
全自动电子内窥镜测漏器的设计
2018-11-10 08:14耿向南彭澎许翔刘亚文
中国医疗设备 2018年11期
耿向南,彭澎,许翔,刘亚文
南京医科大学第一附属医院 临床工程处,江苏 南京 210029
引言
电子内窥镜是临床检查、诊断、治疗的主要设备,结构精密,造价昂贵[1-2]。尽可能的延长其使用寿命,减少故障率则是临床工程师及医护人员不断研究的课题[3-5]。在临床使用统计中,多数故障都是由于不正确的操作、未按流程的清洗消毒或者不到位的保养引起的。因此,内窥镜的正确操作和日常维护都至关重要[6-7]。
内窥镜结构是与外界密封绝缘的,外界的水气不允许进入镜体内部,一旦内镜密闭腔体发生破损,诊疗时人体腔内的分泌物、粘液,或者清洗消毒时液体进入镜子内部,则会腐蚀内镜结构,造成角度钢丝腐蚀、易断,角度活动受限,导光束变硬变脆,更严重时有可能造成电荷耦合器件(CCD)烧坏。镜体组件大修更换,医院不仅需要承担高额的维修费用,同时也降低了内镜的使用率及使用寿命[8-10]。
现今使用内镜进行诊疗及手术非常普遍。许多医院由于病人量过大,内窥镜数量配比率较低,同时清洗消毒人员配备不够,漏水测试则是最容易被忽略的步骤。虽然减少了漏水测试的步骤从表面上减少了清洗消毒的时间,但是却大大增加了内镜的使用风险及故障率。据调查,我院内窥镜测漏工作与规程所要求的每次清洗消毒前都必须测漏相距甚远,主要原因在于测漏时间耗时较长。我院使用浸泡测漏法,利用气泵向内镜中注气,浸泡在水中观察内镜气泡,并且要转动角度旋钮,在水中每个角度打弯静止30 s观察漏水情况。该过程需要清洗消毒人员全程观察气泡漏气情况,而且检出阳性率较低,让清洗消毒人员觉得是在做“无用功”。同时缺乏相应的监管机制,所以测漏这一工作并未能够做到尽善尽美[11]。
黄建勋等[12]设计的自动测漏器能够较好地对内镜进行测漏工作,正确率高。但不足之处在于角度旋钮仍需要人工转动。本文旨在设计一款全自动的内镜自动测漏装置,整个测漏过程严格按照规程。该测漏器不仅可以在镜子直角度下进行测漏,也可以根据测漏规程利用设计的抓手自动转动角度旋钮,测漏过程更加符合规范,结果更加准确。
1 系统设计
1.1 测漏原理
常用的测漏法有气压测漏法(干测漏)和浸泡测漏法。电子内窥镜结构分为镜身外部层和内部组件结构,两者之间有一密闭腔,测漏就是往这一密闭腔中注入空气。气压测漏法通过检测气压,观察气压的变化情况判断是否有泄漏。浸泡法则是把内镜浸泡在水中,观察是否有气泡冒出从而判断是否有漏水现象。这两种方法都可以较为直观准确地判断出内镜是否有漏点。
根据规程,不管是气压测漏法还是浸泡测漏法,都需要人工转动角度旋钮,而自动测漏就是需要在没有人工介入的情况下自动转动角度旋钮,这也是本文设计的重点。
