虚拟装备操作训练的综合评价模型研究与应用*
2018-11-13 05:55:06蔡启航王世强
火力与指挥控制 2018年10期
蔡启航,王 洁,罗 畅,史 通,王世强
(空军工程大学防空反导学院,西安 710051)
0 引言
随着虚拟现实技术的飞速发展,虚拟现实系统在军事领域得到了广泛的应用,大大提高了部队的作战能力和指挥效能[1]。同时,以虚拟现实技术为基础的虚拟训练为武器装备的人员培训提供了一种新的训练方式。为此,许多专家学者对武器装备虚拟训练进行了深入的研究,并搭建了一系列的训练平台[2]。评价系统是虚拟训练系统的关键组成部分,能对训练人员的操作能力进行客观公正的评价。因此,构建科学客观的评价模型对于虚拟训练操作系统至关重要。
目前用于综合评价的方法比较多,在许多领域得到了广泛应用。在虚拟评价中常用的方法有层次分析法(Analytic Hierarchy Process,AHP)、模糊综合评判、神经网络法、专家知识库等[3]。国内外学者对虚拟综合评价进行了广泛研究,主要在于对现有方法的改进和发展,以及对多种评价方法的综合应用。矫永康等[4]对传统层次分析法和模糊综合评判法进行改进,避免了人为调整判断矩阵的盲目性,实现了无人机虚拟维修训练综合评价。刘春龙等[5]结合层次分析法、熵权法、德尔菲法、加权平均原则等方法,降低了评价中的主观性和片面性,实现了对虚拟消防演练的综合评价。以上这些方法仍存在着不足,一方面表现在指标权重直接或间接由专家给出,受专家主观因素影响太大[6],另一方面是没有考虑指标的模糊性和随机性对评价结果的影响[7]。
针对上述方法的不足之处,本文提出了层次分析法和熵权法相结合求取各级指标权重,从而减少了主观因素对各评价指标权重分配的影响。通过引入云模型理论,对各评价指标建立云模型来代替隶属函数,降低了评价的随机性和模糊性对结果的影响。最终再结合模糊综合评判形成了基于熵-AHP的云模糊综合评价模型。
