(right)
计算网格采用两块重叠网格,背景网格大小为221(周向)×121(纵向)×121(径向),桨叶网格大小为121(弦向)×81(法向)×81(展向),如图5所示.背景网格在周向均匀分布,在垂直方向于桨盘平面附近进行加密,径向在桨尖附近进行加密.旋翼桨叶网格的生成采用了双曲型网格生成方法[11],只需要给定初始表面网格分布即可自动生成体网格.为了提高重叠网格的计算效率,避免旋翼桨叶网格在计算过程中出现重叠,外边界的大小沿展向从小到大分布.
本算例并行计算共耗时12.5h,而串行计算耗时39.9h,计算速度提高了3.2倍.图6给出了计算得到的不同展向位置翼型压力系数(CP)分布与试验值的对比,计算结果与试验值吻合很好,说明了本文发展的并行计算方法的准确性.

图6 不同展向位置翼型压力系数分布Fig.6 Distribution of pressure coefficients at different span positions
对该算例进行网格无关性分析,选取不同的网格数量级进行计算,如表1.图7给出了不同网格数量级计算得到的悬停拉力系数与NASA理论计算数值的对比,横坐标为网格数量n(万),纵坐标为拉力系数CT.由图7可知,该算例当旋翼网格数量达到60万,背景网格数量达到200万时,计算收敛.

图7 悬停拉力系数与理论值对比Fig.7 Comparison of hover thrust coefficient with theoretical value

表1 旋翼网格和背景网格分布
注: 括号内的数值为网格的数量.
3.3 AH-1/OLS有升力前飞
AH-1/OLS模型旋翼[12-13]由两片桨叶组成,桨叶平面形状为矩形,桨叶带8.2°的线性负扭转,展弦比为9.22,静止状态下,在距离旋转中心75%展长处扭转角为0°,翼型为OLS翼型[14-15].桨叶在前飞过程中不仅有旋转运动,还包括挥舞、变距、摆振等运动.若定义旋翼桨叶的方位角为Ψ,变距角为θ,挥舞角为β,摆振角为δ,则桨叶的运动规律为:
ψ=ψ0+ωt,
β=β0+βlccos(ψ)+βlssin(ψ),
θ=θ0+θlccos(ψ)+θlssin(ψ),
δ=δ0+δlccos(ψ)+δlssin(ψ).
对AH-1/OLS旋翼的10014工况进行远场距离相关性分析,对应的计算状态为:
Mtip=0.664,μ=0.164,αTPP=1°,Re=1.6×106,CT=0.0054.
变距和挥舞运动规律如下:
θ(t)=6.14°+0.9°cos(ψ)-1.39°sin(ψ),
β(t)=0.5°+1.0°cos(ψ).
计算所用背景网格为圆柱形网格,在计算过程中也随桨叶做旋转运动.本文选取不同的远场距离进行了计算比较,如图8所示,r表示背景网格的半径,d表示背景网格的纵向长度.表2给出了4种计算状态和不同远场距离的拉力系数与试验值的误差,其中R为旋翼桨盘半径.由表可知随着远场距离的增大,计算收敛.
图8 远场边界示意图Fig.8 Far-field boundary schematic

表2 远场距离选择(a)和拉力系数的计算值与误差(b)
为了将数值计算的噪声与试验值作对比,选取该旋翼有噪声试验数据的3017工况进行噪声计算.3017工况的计算状态为:Mtip=0.663,μ=0.162,αTPP=1°,Re=1.6×106.变距运动规律为:
θ(t)=5.03°+1.98°cos(ψ)-2.04°sin(ψ).
选取旋翼控制面计算噪声.图9(见第594页)给出了旋翼控制面上的压强分布.图10(见第594页)给出了计算得到的噪声与试验值的对比,横坐标为方位角ψ,纵坐标为压力脉动p′,单位为Pa.计算结果与实验值吻合较好,说明本文发展的旋翼气动噪声数值预测方法的可靠性.在该工况下,串行计算耗时112.94h,并行计算耗时37.8h,计算速度提高了2.99倍.

图9 旋翼控制面上的压强分布示意图Fig.9 Diagram of pressure distribution on rotor control surface
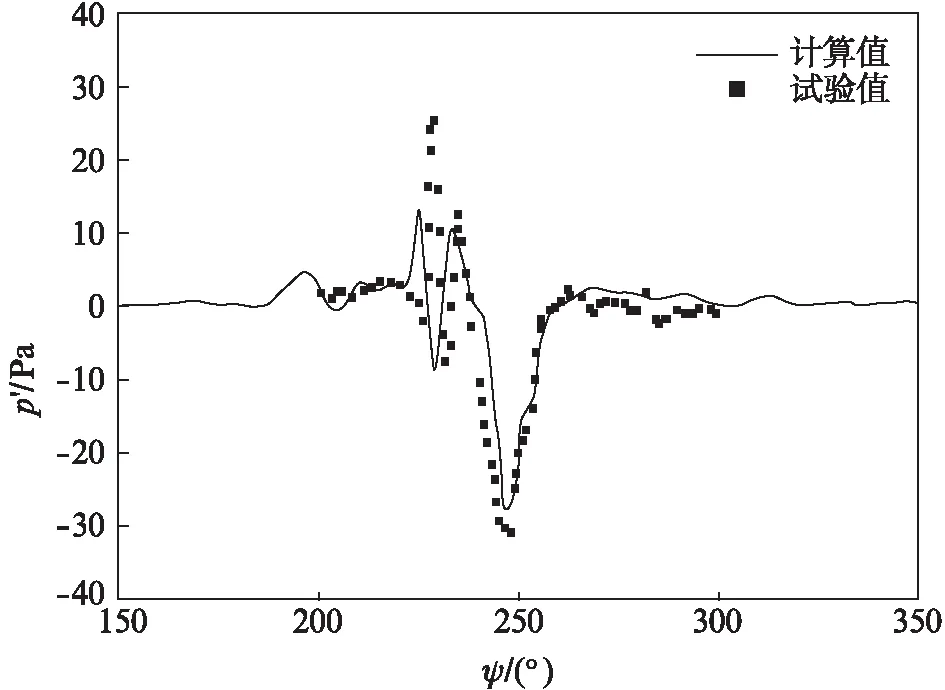
图10 计算噪声与试验值对比Fig.10 Comparison of calculated noise with test data
4 结 语
本文基于CFD/FW-H方法对旋翼的气动噪声进行了数值预测并基于OpenMP对源程序进行了并行优化.针对隐式LU-SSOR算法存在数据依赖性难以实现并行的问题,发展了超平面(Hyperplane)和管道流(Pipelining)两种并行策略,实现了LU-SSOR算法的OpenMP并行计算.算例显示,当并行计算的线程达到18时,两种并行策略使得旋翼涡流场的计算速度提高3倍以上.因此,旋翼噪声的计算周期大大缩短,说明本文发展的两种并行策略具有重要的工程应用价值.
猜你喜欢
数学年刊A辑(中文版)(2021年3期)2021-11-05
数学年刊A辑(中文版)(2021年2期)2021-07-17
液晶与显示(2019年5期)2019-06-11
数学物理学报(2019年1期)2019-03-21
固体火箭技术(2018年6期)2019-01-18
测控技术(2018年2期)2018-12-09
测控技术(2018年9期)2018-11-25
重庆工商大学学报(自然科学版)(2018年3期)2018-05-11
火控雷达技术(2016年2期)2016-02-06
振动工程学报(2015年2期)2015-03-01