某型高炮火控系统并行通信信号检测模块设计
2018-11-13 05:55:18李玉琳郝巨东刘开源孙伟龙
火力与指挥控制 2018年10期
李玉琳,郝巨东,姜 满,刘开源,孙伟龙
(北方自动控制技术研究所,太原 030006)
0 引言
我军某型自行高炮武器系统是我军机械化、摩托化步兵师(团)、装甲师(旅)伴随防空的主要装备。目前,相当一部分该型毫米自行高炮已经到了或接近中修期,故障率普遍较高。然而,由于部队缺乏必要的检测诊断设备,导致不能及时掌握装备的实际技术状态,使很多故障不能及时发现。其后果是导致故障范围扩大,影响训练效果或使训练不能正常进行。另外,对于故障装备,部队通常采用组合(单体)代换法来定位和修复,由于代换单体通常只能凭经验进行,这一方面容易损坏正常组合(单体),另一方面使得整个连套炮车的故障单体都集中到了一门炮车上,每个连套至少有一门炮车长期处于故障甚至瘫痪状态,严重影响了整体战斗力。因此,考虑到战时应急保障的实际需要,部队随时随地能够检查、掌握本身装备的技术状况,加强部队自身装备保障能力建设已是迫在眉睫[1]。
通过配备的专用检测计算机能够实现对炮车火控系统的数据采集,达到总体性能测试的目的。然而,从本质上看,它仅仅是利用计算机并行通信功能将火控系统工作中的某些参数传递出来,计算一些基本的误差,绘制一些曲线供技术人员参考。它是以设计人员的身份、从系统调试的角度来实现的。因此,对于部队维修保障而言使用起来太过复杂[2]。
因此,本文设计并实现了一种针对该火控系统中的并行通信信号在线检测模块,通过对火控系统中主要节点并行通信信号的在线检测,实现对火控系统的功能和性能监测,方便部队维修保障,为进一步的性能测试和故障诊断打下基础。
1 火控系统结构及监测点选择
该型自行高炮结构复杂、技术密集,主要可以分为通用底盘系统、火力系统、光电火控系统、雷达系统和通信导航系统等。其中,通用底盘系统、火力系统以机械部分为主,本身也有很大的通用性,所以不在研究范围之内。雷达系统虽然自身比较复杂,但是技术上和结构上的通用性也很强,并且与火控系统之间、与通信系统之间的连接关系比较单一,因此,只将雷达系统与其他分系统之间的接口部分纳入研究范围。而光电火控系统则是全新的,作为第一代自行式防空武器系统,其通信导航系统等也与以前大不相同,再加上全炮电气控制系统等,这些分系统涉及单体多达30余个,信号耦合程度较深,是真正测试和故障诊断的难点,其光电火控系统原理如图1所示。