1 构建综合评价体系
武器装备设备复杂、造价昂贵,任何错误操作都可能造成严重损失,因此,在虚拟训练过程中需对其操作过程进行严格控制和规范。武器装备的战备训练有专门的操作教令,教令中对装备战勤操作训练的标准操作流程[8]进行了详细的规定,操作人员只需按照此流程反复学习训练,就能熟练掌握装备正确的使用方法,并发挥装备的最佳使用效能。
根据操作教令中的标准操作流程可将虚拟装备操作训练中的全部操作步骤分解为4类独立的操作步骤:装备操作、人员跑位、口令和装备状态监视。充分考虑桌面式虚拟训练系统的特点,对4类操作步骤进行分析,确定了3种评价指标:操作耗时、有效观察时间和操作错误数。对装备操作类步骤指定一个操作耗时指标和操作错误数指标,对人员跑位类步骤指定一个操作耗时指标,口令类步骤指定一个操作错误数指标,对装备状态监视类步骤指定一个有效观察时间指标。虚拟装备操作训练评价指标体系如图1所示。
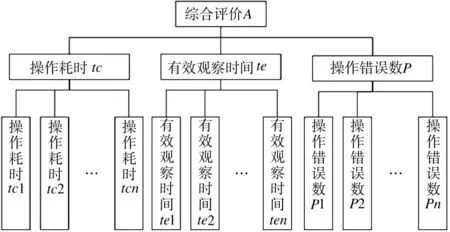
图1 虚拟装备操作训练综合评价指标体系
2 确定评价指标权重
权重是描述各评价指标重要程度的参数,对综合评价结果有重要影响。确定权重的常用方法有AHP、德尔菲法、统计法、熵权法。AHP是一种定性定量相结合的系统分析方法,传统AHP在确定指标权重时,必须进行一致性检验,若不满足一致性检验,需要人为调整判断矩阵,直至满足一致性检验。同时,AHP判断矩阵由专家根据经验知识直接给出,专家的主观因素对权重结果影响很大。针对以上问题,通过对AHP的改进,消除人为调整判断矩阵的盲目性,同时引入熵权法,利用各指标信息的差异程度来修正指标权重,减少主观因素的影响。
2.1 改进层次分析法
