
机器人综合性实验设计
2018-11-08 09:01陈世海牛小玲毛会琼
实验技术与管理 2018年10期
陈世海, 王 军, 代 伟, 牛小玲, 毛会琼, 李 明
(中国矿业大学 信息与控制工程学院, 江苏 徐州 221116)
大一是学生从高中阶段到大学阶段的转折期,同时也是大学生发展最为关键的时期[1]。研究表明,大学生的成功与否在很大程度上取决于其在大一时期的经历[2]。对于以实践为根本特征的高等工程教育[3],大一时期获取的专业知识和早期工程体验[4-5],不仅可以加强学生对专业的认同感,而且可以有效地激发专业学习兴趣,促使其完成从以追求好成绩为目标的被动式学习[6],向以探究科学知识、解决复杂工程问题为目标的主动式学习快速转变。
然而,现有工程教育体系基本沿用了科学教育模式,在教学活动的组织与安排上,过于强调知识的系统性和完备性[7],所以大一阶段的课程侧重于培养学生数理基础,从而导致大一学生被置于专业学习的大门之外。尽管面向大一学生开设的专业概论或者导论等类似课程或者讲座,能够提升学生对专业的认知度和学习兴趣[8-14],但这类课程通常是范围广、学时少,同时又没有相应的实践环节,无法给学生提供清晰的专业认知和切身的工程体验。
为了解决这一问题,结合电气信息类专业大一下学期开设的智能机器人导论课,秉承“以学生为中心,以产出为导向”的教学理念,并针对大一学生专业知识薄弱、实验技能欠缺的特点,以《工程教育认证标准》[15]所提出的“毕业要求”为抓手,设计了基于Arduino UNO[16]的车形机器人综合性实验,以帮助学生尽早跨进专业大门、增强专业认同感,并促使大一学生向以解决复杂工程问题为目标的主动式学习转变。
1 设计思路
实验设计遵照《工程教育认证标准》,以培养学生解决复杂工程问题能力为核心,主要从“工程知识”“问题分析”“设计/开发解决方案”“研究”“使用现代工具”“沟通”“终身学习”等8个方面的毕业要求出发,设计实验的具体内容与要求。同时,考虑到大一学生几乎没有任何专业知识和工程经验,所以在实验教学目标的设定、教学内容的选取以及教学活动的组织上,又与面向高年级学生开设的综合性实验有着很大的差别。
首先,实验的教学目标不是侧重于传授某些专业知识或是培养某种专业技能,而是侧重于给学生提供一种早期的工程体验,通过这种专业上的切身经历,使学生构建起专业基本框架,明确专业学习方向与方法,并在解决实验问题过程中体验精神满足感、激发专业学习兴趣。
其次,在教学内容的选取上要充分考虑大一学生专业知识匮乏、实验技能欠缺的现状,实验不能涉及过于繁杂的专业细节,同时又要兼顾实验的综合性与趣味性。所以,选择基于Arduino UNO的车形机器人作为实验对象,其积木式的硬件和基于API的软件开发,屏蔽了大部分硬件和软件设计细节,极大地降低了对学生专业基础的要求,进而使学生能够更多地专注于机器人的控制、循迹与避障等功能的实现。
