对转永磁同步电机无差拍预测控制
2018-11-09 01:59黄守道马河涛张其松王家堡
大电机技术 2018年5期
黄守道,马河涛,张其松,王家堡
对转永磁同步电机无差拍预测控制
黄守道,马河涛,张其松,王家堡
(湖南大学电气与信息工程学院,长沙 410082)
在建立对转永磁同步电机(Anti-rotary permanent synchronous motor,Anti-rotary PMSM )在d-q坐标系下数学模型的基础上,针对负载突变,两侧转子转速发生变化,由于PI调节速度较慢,两侧转子易发生失步,导致系统不可控的现象,提出电流环采用无差拍预测控制,速度环采用PI调节器的双闭环控制策略。在Matlab/Simulink中搭建仿真模型,仿真结果表明,该控制方法在稳定运行和突加负载的情况下,具有转速变化小,稳定性好的优点,无差拍预测控制比传统的PI调节器动态响应快,可以有效解决对转电机的失步问题。
对转永磁同步电机;无差拍预测控制;矢量控制
0 前言
21世纪是海洋的世纪,在海洋探索过程中自主水下航行器正发挥着越来越重要的作用,世界上诸多国家已在开展水下自主航行器的研究工作[1-2]。对转螺旋桨技术是现代海洋装备驱动的主流技术,后桨叶能够有效利用前桨叶未利用的涡动能,节能10%~20%。传统的对转螺旋桨由2台独立的电机或者1台电机加行星齿轮驱动,体积庞大,可控性较差。文献[3]设计了一种可直接驱动对转螺旋桨的盘式单定子双转子永磁同步电机,其结构由一个定子和两个永磁转子组成,两个永磁转子分别处于定子的两侧,只需用一套三相变频器驱动。该电机具有体积小,结构简单,效率高,低振动的特点,非常适合于如鱼雷等水下航行器的对转螺旋桨的驱动。文献[4]根据永磁电机原理,用电机电压电流表达式在Matlab/Simulink中搭建了对转电机的模型,通过仿真验证了本体设计可行性,并且将矢量控制应用于对转电机控制,对两转速调节器的输出量取均值再进行q轴电流的调节,在负载转矩相同且恒定时,两转子转速能保持一致,但当负载不对称突变时,转子容易失步。文献[5]~[6]对永磁无刷直流电机速度环分别采用模糊PI控制和分离积分项的双输入模糊控制,实现了转速快速调节和稳定运行,但是对两转子不对称运行中存在对失步问题没有提及。文献[7]~[8]将直接转矩控制应用于对转电机,采用外转子转速计算参考转矩,并使用参考磁链来调节外转子磁链,可以让内转子转速跟随外转子转速,但是仍然会出现两转子失步现象。
近年来对转电机控制方法的研究取得一定的成果,但大多局限于平衡负载下的研究,当负载突变不对称时,控制性能还达不到要求。对转永磁同步电机是一个非线性,多变量,强耦合的复杂系统,控制非常复杂。早在1985年,Gokhale 最先提出了无差拍控制策略,并将其应用在电力电子变流器中[9],该控制方法可以大幅度地提升系统响应速度,并能实现精确控制,因此,无差拍控制技术近年来得到了广泛的应用。
本文首先研究对转永磁同步电机数学模型,其次介绍无差拍预测控制等原理,在此基础上将无差拍预测控制应用于对转电机,仿真结果表明本文提出的控制策略有效解决了对转电机不对称负载下的失步问题,同时保证控制系统较快的动态响应和较小的静态误差。
1 对转永磁同步电机原理及其数学模型
由于对转永磁同步电机的特殊绕线方式,给定子通入对称三相电流时,会在两侧气隙中产生一对方向相反,转速相同的旋转磁场,据此对转永磁同步电机可等效为串联的两个参数相同的永磁同步电机。为模型推导和数学分析,需做如下假设:(1)假设转子永磁磁场在气隙空间呈正弦分布,定子绕组中的感应电动势也是正弦波;(2)假设磁路线性且不饱和,电感参数恒定;(3)忽略电机涡流损耗与磁滞损耗;(4)转子上无阻尼绕组。
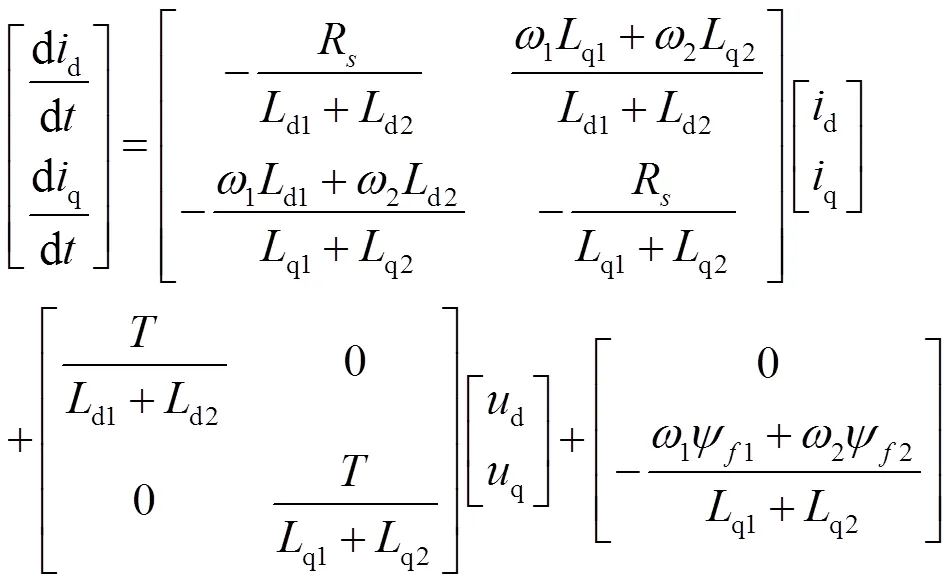
参考普通永磁同步电机的数学模型,建立对转电机数学模型。在d-q坐标系下的定子电压方程如下:


