基于语音及手势控制的智能助老助残系统*
2018-11-09 02:49刘子洋刘忠富赵宏宇刘冠初
山西电子技术 2018年5期
刘子洋,刘忠富,赵宏宇,刘冠初,郭 馨,吴 怡
(大连民族大学信息与通信工程学院,辽宁 大连 116600)
0 引言
在当今的社会老龄化发展趋势日益严重的大背景下,由于生理退化以及各种疾病的侵蚀使得不在少数的老年人不能够独立的生活,所以需要专人来进行陪护并照顾他们的生活起居,在耗费家人巨大精力的同时也给家庭带来沉重的心理负担及经济负担。因此通过语音及手势的无线控制系统,使这一类人群对家居环境进行更好更方便的控制,由此可以看出物联网技术及通信技术的发展对人们未来生活的智能化和便利化都具有重要的意义,且具有一定的研究价值。
近些年以来,国内外学者针对助老助残进行了深入化的研究,姚玉峰基于单片机控制技术及无线通信技术对作业型助老助残机器人进行了研究[1],该系统通过采用模块化的控制结构,从而实现人机一体化半自动的控制系统。郭鑫也基于CAN总线及以太网设计了分布式控制的助老助残机械臂控制系统[2]。
本文基于STC89C52RC单片机作为核心处理芯片,并采用NRF24L01无线发射及接收数据,同时应用LD3320及无线体感控制器进行数据采集,设计了基于语音及手势控制的助老助残系统,从而帮助一部分生理功能退化的老年人实现对生活环境进行智能化控制,减轻了家庭的负担及社会负担,并提高了这一人群的生活质量。
1 系统方案设计
本系统通过使用LD3320及无线体感控制器进行数据的采集,STC89C52RC单片机为核心处理器进行数据处理,并采用NRF24L01进行数据的接收和发送,无线传输模块在接收数据后,控制终端对数据进行识别及处理,从而对履带车机械手行进方向动作以及家居环境中电器进行控制。
2 系统硬件电路设计
本系统主要由三部分组成,信息采集模块主要有LD3320语音识别模块以及手势体感控制器。发射和接收端主要有以NRF24L01为主控芯片的无线传输模块。履带车机械臂及家居控制系统均以51单片机为主控芯片。系统整体方案图如图1所示。