鉴于火控系统的复杂性,不可能对每一个单体及其接口进行监测。因此,在具体实施时,应该选择那些关键的、承上启下的、能反应单体级以上工作状态的节点进行监测。根据该火控系统采用多计算机分布式的技术特点,以系统中的专用计算机为主要监测对象,通过它们之间的数据传输监测获取所需的信息,在此基础上依据系统工作原理和这些节点之间的数值上的关联关系,来判定某一分系统或者单体的实时工作情况[3]。图2给出了选择的主要监测点的分布情况。
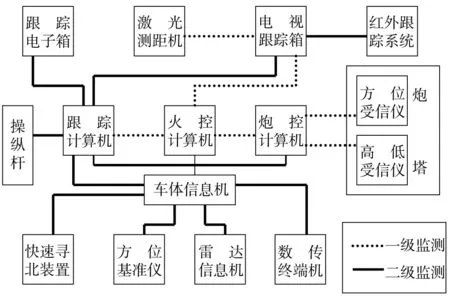
图2 主要监测点分布图
由于单体之间的并行通信一般需要10路通道以上,数据传送时还必须在相应时钟控制下进行,所以对并行通信信号的测试至少需要11路,如果是双向通信则需要20多路。考虑到多点测试的必要性,所需路数还将成倍增加。一般而言,单路双向测试可满足大多数情况,此时需要至少22路。多点测试则通过时分方式进行复用。通过对选取的系统中主要监测点接口信号的分析可知,主要单体之间的接口信号均为并行通信信号,如下页表1所示。
状态监测的主要内容是对稳定跟踪系统、火控计算机系统和火炮随动系统等主要子系统的工作状态进行监控;对火控计算机、稳定跟踪计算机、车体信息处理主机、随动控制箱、激光测距机、电视跟踪器等主要单体通信信号进行监控和测试[4]。
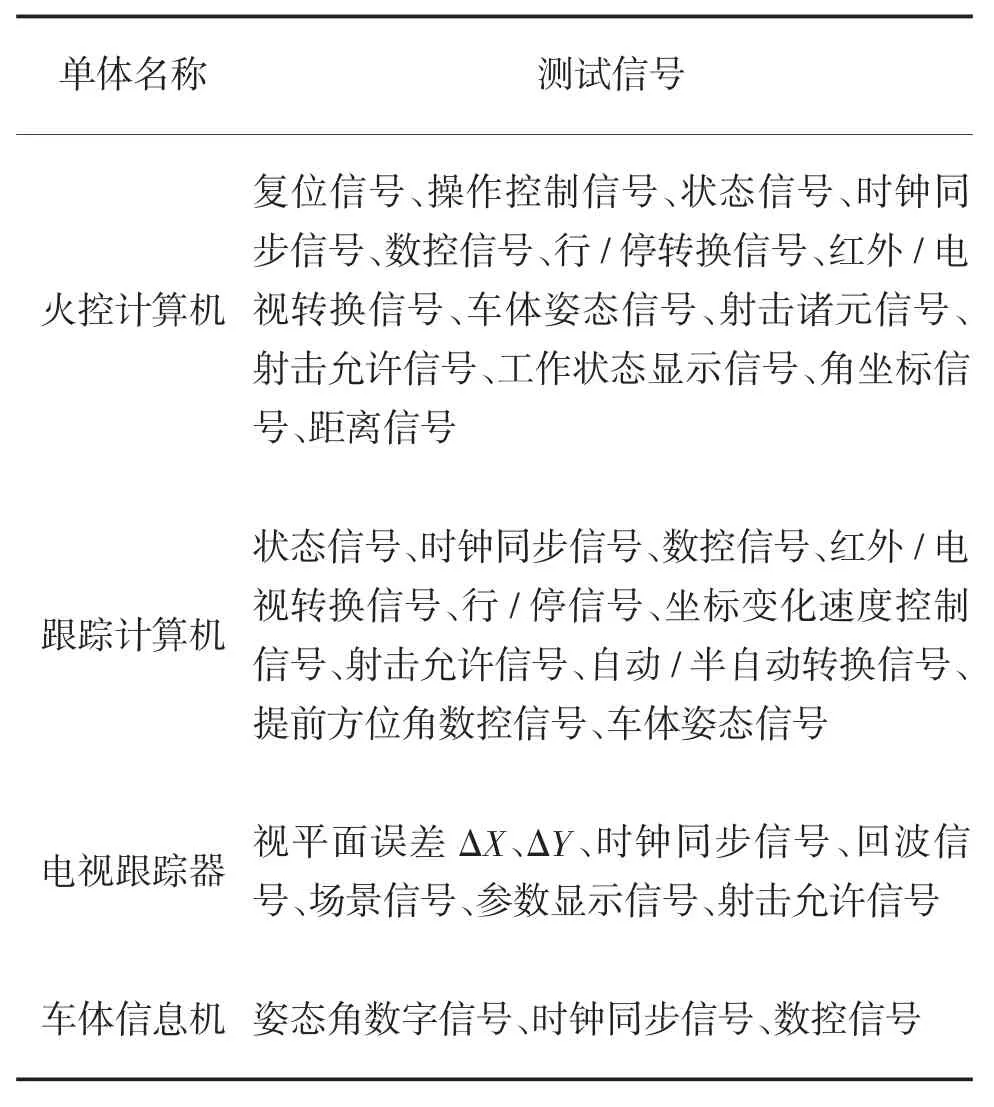
表1 部分主要单体待测信号表
2 监测系统及信号测试接口设计
2.1 系统结构及工作模式
整个状态监测系统采用分布式结构,包括一个主监测模块和若干个单体监测模块,单体监测模块可根据需要增减。各个单体监测模块硬件和软件完全相同,都能完成数据采集与处理、报警、状态显示等功能,不同的是由于各单体的信号在信号特征数据库中的特征信息不同,所以由软件根据数据库采用不同的采集方法。各单体监测模块安装在自行高炮上,无间隙监测自行高炮火控系统各单体。主监测模块为一台装有监测软件的笔记本电脑,以串口方式与各单体监测模块连接。单体监测模块可独立采集数据并进行简单的处理,发出故障报警,所有单体监测模块各自构成小型监测系统。