根据评价指标体系,对属于同一层次上的不同指标关于上层中的某一准则的重要程度进行两两比较,用Satty标度来衡量同一层次上的指标直接的倍数关系aij,得到由aij构成的判断矩阵A。矩阵A是由专家凭借经验确定的,因此,该矩阵不一定满足一致性检验,必须对其进行一致性检验。通过引入拟优传递矩阵对层次分析法进行改进,则无需进行一致性检验,也避免了人为调整判断矩阵。
则有

所以B满足bij=-bji,B是反对称矩阵。若B是反对称矩阵同时又为传递矩阵,则bij=bik-bjk,由式(2)得:

则A为一致性矩阵。为了满足A的一致性,可通过B的最优传递矩阵C来实现A的拟优传递[9]。最优传递矩阵C满足:

设矩阵A*为A的拟优传递矩阵,有

矩阵A*一定是一致性矩阵,一定满足一致性检验。求取矩阵A*最大特征值所对应的特征向量ω,经归一化处理后就可以得到各层次指标的初始权重向量。
2.2 修正指标权重
熵权法依据指标所蕴含信息量的不同而分配权重,引入熵权法旨在修正指标的初始权重。设有m个评价指标序列,n个评价指标,xij为第i个评价指标序列下对应第j个指标的数值。则评价矩阵X为:

对矩阵X进行标准化得到标准矩阵Y为:
同一指标下,某评价值相对指标序列和的比重为:

第j项指标的信息熵ej为:
对于第j项指标,指标值的差异越大,蕴含的信息越多,指标的效用和对评价的结果影响越大。因此,定义差异系数g,则第j个指标的权重为:
将AHP计算出的第j项指标初始权重系数ωj用熵权值进行修正调整,则可以得到修正权重为:
3 构建云模糊综合评价模型
3.1 指标集与评价集的建立
假设评价对象为P,建立评价指标集U={u1,u2,…,um},建立评语集 V={v1,v2,…,vn}。对 U 中的每个指标依据评语集进行模糊评判,得到综合评判矩阵