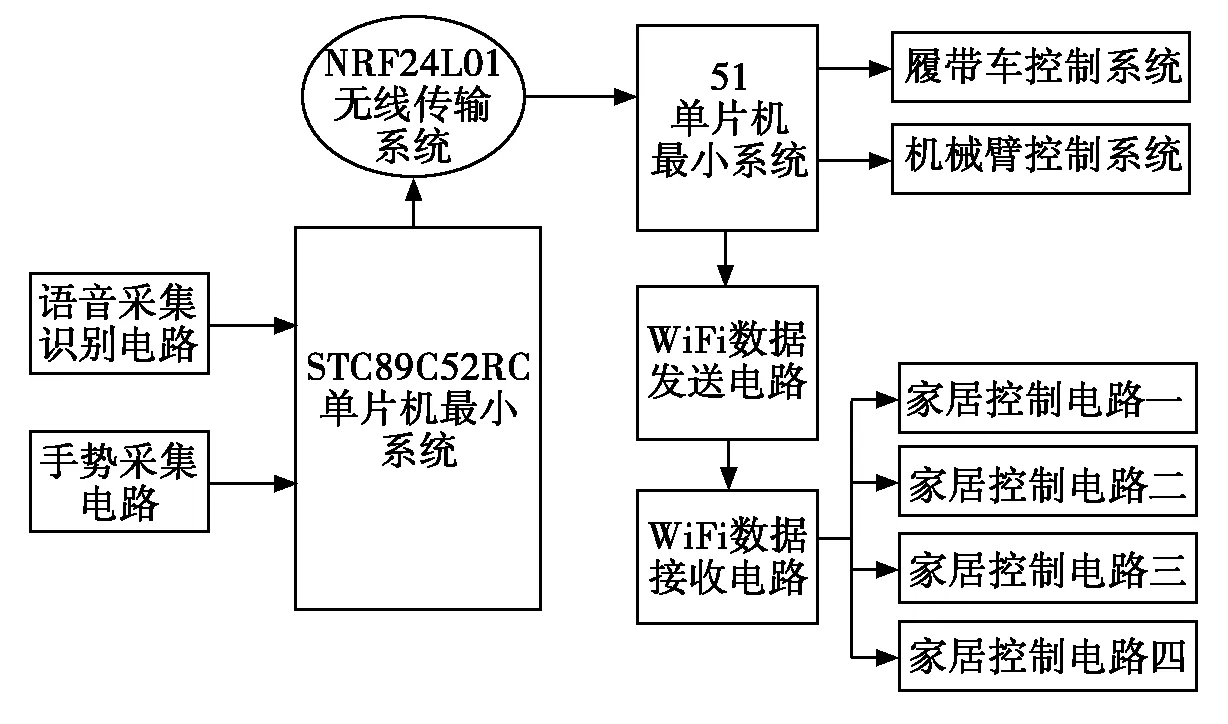
图1 系统总体方案图
2.1 单片机最小系统电路
本文中所设计的系统中的微处理器采用STC89C52RC,之所以选用这种芯片是因为其构成的最小系统简单可靠,只要在其芯片上接时钟电路以及复位电路,最小系统便可以进行工作。其时钟频率选用12 MHz。本系统中主要使用单片机串口识别功能从而实现对整个系统进行控制。
2.2 语音识别及体感控制器电路设计
2.2.1 语音识别模块电路
语音采集及识别采用STC11L08XE单片机为核心处理芯片搭载LD3320语音识别模块进行对使用者语音进行采集并进行识别。本模块采用特定人声识别原理[3],通过程序预先设置特定语句当模块识别语音输入时,将信息传递给主控单片机,主控单片机作出处理后将信息传递给无线发送模块。使无线发射模块进入工作状态。LD3320语音识别模块原理图如图2所示。
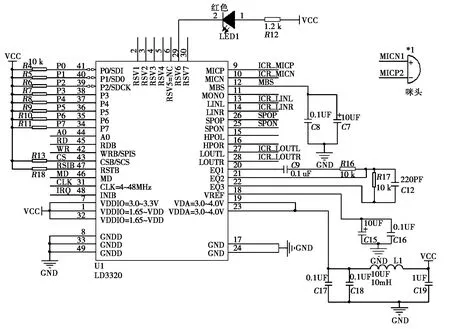
图2 LD3320语音识别模块原理图
2.2.2 体感控制器硬件设计
体感控制器通过在核心控制板上搭载五个滑动变阻器用于感应手指的运动状态,当手指进行动作时滑动变阻器的阻值会发生变化从而产生电信号的变化进而使单片机检测手指运动状态。并且也搭载了倾角传感器用于检测整个手掌的运动状态。
2.3 NR24L01无线数据传输系统设计
当底层传感器识别信息后将信号传递给NRF24L01使无线传输系统进入工作状态。NRF24L01是一种基于RFID无线传输的高效率的无线通信芯片,其可以实现一对一或者是一对多通信,速度最高可以达到2M(bps)。NRF24L01应用电路如图3所示。图中所示CE端为芯片选择发送模式及接收模式的数据选择端,并且本模块采用SPI通信协议通过串口与主控芯片进行连接,程序对其进行判断后芯片选择发送或者接收模式[4]。
2.4 履带车及机械手控制系统