最后,在教学活动的组织上,将整个实验分成3个阶段开展。第一阶段为实验准备阶段,讲授并指导学生使用文献检索工具获取实验相关工程原理与知识,指导学生以小组方式构建学习共同体,同时明确实验要求及考核方式;第二阶段为实验操作阶段,重点引导学生应用准备阶段获取的专业知识,去分析、讨论、探究并尝试解决车形机器人控制、循迹以及避障时所出现的问题;第三阶段为实验总结阶段,采用小组答辩的方式,重点从专业知识获取、团队管理与运作、实验问题探究与解决等方面阐述心得体会。同时强调,实验报告要着重反映对实验中遇到的各种故障、“异常”现象的探究与解决过程。
2 实验原理
车形机器人主要由底盘、支架、车轮、电机和运动控制电路等部分组成。车形机器人运动控制电路结构如图1所示。其中红外循迹单元用于检测车形机器人相对于轨迹线的位置;超声测距单元用于检测同前方障碍物的距离;电机驱动单元用于驱动车轮直流电机;电源部分采用7.4 V锂电池组为整个系统供电; Arduino UNO是系统的运算与控制核心,通过检测红外循迹和超声测距输出信号,判断机器人当前位置状态,并据此控制电机转向和转速,从而实现循迹与避障。
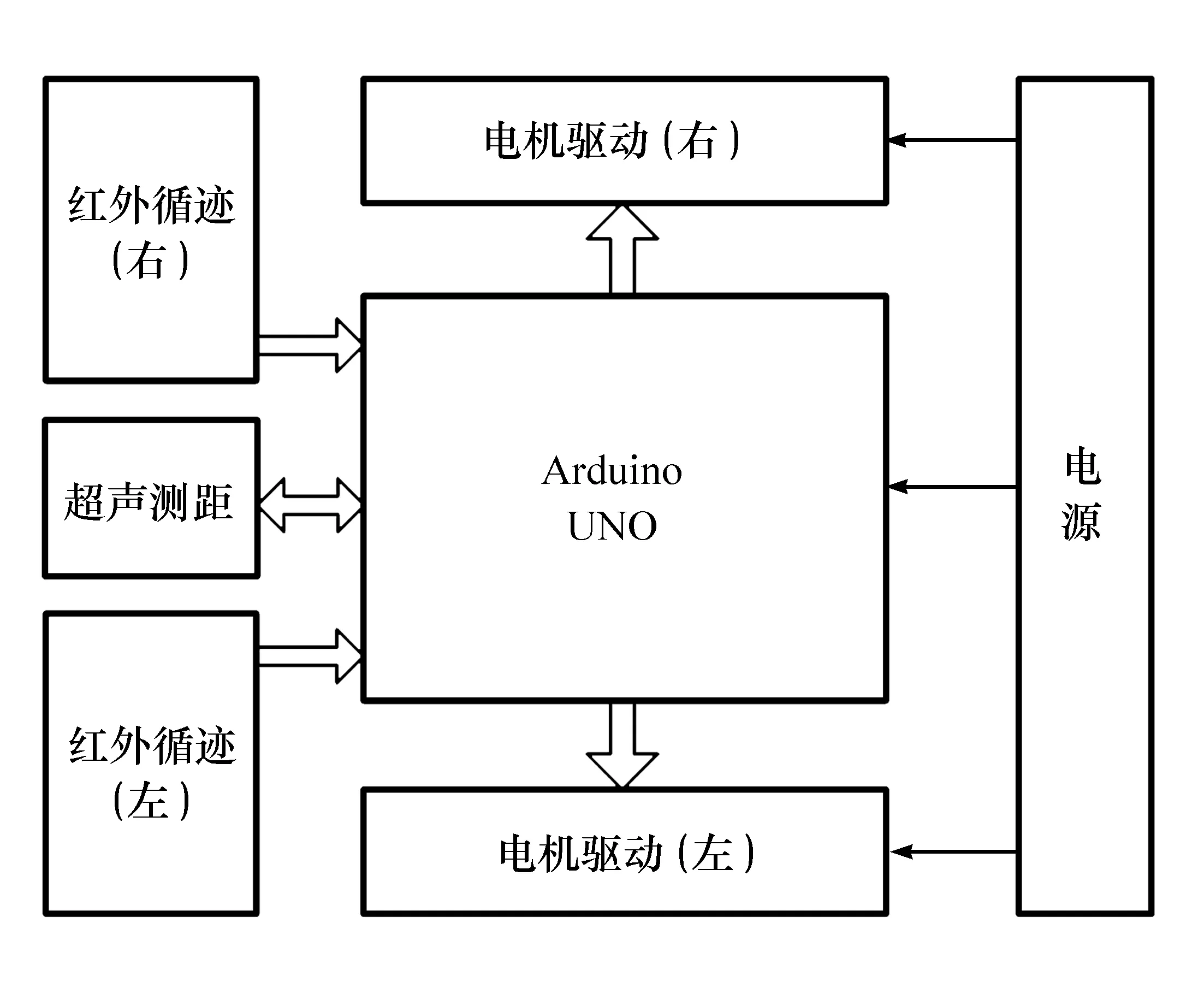
图1 车形机器人运动控制电路结构
2.1 Arduino UNO
车形机器人采用Arduino UNO作为传感与控制平台。Arduino UNO是以ATmega328P微处理器为核心的开源硬件平台,具有14个数字量输入输出接口(其中6个接口可以输出PWM信号)、6个模拟量输入接口、32 KB的Flash Memory、2 KB的SRAM以及1 KB的EEPROM。Arduino UNO通过应用程序编程接口(application programming interface,简称API)封装了对ATmega328P寄存器级的操作,通过这些API可以直接完成功能级的编程。编译后的程序代码可以通过Arduino UNO自带的USB接口,直接下载到ATmega328P,不需单独的编程器,在不需要下载时,该USB接口还可以用于同计算机进行串行通信。车形机器人超声避障传感器通过PIN8、PIN9与Arduino UNO相连,其中PIN8设为输出模式,用于控制超声波信号的发射,PIN9设为输入模式用于接收超声波回波信号。车形机器人共有2个红外循迹传感器,分别与管脚PIN2、PIN6相连,这2个管脚均设为输入模式;驱动部分共占用6个管脚,其中PIN14—PIN17设定为输出,用于控制电机转向,PIN5和PIN3用于控制电机转速。
2.2 超声避障