式中,rij为指标ui关于评语等级vj的隶属度。rij通过引入正态云模型来确定。
3.2 基于云模型确定指标隶属度
传统隶属度的确定方法主要是两种,一种是以专家经验知识通过多个专家进行评价确定隶属度,这种方法主观性因素影响太大。另一种是以隶属函数确定隶属度,但由于评价的模糊性和随机性,利用传统隶属度函数方法也有一定的缺陷。引入云模型确定隶属度,充分考虑评价的模糊性和随机性,能得到比较客观的隶属度值。云模型是李德毅等[10]在传统概率论和模糊数学的基础上,提出的一种用于实现定性与定量之间不确定性转换的模型。
设D为论域,T为论域D上的概念。若定义x∈D,且x是定性概念T的一次随机实现,满足x~N(Ex,En'2),其中 En'~N(En,He'2),x 对概念 T 的隶属度 μT为:

则隶属度在论域D上的分布为“正态云”。正态云模型是云模型中最常用的一种。云模型用3个数字特征来反映定性概念的定量特性——期望Ex、熵En和超熵He。Ex是定性概念在论域的中心值,是定性概念量化最典型样本值;En反映定性概念的不确定性,包括定性概念的模糊性和随机性;He是熵的不定性度量,反映论域中云滴的凝聚程度。在表示具有单侧特征的概念时,可用半降云和半升云表示[11]。
获取云模型数字特征的方法有逆向云算法和指标近似法[12]。对存在双边约束[Cmax,Cmin]的指标用指标近似法可求的数字特征:

式中,k为常数,可根据变量的模糊阈度来确定。
云的生成算法称为云发生器,指标的隶属度的确定可采用X条件正向云发生器算法[13]。其算法如下:
1)生成一个以期望En、均方差为He的正态随机随机数 En'~N(En,He'2);
2)根据期望Ex和特定输入值xi,根据式(14)计算隶属度μ;
3)输出一个云滴drop(xi,μ(xi));