对转电机电磁转矩方程:

式中,为极对数;T1,T2分别为两转子的电磁转矩。
为构建对转电机的预测模型,首先选择d-q轴电流作为状态变量,选择d-q轴电压矢量作为输入信号矢量。
由式(1)可得系统的状态空间函数
在预测控制算法中,每一步预测都是以一个周期内电流和转速保持不变为前提。所以需要利用欧拉算法将对转永磁同步电机模型做离散化处理。其原理为
式中,为采样周期。
对转永磁同步电机的离散化数学模型为

图1所示为Matlab/simulink仿真对转电机本体模型和电机实物图。
2 对转电机无差拍预测控制器的设计
无差拍预测控制的基本原理是:将+1时刻的电流预测值作为时刻的电流给定值,然后将该电流送入电压计算表达式求得电压指令值,再将该值送入 PWM模块,获得最终需要的开关信号。
因为盘式对转永磁同步电机没有凸极效应,所以可假设d1d2q1q2= L。
整理公式(5)得在+1时刻d,q的预测值

根据无差拍控制技术的基本原理,令
式中,id(),iq() 为第时刻的电流给定值。将式(7)带入式(6)并整理可以得到第时刻的电压给定值:
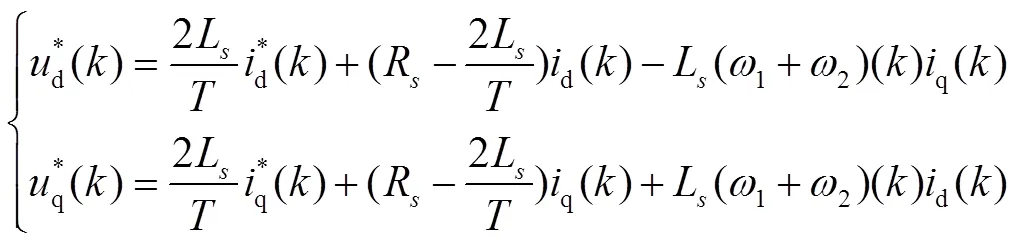
式中,U*d(k), U*q(k)为k时刻施加在PWM 模块上的电压值。无差拍预测控制器实现框图如图2所示。
对转永磁同步电机整体控制框图如图3所示。