1.2 硬件设计
测漏器由几部分组成:MCU及其外设、气泵、气压传感器、角度旋钮手、外接电源。系统硬件结构图,见图1。
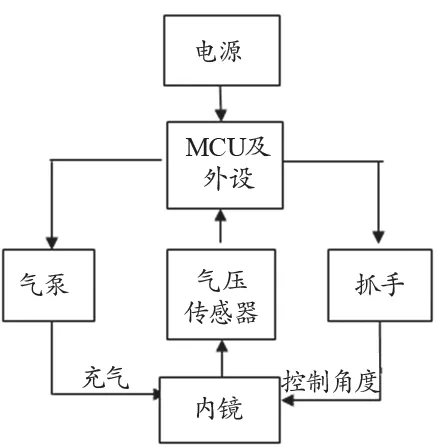
图1 系统硬件结构图
MCU采用MSP430F149,MSP430F149是TI公司设计生产的一款超低功耗的16位单片机,具有低电压、超低功耗、快速苏醒、具有片内比较器等特点,自带A/D变换,因此在进行压力检测时不需要额外增加A/D电路,被广泛用于医疗设备设计中[13-14]。气压传感器选择MP3V5050,该传感器工作范围为0~50 kPa。气压值与输出电压关系为UOUT=S×(0.018×P+0.04),P为检测气压值,单位为kPa。内镜测漏的气压在24 kPa左右,其压力值在传感器线性范围内,当工作压力24 kPa时,气压传感器的输出为1 V左右,可以直接进行A/D转换,不需要增加放大电路。
电子内窥镜的角度旋钮一般由两部分组成。以奥林巴斯电子胃镜GIF-260为例(图2),角度旋钮由上下角度旋钮(U、D)及左右角度旋钮(L、R)组成。内镜操作者分别通过控制这两个旋钮旋转,通过内镜角度钢丝控制内镜先端部的弯曲。旋钮的设计根据人体工程学设计,左右角度旋钮由5个齿组成,上下角度旋钮则位于上下角度旋钮下方,由6个齿组成。
角度旋钮抓手由左右角度旋钮抓手、上下角度旋钮抓手组成,利用步进电机及减速器提供旋转动力。本文根据内镜旋钮的工程学结构设计旋钮抓手,可同时锁定上下角度旋钮及左右角度旋钮,利用3D打印技术实现[15-16]。角度旋钮抓手,见图3。左右角度旋钮抓手设有凸台,在与左右角度旋钮配合时可卡在其凹槽中,上下角度抓手“门”字型的设计则可与上下角度旋钮齿配合,在电机的带动下,一起进行转动。考虑到左右、上下角度分开操作一方面费时,另一方面也需要更多的部件。所以设计的抓手正转时同时打右下角度,反转时同时打左上角度。各保持30 s进行测漏,在满足拉开弯曲橡皮、露出微小破口的同时也节约了时间。根据不同内镜所能弯曲的角度的最大值,将角度值限制在一个安全范围,检出弯曲橡皮上微小破损口的同时也能保障内镜不会因角度旋钮受力过大而损坏。

图2 内窥镜角度旋钮
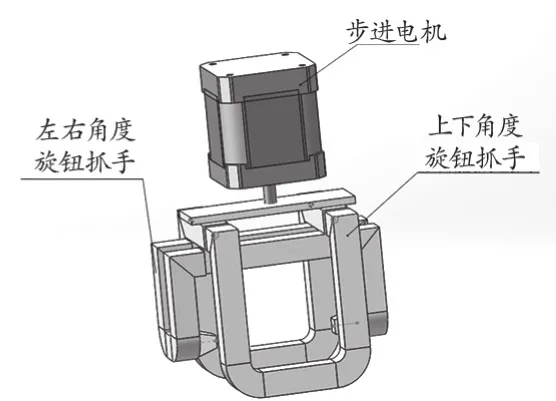
图3 角度旋钮抓手
上下角度旋钮抓手的分解图,见图4。由抓手两个部分、连杆、弹簧及弹簧堵头组成。连杆与抓手部分1固定连接,连杆右端有外螺纹攻丝,弹簧堵头内螺纹攻丝,两者通过螺纹连接。抓手部分2中A孔的直径略大于连杆直径,小于弹簧直径,而弹簧堵头及弹簧的直径小于B孔直径,因此弹簧在抓手部分2中的管腔内部活动,抓手可以根据角度旋钮的大小进行调节,弹簧起到紧固调节的作用。