4)重复上述步骤N次,得到N个云滴。对N个云滴中的随机隶属度μ(xi)求平均值得到平均综合隶属度为:
将虚拟装备操作训练中各指标的实测数据,运用X条件云发生器计算后,输出各评价指标对每个评语等级的隶属度,构成隶属度矩阵R。
3.3 确定模糊综合评价向量
由(U,V,R)构成一个模糊综合评价模型,对评价对象P的模糊综合评价向量Q为:

式中:W为各指标权重向量,R为综合评判矩阵,qj为对象P从整体上对第j个评价等级的隶属程度[14]。为了减少信息的丢失,使评价结果更加客观真实,采用加权平均原则[15]进行综合评分。设 H=(h1,h2,…,hn)为评价等级对应的具体分值向量,计算综合评分

4 应用实例
建立了基于三维虚拟空间的虚拟操作训练的综合训练平台,以某型武器装备的车体调平战勤操作训练为例,利用上述的综合评价模型,对虚拟操作训练进行综合评价。虚拟装备操作训练的操作界面如图2所示。
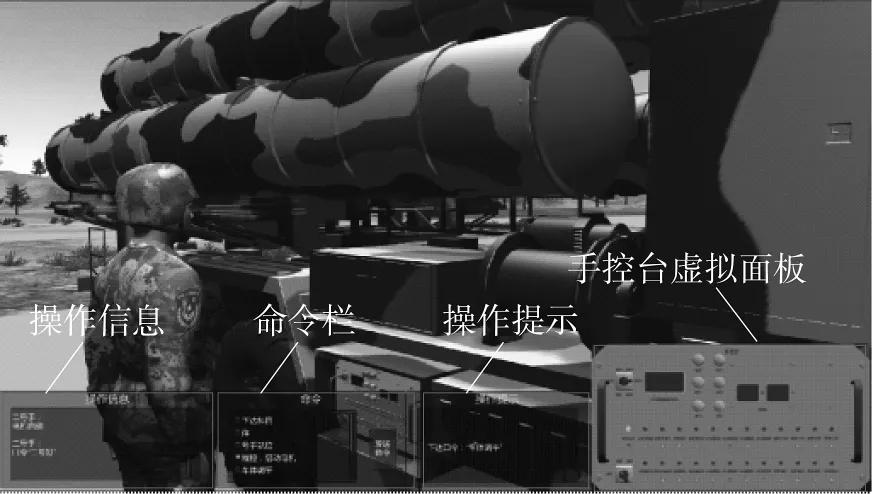
图2 虚拟训练的操作界面
4.1 确定指标集与评价集
车体调平战勤操作训练包含10个操作步骤,其中人员跑位类2项、口令类2项、装备操作类3项,装备监视类3项。装备操作类和人员跑位类对应 5 个操作耗时指标分别为 c1,c2,c3,c4,c5,装备监视类对应3个有效观察时间指标分别为e1,e2,e3,装备操作类和口令类对应5个操作错误数指标分别为 p1,p2,p3,p4,p5。13 个指标组成虚拟装备操作训练综合评价指标集U={c1,c2,c3,c4,c5,e1,e2,e3,p1,p2,p3,p4,p5},建立评语集 V={v1,v2,v3,v4,v5}。将评价结果分为5个等级,其中,v1为优秀,v2为良好,v3为中等,v4为及格,v5为不及格。评价等级对应的分数值如表1所示。