单体监测模块也可在主监测模块的调度下进行数据采集并将数据上传给主监测模块,这时单体监测模块变成了整个大监测系统的一部分,相当于整个监测系统的数据采集模块。单体监测模块在主监测模块调度下工作时,主监测模块所调度的单体监测模块的数量可由主监测模块根据需要决定,未被调度的单体监测模块仍自行工作[5]。监控系统的基本结构如图3所示。
其工作模式可以分为以下3种:
2.1.1 监测模块单独工作
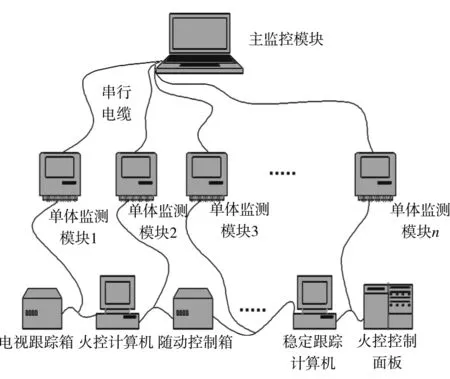
图3 监测系统的结构
监测模块可连接于需要监测的部位,无论静止还是运动状态,都进行实时连续监测。一旦发现异常,即发出报警信息,并给出详细的出错信息。在单独工作时,应同时上报各种信息,只不过此时中心服务器(主监测模块)不工作。这种情况适合平时作战、训练时使用。
2.2.2 静止状态下全系统监测
炮车处于静止状态时,对火控系统的工作状态进行全面监测,采用多点同时监测的手段实施,能对火控系统工作过程中的各个环节进行详细监测和分析。弹炮结合武器系统静止状态下进行的各种静态和动态监测,适用于日常操作训练、装备技术状态检查、故障检测与诊断等。
2.2.3 运动状态下的全系统监测
在炮车行进过程中,主要限于关键部位状态监测,主要包括目标跟踪状态监测、火控计算机诸元解算过程监测、随动系统工作状态监测、导航系统工作状态监测等。此时监测的主要目的是反映装备的整体工作状况,及时发现异常或故障。采用分布式、小型监测装置进行,提供状态显示和报警功能。
2.2 测试接口设计
对于系统级和分系统级测试而言,主要分为性能测试和故障隔离测试。性能测试的目的是对整个火控系统的静态性能和动态性能进行测试,是基于系统完好、工作正常条件下的测试,因此,测试点不需要太多,只要能满足需要即可。但是这些测试点必须同时进行采集,以保证数据的同时性。这里选择了电视跟踪目标数据、激光测距数据、火控解算数据、随动控制信息、炮塔位置反馈信息。故障隔离测试时需要测试的数据更多,但是不一定非要同时测试,可以一次测试几个节点,具体视故障诊断的需要而定。