履带车及机械手作为被控系统通过主控芯片将无线传输模块的数据进行识别及处理后,实现履带车前进,后退,左转,右转以及机械手抓取等功能。系统主要由以51单片机为核心处理器的单片机系统,无线接收系统,以及以L298D为控制器的二路电机控制系统。本模块需要7.4 V电源分别对履带车及机械手进行供电。
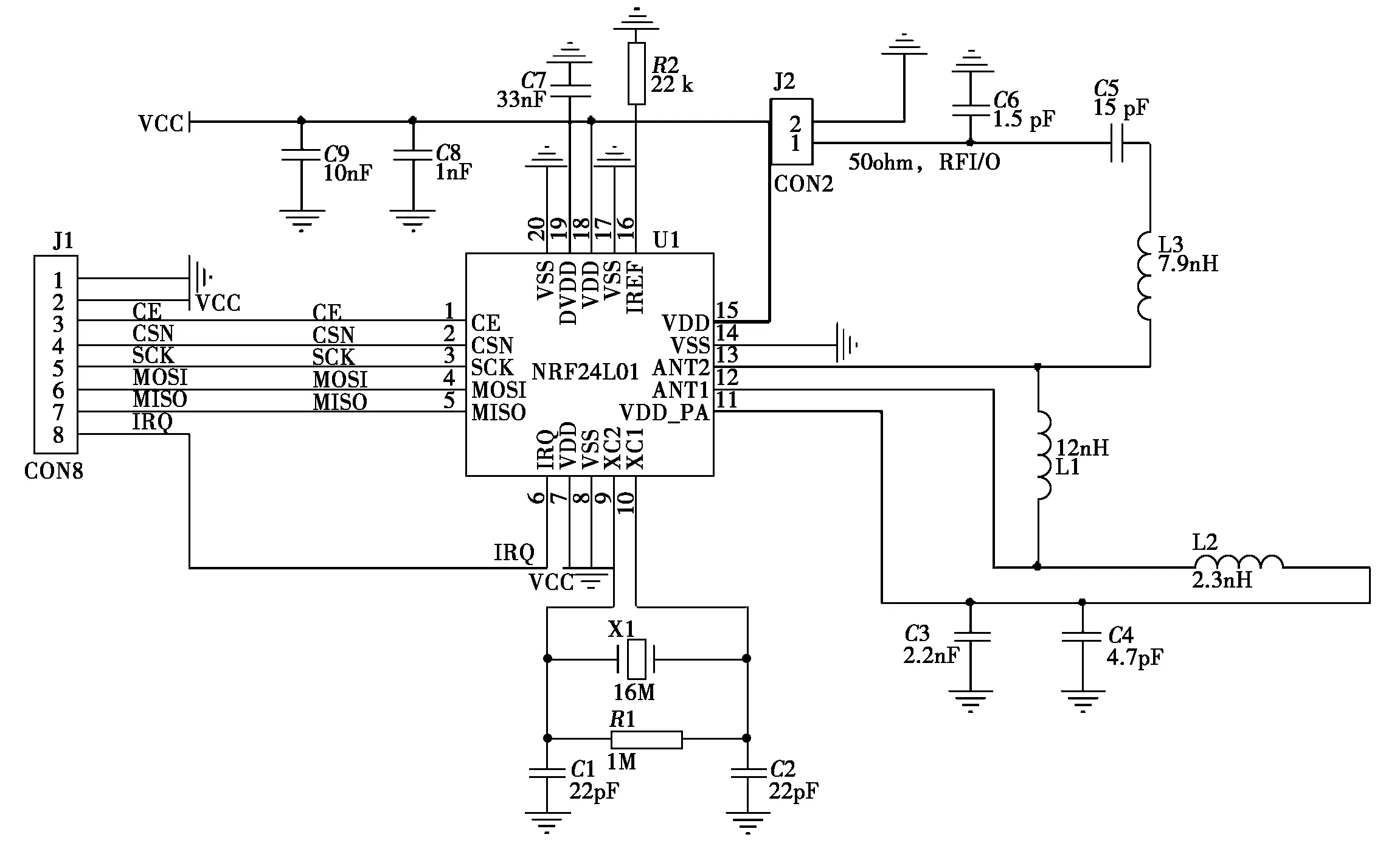
图3 NRF24L01应用电路图
机械手以stm32单片机为核心控制板,通过PC端上位机进行调节设定特定动作组,由履带车搭载行驶到要抓取物品的特定位置再通过语音及无线控制触发动作组实现物品的抓取和放置。
2.5 家居控制系统
家居控制系统以STC89C52RC单片机最小系统进行控制,当语音及体感监测端检测到语音或者动作后,触发无线模块进行工作,在家居控制电路中将接收模块的RXD,TXD端口分别接到STC89C52RC单片机的P3.1(TXD)和P3.0(RXD)从而实现两个单片机之间的通信[5],并且当主控芯片检测到所接收到的信息迅速对家居环境进行控制,从而实现语音控制家居环境。
3 系统软件设计
系统软件设计部分均以C语言为基础进行设计。整个系统的程序编写着重于语音及手势信息的识别和处理,同时也包括无线模块控制程序的编写。首先软件单片机串口以及I/O口进行初始化,当单片机识别到传感器所感应到的语音信息或者手势动作信息时其可通过串口对无线传输模块进行控制,使其进入正常的工作状态,从而对终端系统的工作进行控制。
3.1 底层信息采集程序设计
由图4所示,在底层信息采集部分程序中,首先对系统进行初始化,而后检测语音信息的输入,当检测到语音时进行语音信息处理,若检测不到语音信息则直接跳入动作检测语句,检测到动作信息将对动作信息进行处理,若检测不到动作信息进入检测循环,直到检测到信息并且触发无线模块工作。无线发射模块发送信息后则重新对信息进行检测,从而实现实时采集语音及手势信息。
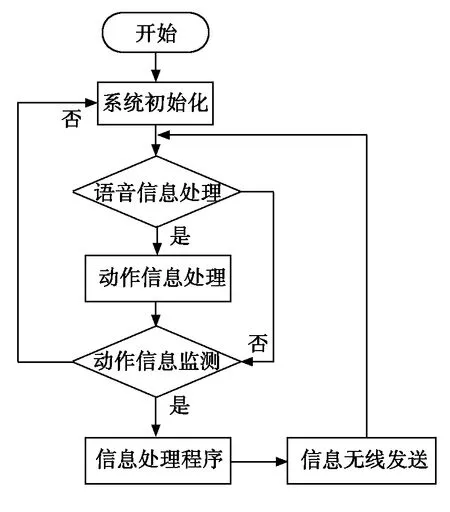
图4 底层信息采集软件设计
3.2 家居控制及履带车机械手程序设计