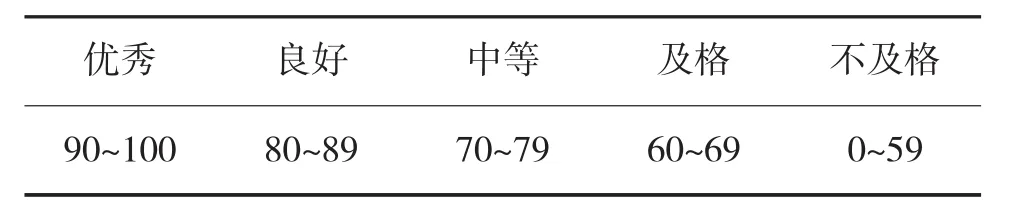
表1 评价等级分值
4.2 确定虚拟训练综合评判矩阵
根据车体调平战勤操作的标准操作流程,确定该操作的10步操作步骤对应的13个指标的标准值,建立如表2的虚拟装备操作训练评价指标标准。
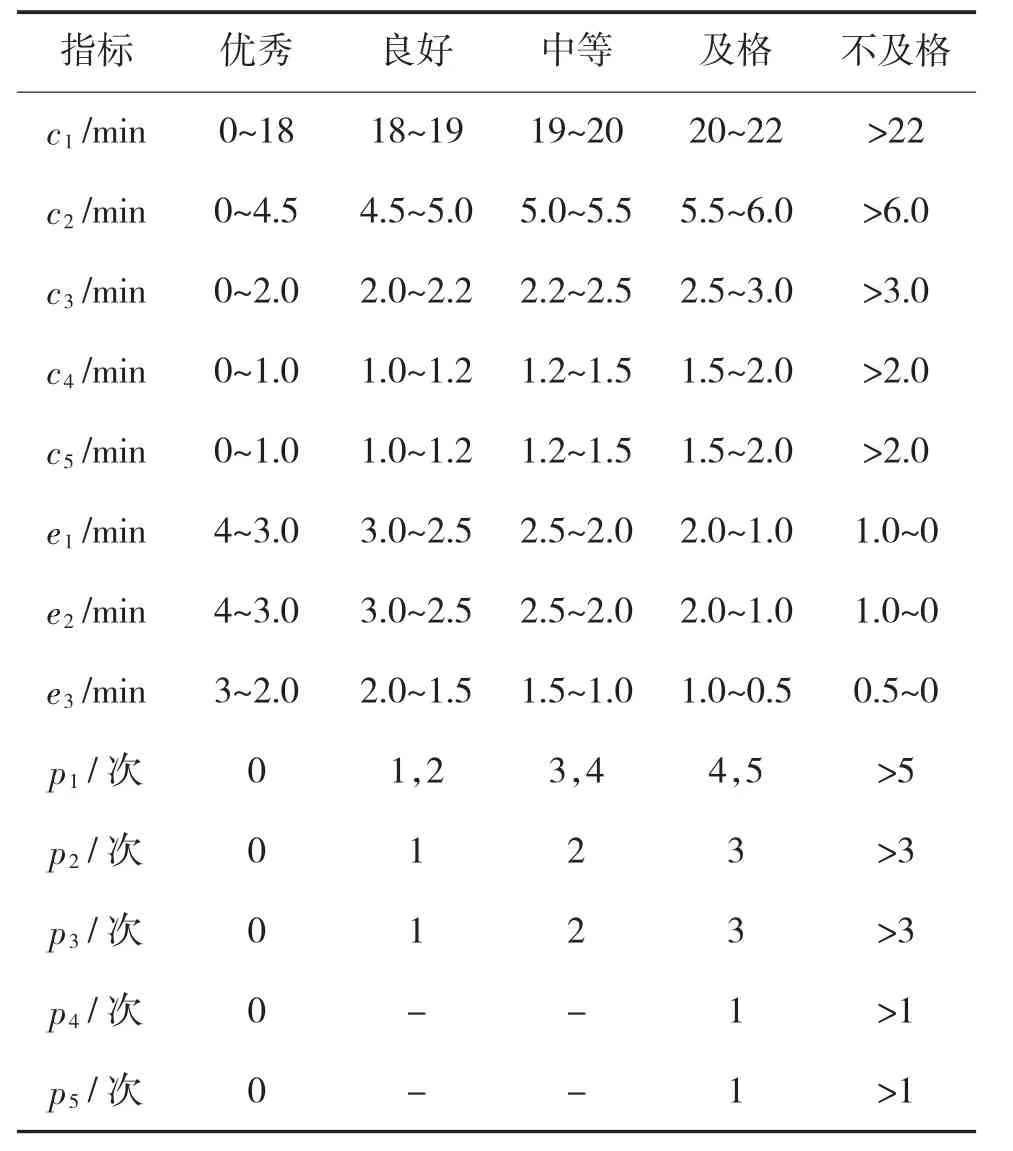
表2 虚拟装备操作训练评价指标标准
由于口令类操作步骤中正常操作时不会出现过多的错误操作,因此,定义没有错误操作为优秀,而有一次错误操作则为及格,其他则为不及格。操作错误数指标5个评价等级分别对应具体整数数值,根据虚拟操作训练的实测数据可直接给出对应隶属值。
操作耗时指标数值越小则操作水平越高,而有效观察时间指标的数值往往越大则操作水平越高。上述两种评价指标中,每一个等级的边界并无一明确的限定值,其取值主要基于专家对过往训练情况总结而来,因此,具有随机性和模糊性,而云模型作为兼具随机性和模糊性的数学模型,对于解决此问题比较方便。根据表2中操作耗时和有效观察时间评价指标标准,由式(15)计算出各评价指标对应的评价等级的正态云模型数字特征(Ex,En,He),具体见表3所示。
以操作耗时指标c1为例,由式(14)和表3中评价指标c1的正态云数字特征参数,在Matlab平台求的评价指标c1在不同评级等级下的正态云隶属度函数,如图3所示。
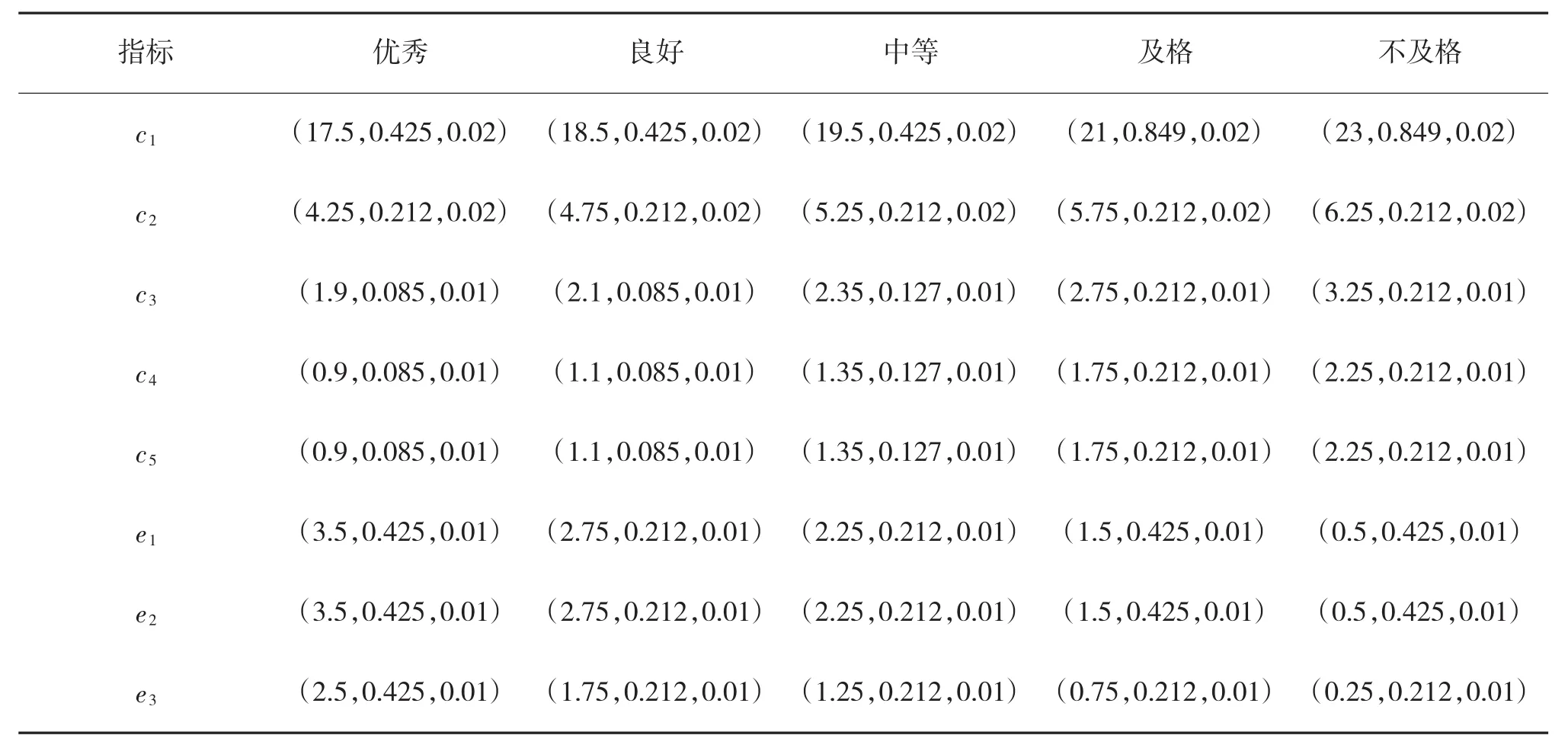
表3 虚拟装备操作训练评价指标正态云标准
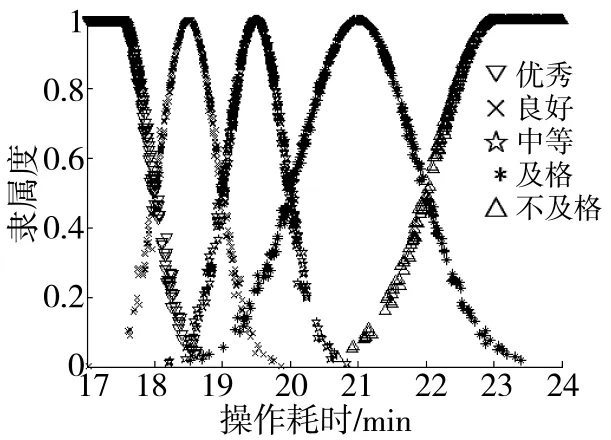
图3 评价指标c1的正态云隶属度
以一名操作水平高、经验丰富的操作人员在虚拟装备操作训练平台上对车辆调平战勤操作进行训练,训练平台得到各指标的相关数据如下:(18.2,4.3,1.9,0.9,1.0,3.0,3.2,2.6,0,1,0,0,0)