采用“信号分组,数据优先”的原则进行设计。对于实时性要求高的、需要同时采集的数据(目标现在点、解算诸元、激光距离等)分作一组,利用触发方式优先采集。为了减小高速采集时的数据量,配合火控系统固有的数据传输时序控制采集时长,并根据采集对象的不同选择相应的触发信号和基准信号。对于其余的状态信号等分为第2组,利用上述采集的间隙通过连续采集方式进行采集。这些信号大多用来进行装备工作状态、信号是否正常等的判断(从而便于进行单体间故障隔离)[6]。
此外,为了保持数字采集板的工作稳定性,所有时序控制逻辑需要的信号均由外部产生,避免自身相互控制可能出现的竞争冲突。

图4 并行信号多点同时测试原理框图
图4是对跟踪计算机输出的目标现在点、激光测距机输出的目标距离、火控解算输出的射击诸元和随动高低、方位受信仪输出的模拟驱动信号进行同时采集的原理框图[7]。在需要对其他节点同时采集时,原理相同,只需对FPGA矩阵开关等重新配置即可。
3 测试模块的应用
通过并行通行信号在线测试模块可以实现火控系统的监测点的连续数据采集与分析,在此基础上就可以进行系统的性能测试和技术状态分析。
以火控计算机动态性能测试为例。
模拟条件下的动态性能检测分为以下几步:
1)将测试模块与各主要单体对应连接,如图5所示。
2)炮车上,将火控控制面板上的“工作状态”开关置于“动态”位置,“工作方式”开关置于“主方式”位置,“战斗方式”开关置于“停止”位置,“火控机模拟/全系统模拟”开关置于“全系统模拟”位置,“电视/红外”开关置于“红外”位置,接通目标模拟装置的电源以及相应开关,启动火炮随动系统。
3)火控计算机内装置有6条典型航路和1条实际航路,在完成上述准备工作后,火控控制面板上的“航路选择”开关依次转至1~7位置,即与上述航路相对,一般只检查6条典型航路中的几条就可以了。
4)在炮车上,按下键盘显示器上的“复位”键,电视显示器上的模拟目标按照所选航路运动,炮手即可截获半自动跟踪目标,然后左脚踏下“半自动-自动”转换踏板转为自动跟踪目标,电视跟踪现在点,火炮对准提前点,直到目标过航后,一个航路结束。
5)测试模块与炮车协同操作,在动态模拟航路开始运行时,测试模块采集数据、记录、数据处理。在一个模拟航路结束后读取动态解题值,并与动态解题标准值相比较。
6)如果需要录取跟踪图像,可启动录像机和电视机。
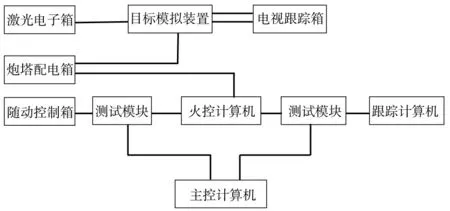