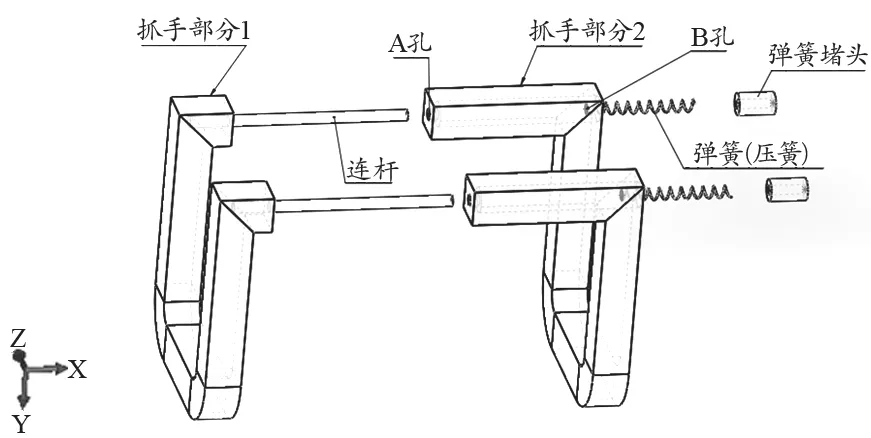
图4 角度旋钮抓手分解图
1.3 工作流程
使用奥林巴斯专用的内镜测漏连接器(型号:MB-155),连接测漏器和内镜,按下开始按钮后,MCU驱动气泵向内镜充气。在压力达到预设值后(24 kPa),气泵停止,MCU检测气压值,等待30 s后,如果压力下降值小于预设压差,则认定在直角度情况下未检测出内镜漏气。然后MCU驱动电机带动抓手正转打角度,对应同时向左,向上打角度,打到预设角度后,电机停止并等待30 s,测定压差,如果压差小于设定,再进行正转打角度,如果3次检测均小于设定压差,那么认定内镜测漏通过。如果有任意一次检测压力差大于预设值,则认为内镜有漏气,需要进一步判断漏气点。工作流程图,见图5。

图5 系统流程图
2 结果
对我院消化内镜中心的奥林巴斯电子胃镜、电子肠镜进行检测,与浸泡测漏法进行对比,测漏结果为阴性的均保持一致。但在检测GIF-260Z(放大电子胃镜)存在一例假阴性。在气泡法测漏中发现内镜存在很微小的漏点,在水中产生的气泡量很小。故在使用本文设计的测漏器时,在全程90 s的测漏过程中,气压的下降未达到所设置的阈值。当把测漏过程每个周期时间延长至2 min(全程测漏6 min)时则可检出阳性。故本文设计的测漏器在提高检测速度的同时也会一定程度地影响正确率,这需要在不断的临床试验中选出最合适的阈值及检测时间。测漏结果对比表,见表1。

表1 测漏结果对比表
3 结论
该测漏器可以准确快速对内镜漏气情况进行检测,无须人员干预,极大简化了清洗消毒人员的工作量。角度旋钮抓手也能够较好的匹配不同型号的内镜。清洗消毒人员只需要连接好管路,并将抓手固定在操作旋钮上,即可实现一键测漏。相比于浸泡测漏法更加令清洗消毒人员接受,在测漏的同时也可以进行其它内镜的清洗消毒工作,在不影响工作效率的同时对内镜的测漏有一个直观的结果。减少了内镜由于漏水未被及时发现而导致大修的可能性,节省了科室维修经费的同时也延长了内镜的使用寿命,提高科室的经济效益,也能够更好的为患者服务。
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
现代仪器与医疗(2021年6期)2022-01-18
幼儿画刊(2021年5期)2021-12-02
现代仪器与医疗(2021年4期)2021-11-05
日用电器(2021年7期)2021-08-17
装备制造技术(2020年12期)2020-05-22
模具制造(2019年4期)2019-06-24
科学家(2017年13期)2017-08-11
浙江大学学报(工学版)(2015年7期)2015-03-01
中国卫生标准管理(2015年3期)2015-01-27