图3 对转电机整体控制框图
3 仿真研究
为了验证文中所提出无差拍预测控制策略的优良性能,在Matlab/Simulink环境下与传统的PI控制进行了仿真结果对比。
设置对转永磁同步电机的参数为:额定电压560V,电枢电阻为2.875Ω,极对数为4,双边转子的dq轴电感均为4.25mH,转动惯量为0.08 kg·m2两转子的永磁磁链均为0.175Wb。
3.1 平衡负载下的对比仿真
仿真时长0.5s,对转永磁同步电机两侧转子带10N·m的平衡负载启动,在0.15s时使两侧平衡负载变为5N·m,在0.2s时两侧转子平衡负载恢复为10N·m。图4、5分别为平衡负载下传统矢量控制和无差拍预测控制的仿真结果图。
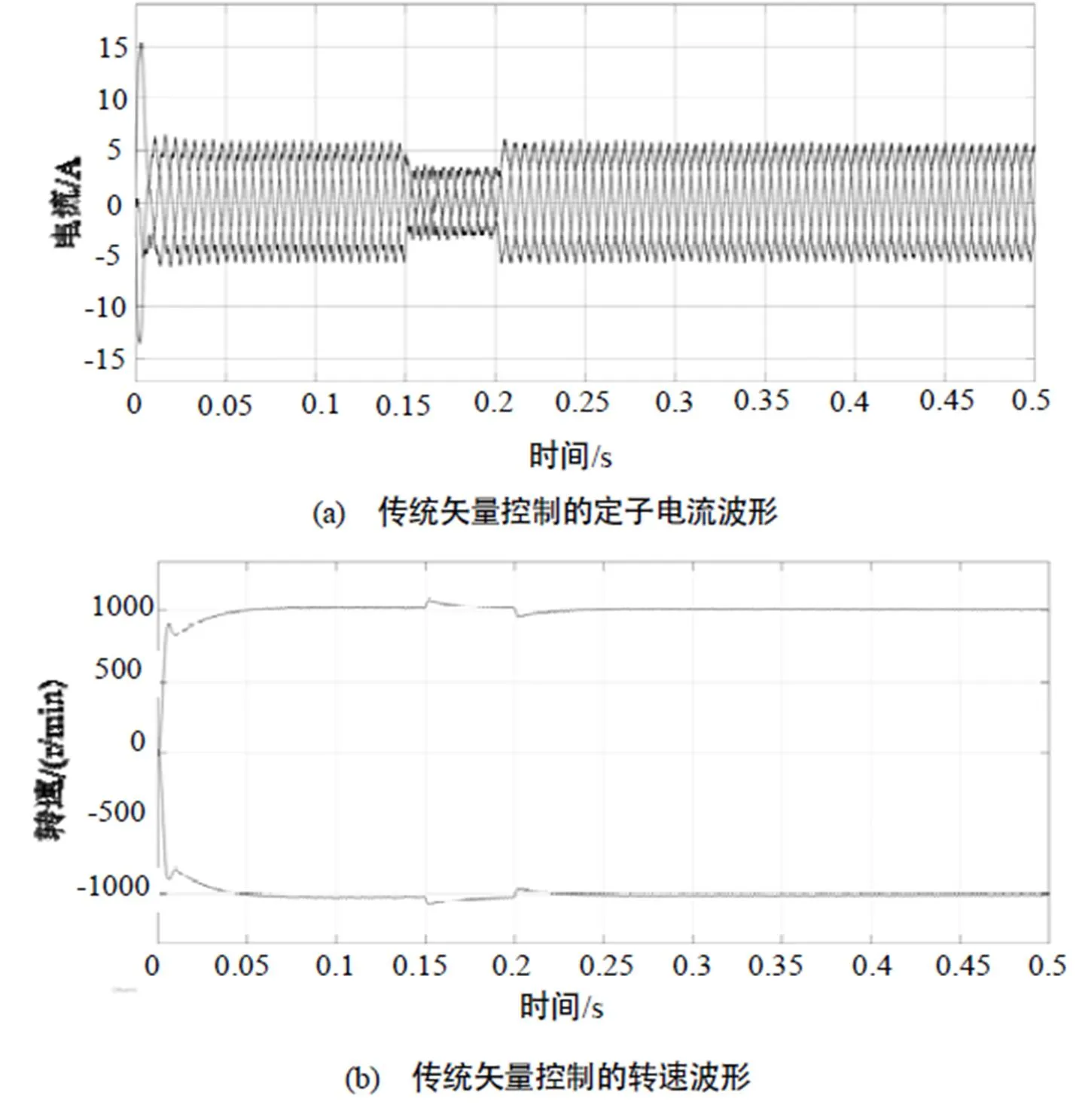