图5 动态模拟精度测试连接图
利用目标模拟装置模拟目标航路数据,使火控系统工作在全系统模拟条件下。将事先设计好的标准航路数据,按照实装接口信号格式和时序连续地灌入实装中[8-11]。同时,利用设计好的并行通信信号在线测试模块实时测试火控计算机的输出射击诸元信号。测试完毕后,将采集得到的连续射击诸元数据与标准值进行对比分析,即可得出火控计算机的动态解算性能。
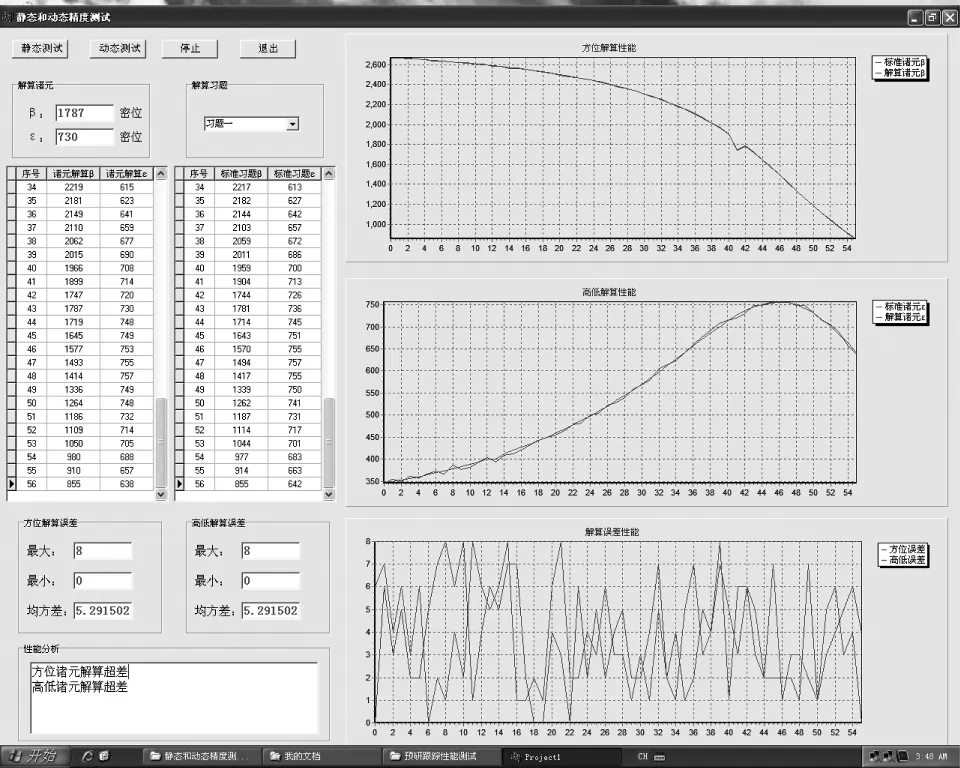
图6 火控计算机动态性能测试结果分析图
测试结果如图6所示,图6给出了测试数据与标准数据的对比曲线,并给出了各自的误差情况,总的分析结果表明火控计算机的动态解题精度达到了系统的精度要求。图6中,方位与高低解算与标准诸元基本吻合,体现了较高的解算精度。但是在高低诸元的解算之初,仍存在波动的状态曲线,说明初始测量阶段解算精度存在一定误差。方位解算均方差与高低解算均方差为5.291,满足测量误差需求。
4 结论
本文以我军现役某型自行高炮火控系统为对象,从装备状态监测的实际需求出发,设计了并行通信信号采集模块,实现了对多个节点信号的同时测试。主要内容包括:1)课题研究背景及该型自行高炮火控系统分析;2)该型自行高炮火控系统监测系统的总体设计;3)并行信号的采集及分析。从一定程度上解决了该型自行高炮火控系统的精确监测难题,具有一定的军事应用价值。
猜你喜欢
装备制造技术(2020年9期)2021-01-26 00:14:34
中国军转民(2017年7期)2017-12-19 13:30:00
科技创新导报(2016年28期)2017-03-14 11:13:30
卷宗(2016年10期)2017-01-21 15:36:37
大连工业大学学报(2015年4期)2015-12-11 04:06:50
海军航空大学学报(2015年3期)2015-11-11 17:18:49
中学历史教学(2015年11期)2015-11-11 07:09:09
中国民航大学学报(2015年3期)2015-03-01 01:57:13
中国卫生(2014年10期)2014-11-12 13:10:24
机电产品开发与创新(2014年4期)2014-03-11 16:42:18