无刷双馈电动机功率因数特性控制技术研究
2018-11-09 00:39郝鹏,王正
大电机技术 2018年5期
郝 鹏,王 正
无刷双馈电动机功率因数特性控制技术研究
郝 鹏,王 正
(沈阳工业大学电气工程学院,沈阳 110870)
目前,国内对无刷双馈电动机功率因数的研究成果中定性分析多,实验数据少,而功率因数低是一直制约其工业化的关键问题。本文以无刷双馈电动机数学模型为基础,根据磁场定向矢量控制原理,建立控制绕组电流与功率绕组有功分量与无功分量的关系,进而推导出功率因数与控制绕组电流和电机参数之间的关系式并对无刷双馈电动机功率因数控制技术进行理论分析,同时研制了30kW实验样机进行实验研究。理论分析和实验表明,所提出的无刷双馈电动机功率因数控制技术是可行的,由此可提高系统运行效率和稳定性。
无刷双馈电动机;功率因数特性;矢量控制;有功功率;无功功率
0 前言
无刷双馈电机(brushless doubly-fed machine,BDFM)是一种新型交流电机,电机定子上嵌有两套绕组,分别是功率绕组和控制绕组,转子结构分为磁阻型、笼型、绕线型和混合型,因此电机的特性也不相同。本文BDFM采用磁阻转子结构。BDFM 既可作为变速恒频发电机,也可作为变频调速电动机。作为电动机运行时,功率绕组直接接工频电源,控制绕组接逆变器,调节逆变器输出电压的频率、幅值和相位,可以调节电机的转速和功率因数。与传统电机相比,无刷双馈电机的优势在于:取消了电刷和滑环,提高了系统的可靠性,同时所要求的变频装置容量较小,仅为转差功率,大大降低了系统的成本。因此无刷双馈电动机广泛应用于大功率的风机、泵类负载的节能变频调速中,具有十分广阔的应用前景[1, 2-4]。文基于BDFM功率因数低的问题,采用矢量控制策略,功率绕组电流全部提供转矩电流,控制绕组电流提供励磁电流,从而实现功率绕组功率因数校正目的。
1 无刷双馈电动机工作原理
BDFM可运行在三种不同状态:(1)异步运行状态,功率绕组接入电网电源,控制绕组串接启动电阻,实现自起动异步运行;(2)同步运行状态,电机稳定运行时,控制绕组通入直流电流进行励磁,改变励磁电流大小,可实现电机功率因数调节;(3)双馈运行状态,控制绕组由变频装置供电,通过调节控制绕组电流幅值、频率和相位来实现变频调速,同时可以调节功率因数[4]。BDFM结构如图1所示。

图1 无刷双馈电机结构图
无刷双馈电机功率绕组接工频电源(p),控制绕组接变频电源(c),由于定子两套绕组同时有电流流过,因此在气隙中产生两个不同极对数的磁场,这两个磁场通过转子的调制发生交叉耦合,从而实现能量传递。经分析,可得稳态运行时转子转速表达式为[5]:

2 无刷双馈电动机数学模型
在转子速dq坐标下,BDFM的电压、磁链、功率方程分别为[6-7]:
(1)电压方程

(2)磁链方程
(3)转矩方程
电机的电磁转矩表示为:

(4)功率方程
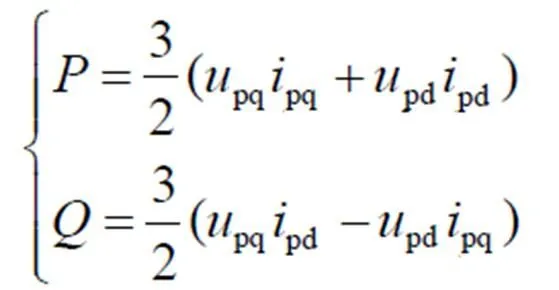
(5)功率因数方程
功率绕组的功率因数为[9]:

3 无刷双馈电动机矢量控制策略
3.1 矢量原理图

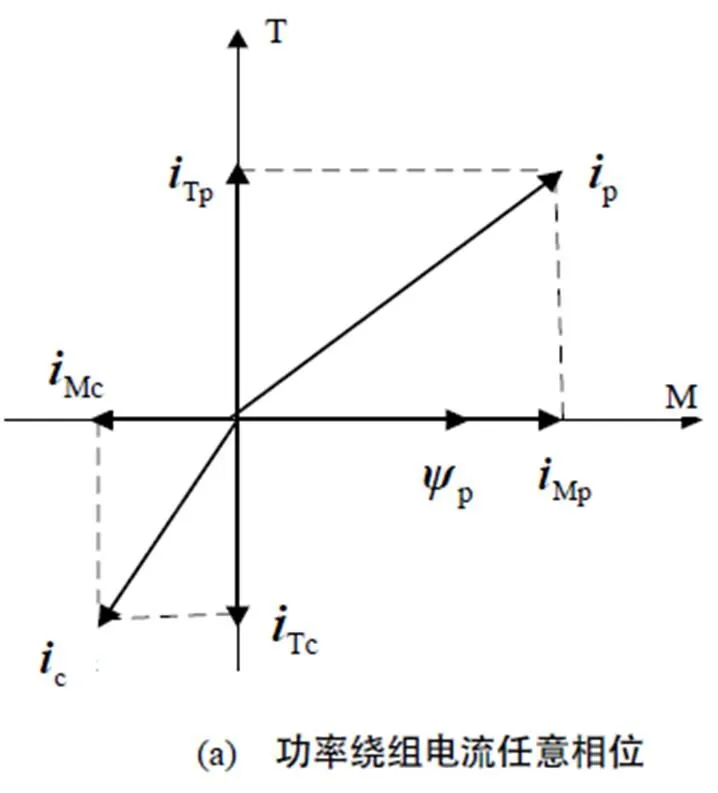
由上述矢量原理图可得:

由式上式可得:

由此可计算出控制绕组电流幅值与相位。
3.2 控制原理图


图3 无刷双馈电动机矢量控制系统
4 仿真结果分析
为了验证上述控制策略的正确性,根据无刷双馈电机的数学模型,利用 Matlab / Simulink 搭建了无刷双馈电机的仿真模型[10-12],电机相关参数见表1。

表1 BDFM 参数表
BDFM由异步起动,迁入同步运行,达到同步转速时切入超同步运行,电机转速如图4所示。电动机在0.8s时负载由20N增加至40N,电磁转矩如图5所示,经过微小的震荡后进入平稳状态。此时测得控制绕组电流变化波形如图6所示,功率绕组电流变化波形如图7所示,由图可以看出,随负载增加时控制绕组和功率绕组电流都变大,并且功率绕组电流跟随性能更好,也即功率绕组提供更大的转矩,控制绕组提供部分转矩,与理论分析相一致。

图4 转速曲线

图5 负载变化曲线

图6 控制绕组A相电流曲线

图7 功率绕组A相电流曲线
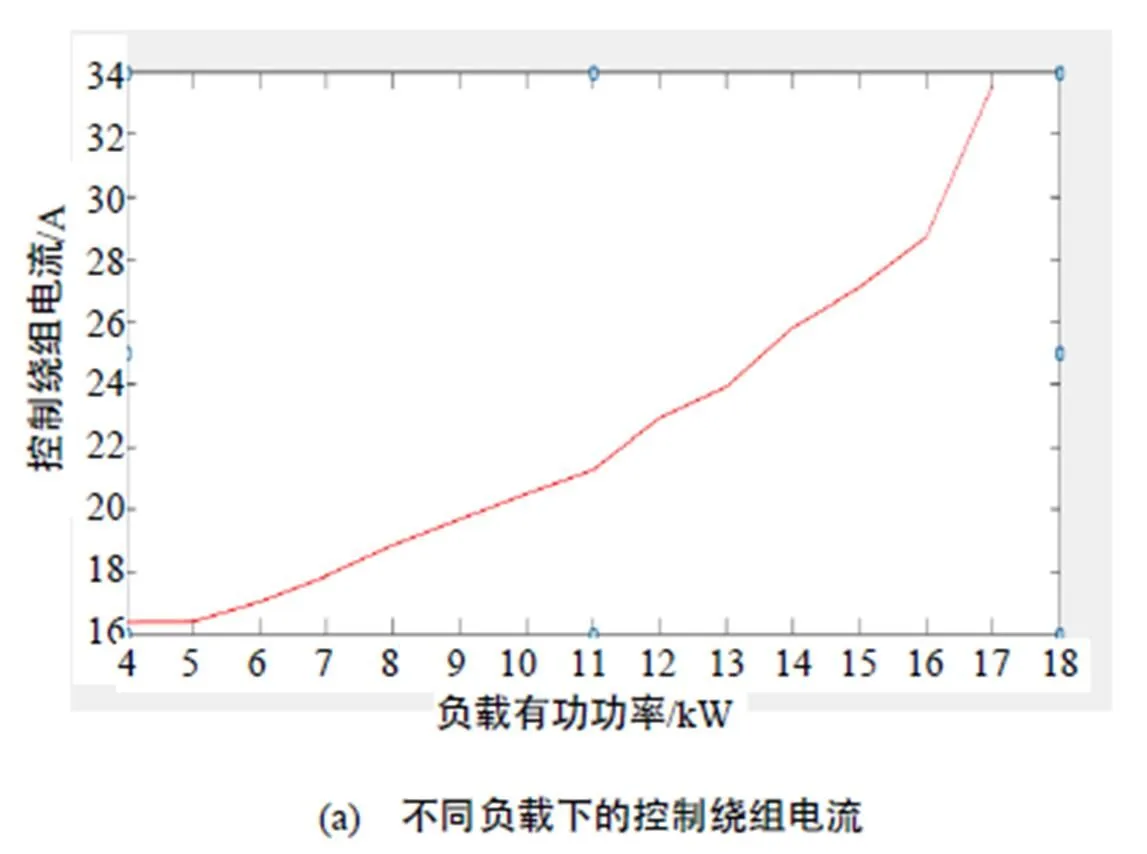
5 实验验证
实验样机额定功率为30kW,功率绕组极对数为3,控制绕组极对数为1,同步转速为750r/min,负载由电励磁发电机与交流智能假负载(电阻性负载)组成,实物图如图8所示。实验在1000r/min转速下进行加载,如图9所示,得出不同负载与控制绕组电流(a)、功率绕组电流(b)、功率绕组功率因数的曲线(c),控制绕组电流与功率绕组功率因数曲线(d)。同理,在转速为1200r/min下,如图10所示,得出不同负载与控制绕组电流(a)、功率绕组电流(b)、功率绕组功率因数的曲线(c),控制绕组电流与功率绕组功率因数曲线(d)。由实验结果可以看出在不同转速下,无刷双馈电动机功率绕组和控制绕组的电流随负载增加而随之增大趋势,最后随着控制绕组电流的增大,功率绕组功率因数在增加,与理论分析一致,从而验证了控制策略的可行性。