避障单元采用了超声测距传感器,该传感器主要由超声波发射、接收以及控制电路组成。Arduino UNO通过PIN8向传感器的TRIG管脚发出一个触发信号,超声发射部分即发出40 kHz的超声波信号,超声波信号遇到前方障碍物将被反射回来,接收部分收到回波信号后产生一个高电平,并通过ECHO脚反馈至PIN9。设超声波在空气中的传播速度v, Arduino UNO记录的超声波传播时间t,则车形机器人与前方障碍物之间的距离S=(v·t)/2。需要说明的是,超声波在空气中的传播速度并不是固定不变的,在需要精确测量到障碍物的距离时,需要考虑温度对超声传播速度的影响,并进行修正。
2.3 红外循迹
红外循迹传感器主要由红外发射管、红外接收管和电压比较器构成,传感器根据预铺轨迹线和地板对红外光具有不同的反射率来实现循迹。实验中采用黑色电工胶带在实验室浅色瓷砖地面铺设行驶路线。当发射管和接收管在瓷砖上方时,红外光被地面反射回来的光强就高,接收管输出的电压就高;当发射管和接收管在预铺的轨迹线上方时,红外光大部分被黑色胶带吸收,导致接收管输出的电压降低。接收管输出的电压进入比较器和预设参考电压比较,输出与光强对应的电平信号。实验所用红外循迹传感器输出高电平表示反光弱,而低电平则表示反光强。传感的灵敏度,可以通过旋转可调电位器改变比较器的输入参考电压来实现。车形机器人共有一左一右2个红外传感器,通常采用跨线行驶方式,即传感器位于轨迹线两侧,当某一侧循迹传感器输出低电平时,即说明车形机器人偏向该侧。根据两侧传感器输出的信号即可判断出机器人是否偏离行驶轨迹。
2.4 电机驱动
车形机器人采用四轮驱动方式,为简化系统设计,同侧车轮的直流电机采取并联方式,这样使用一块双H桥的L293D驱动板即可实现直流电机驱动。车形机器人的前进、后退、转弯,以及调速都是通过Arduino UNO向L293D驱动板发出控制信号实现的。图2为L293D芯片H桥驱动原理。L293D的使能管脚ENA和控制管脚IN2为“1”、IN1为“0”时,三极管T2和T3导通,电流从电源“+VS”端经T3流向电机“+”极,然后再从电机“-”极经T2流回电源GND端,此时电机正转;同理,T1和T4导通时,电机反转。转弯时,一侧电机停转,另一侧电机转动即可以实现向停转电机一侧转向。电机调速采用PWM方式,即Arduino UNO按固定周期向ENA管脚输出“1”或“0”,使电机接通或断开电源,通过改变一个周期内“1”的持续时间改变电机接通电源的时长。只要周期选择合适,电机即可以在这种周期性脉冲作用下连续运转,电机的转速取决于一个周期内的通电时间。需要说明的是,同侧直流电机采用相向安装方式,所以两个电机必须异号并联,即一个电机的“+”和另一个电机的“-”并联,否则同侧车轮相向或者背向旋转将导致机器人无法运动。

