基于四旋翼无人机的电磁环境监测分析系统
2018-11-09 09:07林崇昆
中小企业管理与科技 2018年19期
林崇昆
(深圳市艾特航空科技股份有限公司,广东深圳518000)
1 引言
无人机可对控制质量、地势环境、河流中的水资源以及农作物进行全面监测,并具备更加快速以及高效性。在四旋无人机的监测分析系统中,对于现场电磁环境以及根据计算机网络系统而言,对其进行数据分析,不过,对于地势较为复杂的山区以及信号较弱的地区,其监测能力也会有所降低。
2 监测控制软件分析研究
对于电磁环境监测分析系统而言,其主要的功能是对于电磁环境进行自动化全面的检测,并在监测数据的过程中,能够对检测数据做好相关记录,在此过程中,其主要的测量手段完全是根据电磁环境测量程序而实现的。不过,一般在测量的汇总过程中,测量系统基本暴露在空中,一旦对某较为复杂的地区进行测量时,工作人员将会无法对检测系统完全进行控制[1]。
电磁环境测量程序主要根据测量系统对其检测信号进行接收,并控制系统。对于电磁环境监测分析系统而言,需要根据不同的测试结构要求,在测量前,工作人员会对检测程序设置相应的参数,并在检测的过程中,对检测内各个部位之间的频率以及频率变动的幅值进行监测[2]。在对部分地区进行监测后,根据不同的测试数据测试频率以及频率之间的变动幅值进行明确记录,并将相应的时间记录下来。另外,在接收信号后,系统对该地区的部位坐标进行接收,将接收的信息添加到系统内部。并利用电磁环境测量程序,当无人机进行自动飞行监测时,一旦自动输入信号,并且无人机进入监测地区的范围时,其测量值达到阈值,则无人机中的检测系统将直接对监测数据进行收集,并对相应的监测数据进行储存,工作人员无须对系统进行传输指令,并对系统监测数据的储存进行接收。
3 电磁干扰定位算法以及在系统中的运行
对地区进行测量后,工作人员对所收集的数据进行管理,并生成在监测文件,对其进行保管。由于在进行监测的过程中,所寻取的采样样本是有限的,因此,以地区的任意一点作为i,并以i为中心点,进行画圆。R为半径,在R以外的区域对监测数据的影响暂且忽略不计,距离i点的距离为iij,并相应地列出公式,其公式为:

公式中Aj的为监测系统的待定参数。
当测量点数量较多时,将其作为N,那么对于测量点i具有一定的影响,其公式2为:
对于该测量点i而言,实测的电磁强度为Ei,则其公式为
对于不同的测试点N而言,根据电磁强度中的公式即可将N的待定参数计算出来为Aj,此时各个监测点的电磁强度计算出来为E,并根据不同的电磁强度,对测量内部的区域进行电磁强度变化走势图的画制,工作人员通过观察,对于电磁的干扰部位进行粗略的定位。
根据公式2可知,对数据的出力结构进行相应的分析后,其数据的准确值为R,并且与该地区的N的测量点具有一定的关系。通常而言,测量点N值越大,那么测量的结果R值的准确度就越大,N的选取值需要根据不同的实际情况而定。
4 电磁环境监测系统组成软件分析
对于所研发的监测系统而言,其主要的组成部分分别为四旋翼无人机、可控制电脑主板、数据接收信息天线、数据收集接收卡。四旋翼无人机利用新型技术无线电缆与网络计算机中的软件或者计算机中的主板进行连接,通过相应的数据收集接收卡与无人机中含有的导线相互连接,数据接收信息天线电缆之间相互连接,形成频谱模块;并定位系统的GPS模块、数据收集接收卡、依据数据变化模块全部与计算机中的USB接口相互连接,数具传输电线则需要与USB的接口根据电脑的主板以及计算机相互连接。
四旋翼无人机在飞行的过程中,需要对其飞行主板进行供电,当飞入工作人员设置的测量点后,无人机将会在该点的范围内,应用数据收集接收卡将监测信号进行收集,并且数据接收信息天线将所接收的无线电波信号进行转化,通过数据信息的转化,将会直接形成电压信号输送到频率的模块当中,并对监测数据进行分析处理。数据的分析处理系统主要包含数据传输模块以及计算机,工作人员利用相关的数据传输模块实现了监测数据的传输,并且,在此过程中,相关工作人员使用计算机时,可对电磁环境中所使用的软件进行数据分析处理。在实际对复杂的地区监测前,工作人员必须控制好四旋翼无人机,并利用相关的工作软件设置好无人机的飞行路线,将测量的参数值确定好,并根据具体的要求设置好测量点。当对监测的任务设置完毕后,监测系统则需要按照工作热人员所设定的路线,对测量点外的范围,可关闭所有的检测系统,当到达测量点的范围内,四旋翼无人机将会自动对测量系统发出信号,开启数据接收信号卡以及天线,对数据进行收集,并促使污染及自动自我飞行,并自我进行接受信息,将监测的数据存储在无人机中的电脑主板中,并对地面人工控制的计算机进行数据信息传输,在电磁环境下,可利用系统内部含有的可视化软件对数据进行相应处理,工作人员可在地面对无人机所到达的方位进行观察,根据不同时间所收集的数据信息制作出数据走向图,并在测量点的范围内,对电磁的辐射源头进行相应的判定,并粗略地找出源头的方位以及地区。
5 实验验证
为了能够准确地对四旋翼无人机的电磁环境进行监测、,相关工作人员在北京市的密云区北航科技园进行了实验验证。在无人机进行飞行监测的过程中,工作人员可通过电磁环境下的可视化软件对数据的信息进行处理,并绘制出相应的电磁态势图,如图1所示。
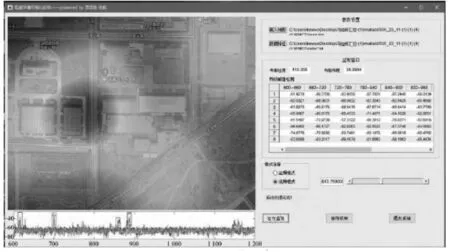
图1 电磁环境分布态势图
据图示,相关技术软件对于电磁的干扰环境的源头定位结构与实际地区的源头地理位置相差无几,并且能够对相应的数据进行收集而且能够传输。由此可见,形影的绘制测量,能够找出电磁干扰的源头位置。
6 结论
综上所述,对基于四旋翼无人机的电磁环境监测分析系统,在经过相应的对监测控制软件分析研究后,电磁干扰定位算法以及在系统中的运行,电磁环境监测系统组成软件分析以及实验验证,实现了对电磁环境的自动定点测量。
猜你喜欢
航空学报(2022年5期)2022-07-04
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
模具制造(2019年10期)2020-01-06
科学导报·科学工程与电力(2019年5期)2019-10-20
电子制作(2019年9期)2019-05-30
铁道通信信号(2019年11期)2019-05-21
自动化与仪表(2019年2期)2019-03-06
北京航空航天大学学报(2016年8期)2016-11-16
振动工程学报(2015年1期)2015-03-01