由表3中各个评价等级对应的正态云模型数字特征参数,将训练平台得到的实测值运用X条件正向云发生器求出隶属度,由于X条件正向云发生器计算结果具有随机性,为提高计算精度,进行100次计算,由式(16)求得平均综合隶属度uij见表4。
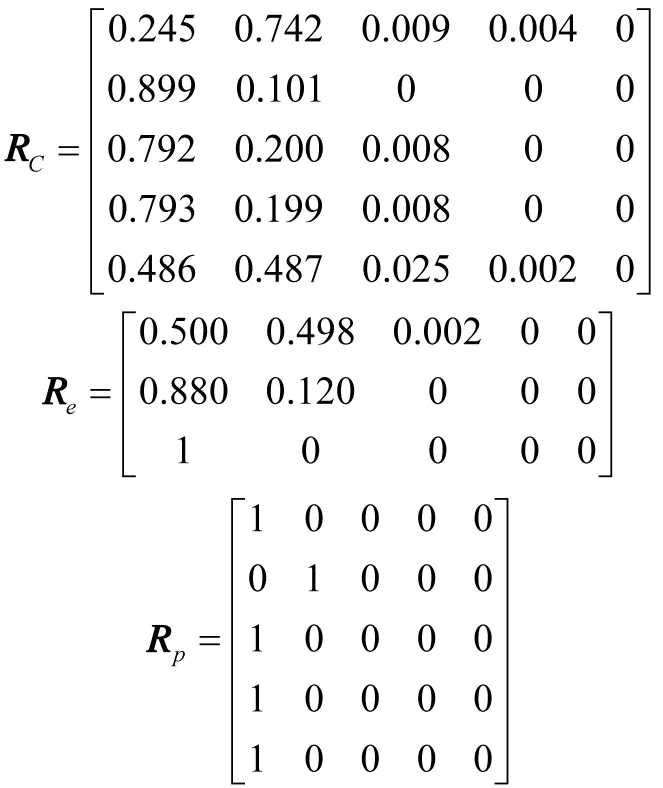
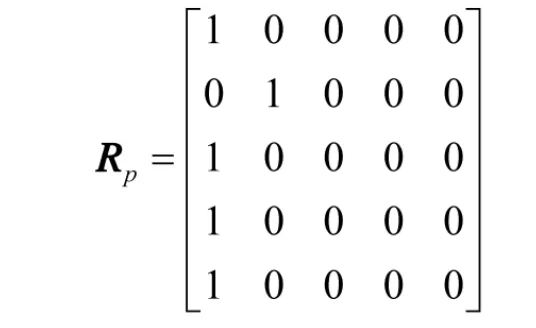
对上述所求隶属度进行归一化,再结合表2和操作人员训练的相关数据确定操作错误数评价指标的隶属度,得到操作耗时指标层、有效观察时间指标层、操作错误数指标层的综合评判矩阵分别为Rc、Re、Rp。
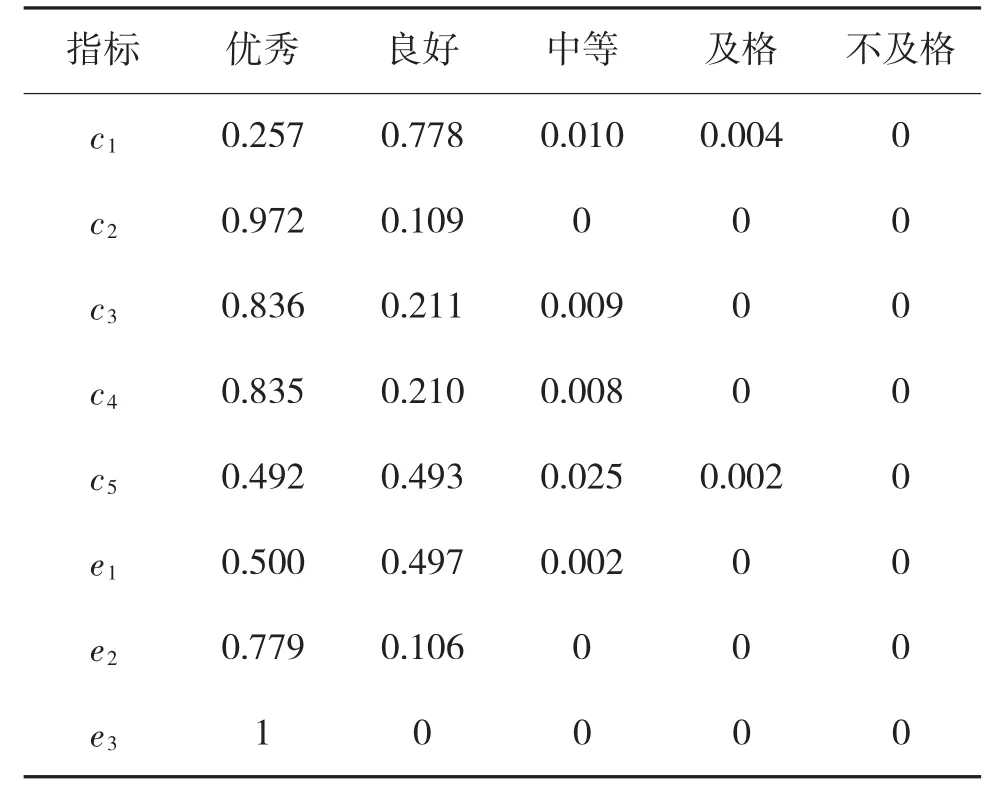
表4 云模型平均综合隶属度
4.3 虚拟训练评价结果
采用改进层次分析法和熵权法确定虚拟操作训练各指标权重。由式(1)、式(5)、式(6)将判断矩阵变换成一致性矩阵,求的主观权重为:
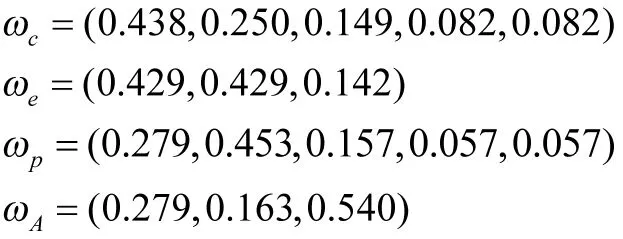
由式(7)~式(11)的得到客观权重为:

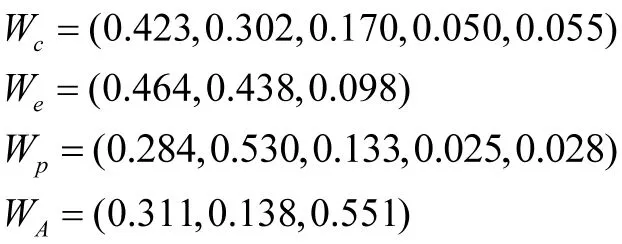
由式(12)得到修正权重为:
结合各指标层的综合评判矩阵和对应修正权重得综合评判矩阵RA
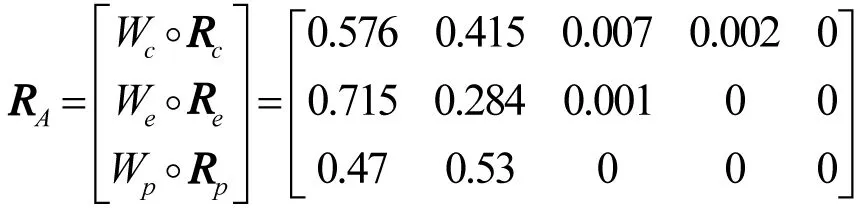
因此,总目标A层的模糊综合评价向量

综合评分采用加权平均原则,由表1得分值向量 H=(95,85,75,65,30)。根据式(18)得到综合评分为90.33分。这一评价结果反映了该名操作人员的真实水平,说明本文的虚拟装备操作训练综合评价模型具有可行性。