本部分软件系统设计流程图如图5所示,在底层信息采集信息并做出处理后通过无线发射模块发送信息[6]。传送到本部分的无线接收模块,本部分程序中将接收到的信息通过串口传送给家居控制芯片,履带车控制芯片及机械手控制芯片。其分别对接收到的信息进行处理从而实现控制,程序中通过设定特定的字符为标志位对家居环境及履带车机械手进行控制,并且整个程序不断循环检测无线模块所接收到的信息,从而及时通过标志位作出判断实现实时控制。

图5 终端软件设计流程图
4 系统调试
在调试过程中首先通过手体感控制器控制履带车进行前进,后退等动作组实现。同时也利用语音对家居电器以及机械臂动作组进行控制。并且在调试进行中通过高精度测量仪器对履带车机械臂以及家居电器核心控制板的输出电压进行测量。履带车控制输出电压测量如表1所示。
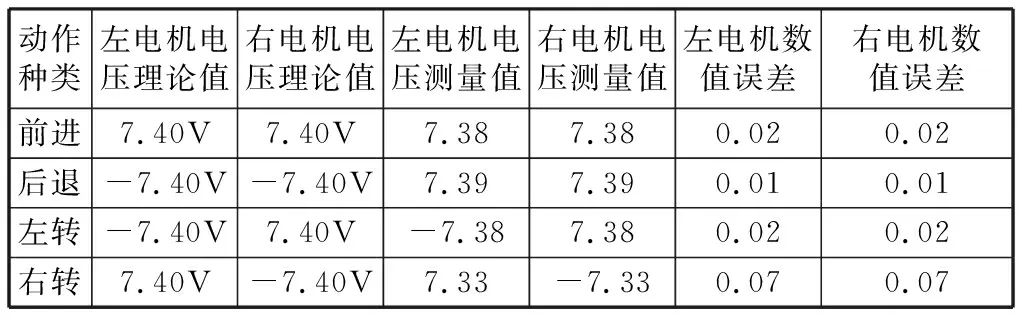
表1 履带车控制板电压输出测量表
履带车通过L298D直流电机控制板进行控制测量均为其左右电机电压输出,所以可直接测量单片机I/O口输出电压。由以上格数据所示,电压误差均在可控制范围内。
5 结束语
本文中所设计的系统将STC89C52RC单片机,NRF24L01无线传感模块,以及LD3320语音识别模块进行整合在一起设计出一套基于语音及手势控制的智能助老助残系统。本系统可以采集使用者所发出的语音及手势并对其进行判断后通过无线传输装置对动作实现终端进行远程控制。对于生理功能退化的老年人及残疾人具有极大的便利性并且其性能可靠。具有较好的应用价值。
猜你喜欢
石油化工建设(2019年6期)2020-01-16
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
小说界(2018年5期)2018-11-26
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
林业工程学报(2017年4期)2017-08-07
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16