一种新型空间抓捕机构抓捕弱撞击分析
2018-11-13 05:55:16武国梁解志坚李永振高碧祥
火力与指挥控制 2018年10期
武国梁,解志坚,李永振,高碧祥
(1.中北大学机电工程学院,太原 030051;2.北京航空航天大学,北京 100191;3.四川航天电子设备研究所,成都 610100)
0 引言
在轨的抓捕技术是指卫星本体航天器对目标卫星航天器的抓捕技术。在轨抓捕的关健是对目标卫星实现刚性连接,由于目标卫星既可能是合作目标卫星,也可能是非合作目标卫星,还可能是失效卫星。所以,如何抓捕目标卫星是现今世界各国在航天领域的研究热点,各国均在积极研制用于在轨卫星抓捕的无人航天器[1-2]。本文介绍的抓捕机构可满足对目标卫星的抓捕和释放,该机构不仅能满足卫星的特殊要求,而且,具有良好的机械性能(结构成熟,运动平稳,对目标卫星撞击力小,抓捕牢靠,可抓捕可释放)本文主要针对目标卫星静止时服务卫星对其抓捕的抓捕机构的设计的研究分析,同时对该抓捕机构的导向机构中有无弹簧阻尼对目标卫星发动机喷管的撞击力进行了分析[3-6]。
1 服务卫星抓捕机构的
1.1 工作原理
利用安装在服务卫星上的一个可伸缩机构带动抓捕锁紧机构,实现对目标卫星的抓捕。当服务卫星的运动满足抓捕的条件时,伸缩机构以一定的速度开始带动抓捕机构缓慢伸出,抓捕机构接触目标卫星发动机喷管时,为防止因撞击力过大使得抓捕的目标卫星逃离,在抓捕机构前端设计有导向阻尼机构,从而吸收部分撞击力产生的能量、减小抓捕时的撞击力,(本论文着重研究阻尼机构对抓捕目标卫星的影响。)服务卫星和目标卫星的整体结构图如图1所示,加工原理样机如图2所示,抓捕机构如图3所示,服务卫星的抓捕工作流程如图4所示。
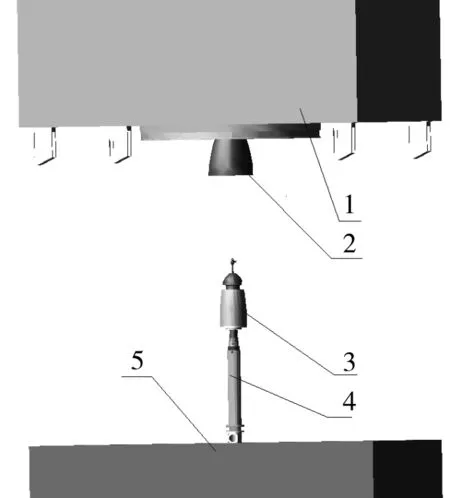
图1 服务卫星和目标卫星整体结构
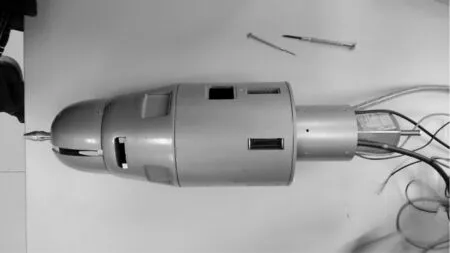
图2 抓捕机构的原理样机
1.2 导向阻尼结构的设计
当抓捕机构在伸缩机构的带动下,缓慢进入目标卫星喷管内部时,抓捕机构会与目标卫星喷管发生撞击,为防止撞击对抓捕机构中的其他器件的损坏,减小撞击时产生的撞击力,设计了带阻尼的导向机构[7-9];并且,为使抓捕机构顺利进入目标卫星发动机喷管内,又需要设计导向机构中的导向瓣外表与目标卫星的喷管内壁表面相啮合,使得抓捕机构顺利进入目标卫星星喷管内。为此设计了可以导向又能减小撞击力的导向阻尼机构,其结构如图5所示[3]。
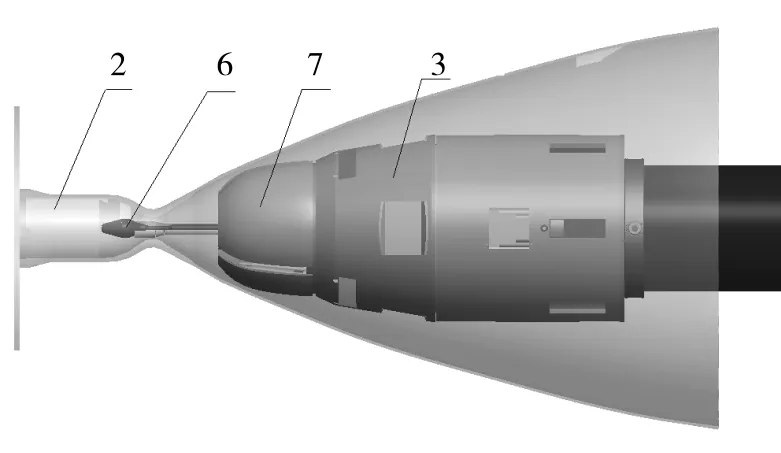
图3 服务卫星抓捕机构