图2 L293D芯片H桥驱动原理
3 实验设计
实验采用3~4人的团队形式,围绕《工程教育认证标准》提出的具体毕业要求,按照实验准备、实验操作和实验总结3个阶段展开。实验主要内容及考核方式见表1。
(1) 实验准备阶段。该阶段主要从“工程知识”“设计/开发解决方案”和“终身学习”等3个方面的毕业要求出发,引导学生分解实验任务,通过查阅文献、小组讨论等方式,自学车形机器人驱动、循迹和避障等方面的理论知识,并进一步设计出循迹和避障程序流程图及代码,同时给出具体的实验方法和步骤。最后将相关理论知识、程序流程图和实验步骤等整理至实验预习报告。指导教师审核实验预习报告并给出预习成绩,对于不合格的小组,指出其存在问题并进行有针对性的指导,待其修改并通过审核后方可进入操作阶段。
(2) 实验操作阶段。该阶段主要从“使用现代工具”“问题分析”“研究”和“沟通”等4个方面的毕业要求出发,指导学生完成车形机器人组装、循迹以及避障等实验要求。同时考虑到学生能力的差异性,操作阶段的实验内容和要求,按难易程度划分为基础、拓展和提高3个部分。指导教师按表1中的考核内容与分值,根据学生的实际操作情况和实验结果评定操作成绩,并对实验结果不理想的小组进行有针对性的指导。

表1 实验主要内容及考核方式
(3) 实验总结阶段。该阶段侧重于“问题分析”“研究”和“沟通”3方面的毕业要求。各小组采用答辩方式汇报实验中所遇到的问题及其分析与解决过程,以及实验心得体会等,指导教师针对答辩情况并予以现场点评并核定答辩成绩,1周后以小组为单位提交实验报告(附小组分工、源代码及讨论纪要等)。
4 结语
面向大一的机器人综合性实验,选用了适于大一学生开发使用的车形机器人套件作为实验平台,遵照《工程教育认证标准》要求,以学生为中心,以产出为导向,以毕业要求为抓手,针对大一学生专业基础薄弱的特点设计了具体的综合性实验方案。近3年的教学实践表明,实验不仅提高了大一学生对专业的认知度、认同感和学习兴趣,而且给学生提供了一种早期工程体验,明确了专业学习方向和学习方法,为毕业要求的达成和培养目标的实现奠定了良好的基础。在2017年全国电工电子基础课程实验教学案例设计竞赛中,该实验荣获电子综合设计类二等奖。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电子制作(2017年1期)2017-05-17
能源(2016年2期)2016-12-01
电子制作(2016年11期)2016-11-07
制造业自动化(2016年8期)2016-09-12
电子产品可靠性与环境试验(2016年6期)2016-05-17
电子测试(2013年22期)2013-09-26