此外,本文采用的综合评价模型方法与所用类似方法的文献进行了比较。文献[4-5]中评价方法存在的一些不足在本文提出的模型方法中得到了弥补。文献[6]同样也引入云模型理论对电源车虚拟训练进行了较好的评价,但其只对评价集建立了云模型,仍采用专家打分来确定隶属度,使得评价结果受主观因素影响比较大。相对而言,本文采用的虚拟装备操作训练综合评价模型更加合理、科学,其评价结果也能较好地反映装备操作的真实水平。
5 结论
虚拟操作训练综合评价是一个涉及多指标、多层次的复杂问题,本文通过改进层次分析法和熵权法相结合确定客观、合理的指标权重,引入云模型来计算指标的隶属度,改善了专家打分带来的随机性造成的影响,并结合模糊综合评价法构建了云模糊综合评价模型。将该模型应用在某型装备的虚拟操作训练系统中,能够实现对操作人员的装备操作能力水平进行客观评价,应用实例表明该评价模型具有可行性。
猜你喜欢
公民与法治(2022年5期)2022-07-29 00:47:28
教学考试(高考物理)(2021年5期)2021-11-08 10:31:22
中医眼耳鼻喉杂志(2021年1期)2021-07-22 07:38:14
当代陕西(2020年17期)2020-10-28 08:18:18
人大建设(2018年5期)2018-08-16 07:09:00
电信科学(2017年6期)2017-07-01 15:44:57
统计与决策(2017年2期)2017-03-20 15:25:23
电测与仪表(2016年15期)2016-04-12 00:30:58
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10 08:41:14
燕山大学学报(2015年4期)2015-12-25 02:19:49