图4 服务卫星工作流程
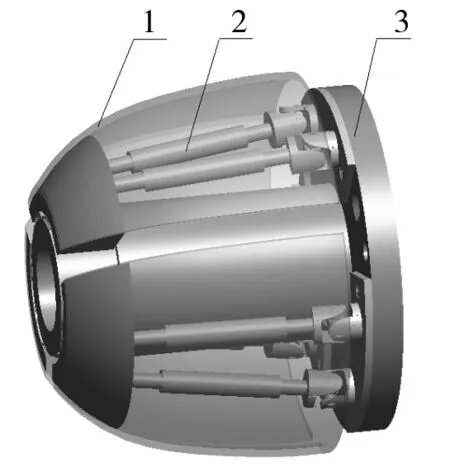
图5 导向阻尼机构结构图

图6 导向瓣受力图
导向阻尼机构主要由导向瓣、阻尼杆和支架座等组成。由于目标卫星喷管的形状近似漏斗形,因而该机构整体设计也呈漏斗,其由三瓣机构组成,每一瓣都有两组阻尼杆支撑结构,使每个导向瓣均有4个自由度。当与目标卫星的喷管接触时,会产生沿导向阻尼机构的法向碰撞力FN,该力可以分解成沿抓捕机构轴向力Fz和沿径向的力Fr(如图6所示)。并且,两个方向的分力均使导向瓣带动阻尼杆中的弹簧作运动,进而将撞击力吸收,转化成阻尼机构的内能,实现减小撞击力的目的。
2 阻尼机构的建模分析
导向机构撞击目标卫星的发动机喷管可以等效成一个弹簧阻尼,继而,可以在ADAMS里设置加载弹簧的参数弹簧阻尼参数[10-14]。等效阻尼法将碰撞过程中碰撞现象处理为连续动力学,将导向机构撞击目标卫星的发动机喷管的接触力等效成一个弹簧阻尼模型如图7所示。假设两个物体的接触点的曲率半径分别为R1和R2,接触面的法线方向设为n。考虑到材料的阻尼,采用广义的Hertz公式接触力具有如下形式[4]:

式(1)弹性力学中的Hertz刚度k,取决于材料特性和曲率半径R1,R2,具体如下式:
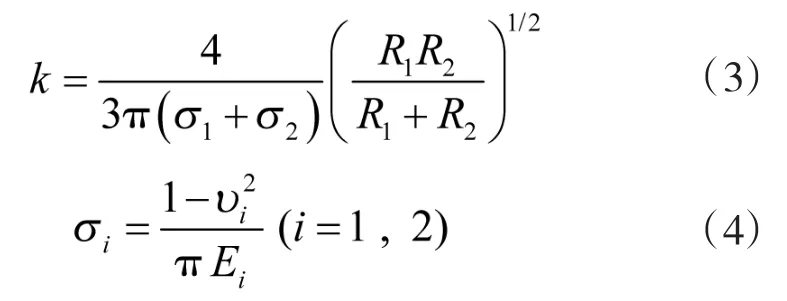
式中,R1为物体1的接触面曲率半径;R2为物体2的接触面曲率半径;σi为接触面间的接触应力;Ei为弹性模量;υi为泊松比;
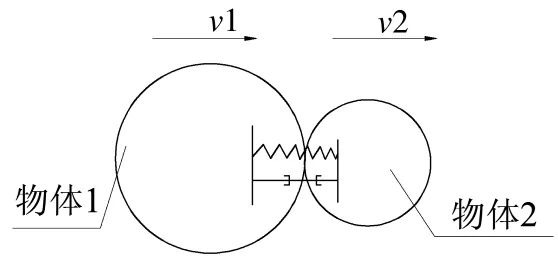
图7 弹簧阻尼模型
3 ADAMS动力学仿真
动力学仿真的初始条件:
1)服务卫星质量2 200 kg;
2)目标卫星质量1 600 kg;
3)服务卫星与目标卫星的相对位置容差:X方向70 mm,Y方向70 mm;
4)角度容差:X 方向 1°,Y 方向 1°,Z 方向 1°;
5)目标卫星与服务卫星相对静止;
6)目标卫星与服务卫星无重力环境下。
3.1 模型简化与假设
影响空间卫星抓捕的的因素很多,为了简化对接抓捕的过程,需要作如下假设:
1)ADAMS动力学模型按照实际的运动添加约束和接触力,其模型不考虑各种误差;
2)所有机构均按刚体处理。
3.2 建立动力学模型
利用UG建模软件对不影响正常运动情况下对服务卫星的抓捕机构进行简化并导入ADAMS中,根据各机构在实际工作环境中,添加抓捕机构的材料属性和约束;并设置变量参数,最后完成动力学仿真的建立,如图8所示,导向瓣的模型参数如表1所示。

图8 动力学仿真模型
3.3 模型参数设置
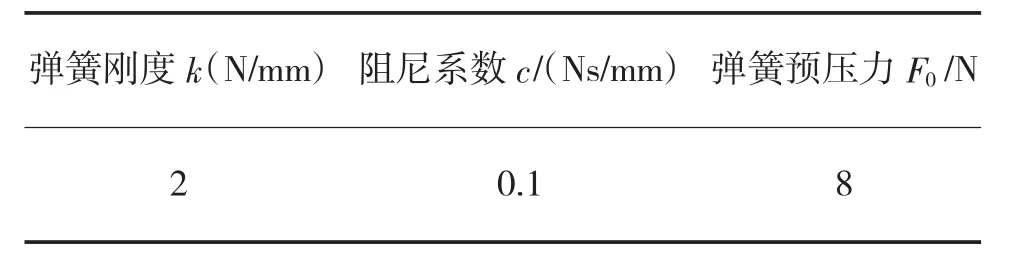
表1 设置仿真模型的基本参数
3.4 仿真分析
工作在空间的卫星即使受到很小的力,也会产生很大的转动位移。因此,服务卫星抓捕机构对目标卫星发动机喷管撞击力为研究的关键。本文在不同的速度下,导向机构有无阻尼情况分别测得接触力如表2所示。
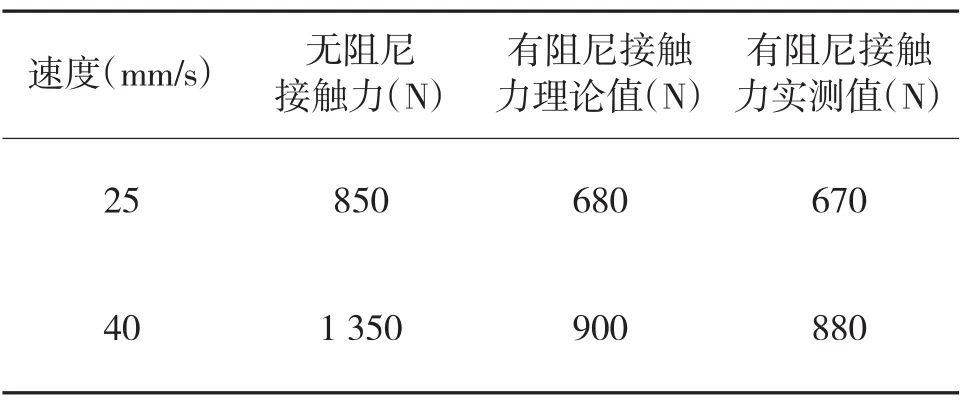
表2 导向机构在不同速度下有无阻尼的接触力
由表2可知该抓捕机构在25 mm/s和在40 mm/s运动速度时,导向瓣有阻尼器比无阻尼器导向机构的撞击力可以减少15%左右。
导向瓣在有阻尼器和无阻尼器的情况下,导向瓣撞击目标卫星发动机喷管的接触力如下页图9和图10所示。
通过上述两种速度下有无阻尼器的情况对比分析可以看出,安装上阻尼器能够有效降低导向瓣与喷管间的接触力,接触力大约减小15%。
通过仿真分析可知有阻尼比无阻尼抓捕机构撞击目标卫星后,目标卫星在空间的上下左右各个方向的位移量有所减小(大约15%),尤其在上下方位的位移量降低比较明显,如图11和图12所示。