图5 平衡负载下无差拍预测控制的仿真结果图
由图4、5可知,在传统矢量控制模式下,对转电机谐波电流较大,达到给定速度需要0.05s,动态响应速度较慢;当电机运行趋于稳定后,转矩波动幅度很大,不利于对转电机的运行,也表明传统矢量控制性能有待改进。在无差拍预测控制方式下,对转电机电流波形平滑对称,达到给定速度仅需要0.01s,具有更快的动态响应速度,电机稳定运行时,转矩基本保持恒定,表明无差拍预测控制具有较好的控制性能。
3.2 不平衡负载下的对比仿真
仿真时长为0.5s,对转永磁同步电机两侧转子带10N/m的平衡负载启动,在0.15s时两侧变为不平衡负载5N·m和6N·m,在0.2s时两边转子负载恢复为平衡负载10N·m。图6、7分别为不平衡负载下传统矢量控制和无差拍预测控制的仿真结果图。
由图6、7可知,当对转永磁同步电机处于传统矢量控制模式下,两侧负载发生不对称突变时,两侧转子发生失步现象,电机处于不可控状态,由此可知传统矢量控制不能够满足对转电机的控制要求。当电机处于无差拍预测控制方式下,电机负载发生不对称突变时,两侧转子速度虽出现波动,但是当电机恢复至对称负载时,电机可以逐步恢复至同步状态并稳定于给定速度,同时从转矩波形和电流波形也能够看出,对转永磁同步电机在不对称负载消除后能够逐步恢复稳定状态。

图6 不平衡负载下传统矢量控制的仿真结果图

4 结论
本文在建立对转永磁同步电机模型,介绍无差拍控制原理的基础上提出电流环采用无差拍预测控制,速度环采用PI调节器的双闭环控制策略,通过在对称负载和不对称负载下仿真研究,表明本文提出的控制策略能够有效降低谐波电流,克服传统矢量控制调节速度慢和负载不对称突变时双边转子易失步的缺点,满足对转永磁同步电机的使用要求。
[1] METIN A, HUANG S, LIPO T A. Design, analysis, and control of a hybridfield-controlled axial-flux permanent-magnet motor [J]. IEEETransactions on Industrial Electronics, 2010, 57(1): 78 – 87.
[2] 张式勤, 邱建琪, 储俊杰, 等. 双转式永磁无刷直流电动机的建模与仿真 [J]. 中国电机工程学报, 2004, 24(12): 180 -185.
[3] Caricchi F, Crescimbini F, Santini E. Basic principle and design criteria of axial-flux PM machines having counter rotating rotors[J]. IEEE Transactions on Industry Applications, 1995, 31(5): 1062-1068.
[4] 徐海珠,谢顺依,张林森等.对转永磁同步推进电机的矢量控制[J].微电机,2011,10:10-13.
[5] 郑勇,李宏,张群等.基于模糊PI 混合控制的自主水下航行器推进系统[J].测控技术,2011.30(10):65-67.
[6] 郑勇,李宏,张群等.基于模糊控制的对转永磁无刷直流电动机调速系统[J].微电机,2011,4:40-42
[7] 张恒.盘式对转永磁同步电机控制方法研究[D].湖南大学,2014.
[8] 姜燕,黄钟,成双银等.对转永磁同步电机直接转矩控制[J].电工技术学报,2015,30(10):101-107.
[9] Oikonomou N,Gutscher C,Karamanakos P,et al. Model Predictive Pulse Pattern Control for the Five-level Active NeutralPoint Clamped Inverter[J].IEEE Transactions on Industry Applications,2013,49(6):2583-2592.
Control of Anti-rotary PMSM based on Deadbeat Predictive Control
HUANG Shoudao, MA Hetao, ZHANG Qisong, WANG Jiabao
(College of Electrical and Information Engineering, Hunan University, Changsha 410082, China)
Based on the mathematical model of the anti-rotary permanent synchronous motor in the d-q coordinate system, the rotor speed on both sides is changed due to the sudden load change. Because the PI adjustment speed is slow, both sides of the rotor are prone to out-of-step, resulting in uncontrollable system. It is proposed that the current loop adopts deadbeat predictive control, and the speed loop adopts a PI controller dual closed-loop control strategy.The simulation model is built in Matlab/Simulink. The simulation results show that the control method has the advantages of small speed change and good stability under the conditions of stable operation and sudden load. The performance of the dead-beat predictive control is better than that of traditional PI regulators in fast response, can effectively solve the problem of out-of-step motor.
anti-rotary PMSM; dead-beat predictive control; vector control
TM351
A
1000-3983(2018)05-0025-06
2018-06-10
黄守道(1962-),2005年毕业于湖南大学,博士,博士生导师,主要研究方向为电力推进与伺服传动技术,教授。

猜你喜欢
电机与控制应用(2022年4期)2022-06-27
电机与控制应用(2022年4期)2022-06-27
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电测与仪表(2015年21期)2015-04-09
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年12期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28