6 结论
本文在无刷双馈电动机数学模型的基础上,通过矢量控制原理,建立了功率绕组有功功率和无功功率与控制绕组电流之间的关系,并对功率绕组功率因数特性进行了深入分析,提出了一种新的无刷双馈电动机的控制方法,实现了无刷双馈电动机双馈稳定运行时功率绕组功率因数校正的目的。通过仿真和实验,验证了该方法的可行性。本文的控制方法为无刷双馈电机的变频调速提供了一条新的思路。
[1] Betz R E, Jovanovic M G. Theoretical analysis of control properties for the brushless doubly fed reluctance machine[J]. IEEE Transactions on Energy Conversion, 2002, 17(3):332-339.
[2] Poza J, Oyarbide E, Roye D. New vector control algorithm for brushless doubly-fed machines[J]. IECON. IEEE, 2002:1138-1143 vol.2.
[3] 黄守道. 无刷双馈电机的控制方法研究[D]. 湖南大学, 2005.
[4] 王凤翔, 张凤阁. 磁场调制式无刷双馈交流电机[D]. 吉林大学出版社, 2002, 02.
[5] 王正. 转差频率旋转坐标系的无刷双馈电机的数学模型与矢量控制研究[D]. 沈阳工业大学, 2006, 10.
[6] 常浩. 无刷双馈电机矢量控制系统研究[D]. 沈阳工业大学, 2006, 05.
[7] 王昌盛. 无刷双馈电机变频调速系统的研究[D]. 湖北: 华中科技大学, 2006.
[8] 王正, 厉建新. 无刷双馈电机双同步坐标系矢量控制系统仿真[J]. 沈阳工业大学学报, 2008(5):489-493.
[9] 张爱玲, 熊光煜, 刘振富,等. 无刷双馈电机能量传递关系和功率因数特性的实验研究[J]. 中国电机工程学报, 2011, 31(6):92-97.
[10] 汤海梅. 无刷双馈电机的效率分析及仿真研究[D]. 天津大学, 2007.
[11] 黄科元. 无刷双馈电机调速系统研究[D]. 湖南大学, 2001.
[12] 刘晓鹏.无刷双馈电机变频调速系统的研究[D]. 太原: 太原理工大学, 2005, 05.
Research on Power Factor Control of Brushless Doubly-fed Motors
HAO Peng, WANG Zheng
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China)
At present, there are many qualitative researches on the power factor of brushless doubly-fed motors in China. But there are few experimental data, and low power factor is a key issue that has always restricted its industrialization.Based on the mathematical model of brushless doubly-fed motor, this paper establishes the relationship between the control winding current and the active component and reactive component of the power winding according to the principle of field-oriented vector control, and then derives the relationship between the power factor and the control winding current and motor parameters, as well as power factor control features. The theoretical analysis of the power factor control technology of the brushless doubly-fed motor was carried out, and a 30 kW prototype for experimental research was developed. Theoretical analysis and experiments show that the proposed brushless doubly-fed motor power factor control technology is feasible, thereby improving the system operating efficiency and stability.
brushless doubly-fed motor; power factor characteristics; vector control; active power; reactive power
TM301.2
A
1000-3983(2018)05-0042-06
2018-06-12
郝鹏(1988-),沈阳工业大学硕士研究生,研究方向电力电子与电力传动。

猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
测控技术(2018年9期)2018-11-25
电子制作(2016年1期)2016-11-07
设备管理与维修(2016年7期)2016-04-23
通信电源技术(2016年5期)2016-03-22
电测与仪表(2015年16期)2015-04-12
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年14期)2014-04-04
自动化博览(2014年4期)2014-02-28