图9 V伸缩=25 mm/s时导向瓣与喷管的接触力
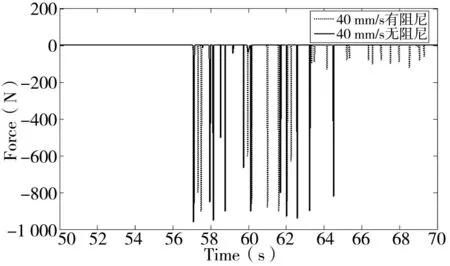
图10 V伸缩=40 mm/s时导向瓣与喷管的接触力

图11 目标卫星在有阻尼与无阻尼两种情况上下方位的位移

图12 目标卫星在有阻尼与无阻尼两种情况左右方位的位移
4 测试结果
1)试验条件
①试验环境为有重力和空气的实际环境;
②服务卫星沿着轨道直线运动,目标卫星悬挂在架座上;
③抓捕器安装在服务卫星前端。
2)试验过程
由于空间环境都是无重力的,但是,此试验只是模拟阶段,因此,试验的环境是在有重力的情况下,对抓捕头中的导向机构在有阻尼的机构对目标卫星抓捕进行试验,试验结果与仿真结果较为相符,试验过程如图13所示和试验结果如表3所示。

图13 样机抓捕试验图
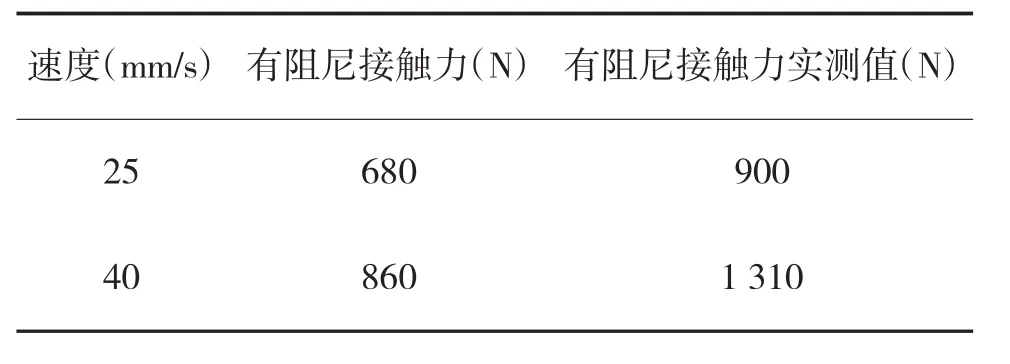
表3 导向机构在不同速度下有理论与实测值阻尼的接触力
5 结论
1)为了完成特殊抓捕结构的CEO卫星的在轨服务要求,在参阅大量国内外的空间抓捕机构的基础上,设计了一种新型卫星抓捕机构;
2)由表2可知撞击力减小15%左右;
3)由图11和图12可知有阻尼的抓捕机构比无阻尼的抓捕机构撞击目标卫星后,目标卫星偏转位移减小约15%;
4)导向机构在25 mm/s和40 mm/s速度下有阻尼的接触力理论值与实测值的误差为1.5%和2.2%误差较小满足设计要求。
5)该服务卫星的抓捕机构中导向阻尼机构为在轨服务提供新的结构设计。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:33:54
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
数学物理学报(2021年2期)2021-06-09 08:54:38
工业安全与环保(2020年10期)2020-11-05 05:51:04
重庆交通大学学报(自然科学版)(2018年9期)2018-09-20 04:43:50
四川建筑(2018年4期)2018-09-14 00:16:52
数学物理学报(2016年6期)2016-04-16 04:41:06
湖南理工学院学报(自然科学版)(2015年4期)2015-06-01 10:57:12
噪声与振动控制(2015年4期)2015-01-01 07:08:24